一种肺功能仪校准器及校准控制方法与流程
1.本发明一般涉及医疗器械技术领域,具体涉及一种肺功能仪校准器及校准控制方法。
背景技术:
2.肺功能仪是用于肺部功能检测和评估的重要医疗设备,其主要包括肺量计、压力计及气体分析仪。实际使用时,通过检测呼吸气体的流量、体积、成分和压力等生理指标,即可对受试者肺部健康状况进行有效跟踪,这有助于肺部疾病的早期筛查与诊断评估、手术风险的预测、诊疗方案的制定。
3.随着科技的不断发展和进步,肺功能仪的功能更加完善,与此相关的计量标准和校准装置也需与时俱进。然而,相关技术中肺功能仪校准装置的气体输出波形精准度低,校准结果可靠性差。
技术实现要素:
4.鉴于相关技术中的上述缺陷或不足,期望提供一种肺功能仪校准器及校准控制方法,能够提高气体输出波形的精准度,使其更加贴合标准波形,从而提升校准结果的可靠性。
5.第一方面,本技术提供一种肺功能仪校准器,所述校准器包括:
6.气缸,所述气缸内部设置有可轴向滑动的活塞,所述活塞中心的一端贴附有第一压力传感器,所述活塞中心的另一端连接有丝杠;
7.设置在所述气缸一端的通气口和过孔,所述过孔与所述活塞中心平齐,用以穿出所述丝杠;
8.设置在所述气缸另一端的湿度控制装置开口和气管开口,所述湿度控制装置开口密封连接有除湿加湿一体机,所述气管开口密封连接有气管,所述气管内设置有第二压力传感器、湿度传感器、温度传感器和气体体积流量传感器,所述气管外表面包裹有套管,所述套管内均匀分布有加热制冷元件;
9.设置在所述气缸底座的伺服系统和控制器,所述伺服系统与所述丝杠连接,所述控制器用于根据所述第一压力传感器、所述第二压力传感器、所述湿度传感器、所述温度传感器、所述气体体积流量传感器的测量结果以及标准波形值,调整所述除湿加湿一体机、所述加热制冷元件和所述伺服系统的运行参数。
10.可选地,在本技术一些实施例中,所述活塞与所述过孔之间设置有光电检测限位,所述光电检测限位连接所述控制器,所述光电检测限位中发射端和接收端分别位于所述丝杠的两侧,并固定于所述气缸的内壁;
11.所述丝杠上设置有光电检测第一通孔和光电检测第二通孔,所述光电检测第一通孔位于所述丝杠靠近所述活塞的一侧,所述光电检测第二通孔位于所述丝杠远离所述活塞的一侧。
12.可选地,在本技术一些实施例中,所述伺服系统包括伺服电机和步进电机中的任意一种,其中所述步进电机安装有编码器或者光栅。
13.可选地,在本技术一些实施例中,所述气管的外端口处设置有可拆卸堵头,所述堵头插入所述气管的部分包裹有密封圈。
14.可选地,在本技术一些实施例中,所述气缸底座上设置有滑轮。
15.第二方面,本技术提供一种校准控制方法,所述方法应用于第一方面中任意一项所述的肺功能仪校准器,包括:
16.所述控制器采集所述温度传感器和所述湿度传感器的第一测量结果,并根据所述第一测量结果与目标温湿度值的差值,对所述除湿加湿一体机和所述加热制冷元件的运行参数进行调整,直到所述第一测量结果为所述目标温湿度值。
17.可选地,在本技术一些实施例中,所述方法还包括:
18.所述控制器采集所述湿度传感器、所述温度传感器、所述第一压力传感器和所述气体体积流量传感器的第二测量结果,并根据所述第二测量结果与目标波形值的差值,对所述伺服系统的运行参数进行调整,直到所述第二测量结果与所述目标波形值相同。
19.可选地,在本技术一些实施例中,所述方法还包括:
20.所述控制器控制开启光电检测限位发射端,并当光电检测限位接收端采集到所述光电检测限位发射端的信号时,向所述伺服系统发送制动参数。
21.可选地,在本技术一些实施例中,所述方法还包括:
22.所述控制器控制所述伺服系统带动所述活塞匀速挤压所述气缸内的气体,并循环采集所述第一压力传感器和所述第二压力传感器的第三测量结果,直到所述第三测量结果中第一正压力值均大于第一阈值时,控制所述伺服系统停止工作,以及记录所述第一正压力值为压力初值;
23.在间隔预设时间之后,所述控制器采集所述第一压力传感器和所述第二压力传感器的第四测量结果,并根据所述第四测量结果中第二正压力值与所述压力初值,计算所述预设时间内的漏气量。
24.可选地,在本技术一些实施例中,所述方法还包括:
25.所述控制器控制所述伺服系统带动所述活塞加速挤压所述气缸内的气体,并循环采集所述气体体积流量传感器和所述第一压力传感器的第五测量结果,当所述第五测量结果中第一流量值达到第二阈值时,控制所述伺服系统匀速推动所述活塞;
26.所述控制器采集所述第一压力传感器和所述第二压力传感器的第六测量结果,并根据所述第六测量结果中第二流量值与所述第一流量值,计算所述肺功能仪校准器的气道阻力。
27.本技术提供了一种肺功能仪校准器及校准控制方法,该校准器中控制器能够根据第一压力传感器、第二压力传感器、湿度传感器、温度传感器、气体体积流量传感器的测量结果以及标准波形值,实时调整除湿加湿一体机、加热制冷元件和伺服系统的运行参数,使得气体输出波形更加贴合标准波形,因此提高了输出精准度和可靠性。
附图说明
28.通过阅读参照以下附图所作的对非限制性实施例所作的详细描述,本技术的其它
特征、目的和优点将会变得更明显:
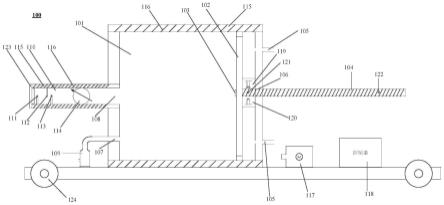
29.图1为本技术实施例提供的一种肺功能仪校准器的结构示意图;
30.图2为本技术实施例提供的一种肺功能仪校准器的线路连接示意图;
31.图3为本技术实施例提供的一种气体温湿度全闭环反馈控制子系统的结构示意图;
32.图4为本技术实施例提供的一种输出气体流量和体积全闭环反馈控制子系统的结构示意图;
33.图5为本技术实施例提供的一种活塞紧急制动全闭环反馈控制子系统的结构示意图。
34.附图标记:
35.100-肺功能仪校准器;101-气缸;102-活塞;103-第一压力传感器;104-丝杠;105-通气口;106-过孔;107-湿度控制装置开口;108-气管开口;109-除湿加湿一体机;110-气管;111-第二压力传感器;112-湿度传感器;113-温度传感器;114-气体体积流量传感器;115-套管;116-加热制冷元件;117-伺服系统;118-控制器;119-光电检测限位发射端;120-光电检测限位接收端;121-光电检测第一通孔;122-光电检测第二通孔;123-堵头;124-滑轮。
具体实施方式
36.为了使本技术领域的人员更好地理解本技术方案,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本技术保护的范围。
37.本技术的说明书和权利要求书及上述附图中的术语“第一”“第二”“第三”“第四”等(如果存在)是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便描述的本技术的实施例能够以除了在这里图示或描述的那些以外的顺序实施。
38.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本技术。
39.为了便于理解和说明,下面通过图1至图5详细的阐述本技术实施例提供的肺功能仪校准器及校准控制方法。
40.请参考图1,其为本技术实施例提供的一种肺功能仪校准器的结构示意图。该肺功能仪校准器100包括气缸101,气缸101内部设置有可轴向滑动的活塞102,活塞中心的一端贴附有第一压力传感器103,活塞中心的另一端连接有丝杠104,比如该第一压力传感器103可以包括膜片偏位式压力传感器。
41.设置在气缸101一端的通气口105和过孔106,其中过孔106与活塞中心平齐,用以穿出丝杠104,而该过孔106的上侧和下侧对称分布有两个通气口105。
42.设置在气缸101另一端的湿度控制装置开口107和气管开口108,该湿度控制装置开口107与固定于气缸101底座的除湿加湿一体机109密封连接,该气管开口108密封连接有气管110,其中气管110内设置有第二压力传感器111、湿度传感器112、温度传感器113和气
体体积流量传感器114,比如第二压力传感器111可以包括膜片偏位式压力传感器、湿度传感器112可以包括湿敏电容传感器、温度传感器113可以包括金属热电阻温度传感器、以及气体体积流量传感器114可以包括流量误差小于0.1%或者0.003l/s(0-20l/s以较大者为准)的高精度低压差式气体体积流量传感器。气管110外表面包裹有套管115,套管115内均匀分布有加热制冷元件116,比如该加热制冷元件116可以包括半导体加热制冷片。除此之外,气缸101的外表面也包裹有套管115,该套管115固定于气缸101底座,套管115的长度与气缸101的长度相同。
43.设置在气缸101底座的伺服系统117和控制器118,其中伺服系统117与丝杠104连接,控制器118用于根据第一压力传感器103、第二压力传感器111、湿度传感器112、温度传感器113、气体体积流量传感器114的测量结果以及标准波形值,调整除湿加湿一体机109、加热制冷元件116和伺服系统117的运行参数。需要说明的是,标准波形是指美国胸腔协会推荐的24个标准体积-时间波形和26个标准流量-时间波形以及国际标准化组织推荐的波形。
44.可选地,本技术一些实施例中活塞102与过孔106之间设置有光电检测限位,如图2所示该光电检测限位连接控制器118,光电检测限位中发射端119和接收端120分别位于丝杠104的两侧,并固定于气缸101的内壁。其中,发射端119可以包括高准直性能的led光源,接收端120可以包括高灵敏度的光电探测器。相应地,丝杠104上设置有光电检测第一通孔121和光电检测第二通孔122,两通孔大小能够保证光电检测限位所形成的光路通过。其中,光电检测第一通孔121位于丝杠104靠近活塞102的一侧,当活塞102拉到临近光电检测限位的固定位置时,光电检测限位所形成光路恰能通过光电检测第一通孔121,而光电检测第二通孔122位于丝杠104远离活塞102的一侧,当活塞102推到临近气管开口108的固定位置时,光电检测限位所形成光路恰能通过光电检测第二通孔122。这样设置的好处是能够对活塞102移动范围进行非接触式限制,避免限位损耗,延长了使用寿命。
45.可选地,本技术一些实施例中伺服系统117可以包括伺服电机和步进电机中的任意一种,其中步进电机安装有编码器或者光栅,此时通过系统内部的全闭环或半闭环控制实现伺服功能,同时还需避免步进电机存在的堵转和失步问题。
46.可选地,本技术一些实施例中气管110的外端口处设置有可拆卸堵头123,该堵头123插入气管110的部分包裹有密封圈。需要说明的是,本技术实施例中气管110外端口是指与待校准肺功能仪连接的端口。
47.可选地,本技术一些实施例中气缸101底座上设置有滑轮124。
48.基于前述实施例,本技术实施例提供一种校准控制方法,该方法可以应用于图1-2对应实施例的肺功能仪校准器100中,此时可以将肺功能仪校准器100划分为气体温湿度全闭环反馈控制子系统,输出气体流量和体积全闭环反馈控制子系统,以及活塞紧急制动全闭环反馈控制子系统。下面对各个全闭环反馈控制子系统的控制过程进行详细说明。
49.如图3所示,其为本技术实施例提供的一种气体温湿度全闭环反馈控制子系统的结构示意图。在维持或者调整内部气体温湿度时,本技术实施例中控制器118采集温度传感器118和湿度传感器112的第一测量结果,并根据该第一测量结果与目标温湿度值(body temperature and pressure-saturated,btps)的差值,对除湿加湿一体机109和加热制冷元件116的运行参数进行调整,直到第一测量结果为目标温湿度值。本技术实施例通过实时
追踪和修正气体温湿度,从而保证了肺功能仪校准器100的输出气体或者内部气体温湿度为设定的目标值。
50.如图4所示,其为本技术实施例提供的一种输出气体流量和体积全闭环反馈控制子系统的结构示意图。在肺功能仪校准器100输出气体的过程中,控制器118采集第二压力传感器111、湿度传感器112、温度传感器113和气体体积流量传感器114的第二测量结果,并根据该第二测量结果与目标波形值的差值,对伺服系统117的运行参数进行调整,直到第二测量结果与目标波形值相同。比如,控制器118根据btps转换系数修正公式,即
[0051][0052]
式(1)中,h表示相对湿度,t表示绝对温度。
[0053]
将气管110内气体的温度、湿度和压力(atp)条件下输出气体的流量和体积,实时转换为btps条件下输出气体的流量和体积,然后根据二者与目标波形值的差值进行参数调整。本技术实施例通过实时追踪、修正输出气体的流量和体积波形,保证其与设定的目标波形值相同。
[0054]
如图5所示,其为本技术实施例提供的一种活塞紧急制动全闭环反馈控制子系统的结构示意图。在伺服系统117带动活塞102推出气缸101内气体或将外界气体抽入气缸101的过程中,本技术实施例控制器118控制开启光电检测限位发射端119,并实时采集光电检测限位接收端120的信号。当光电检测限位发射端119产生的光路通过光电检测第一通孔121或者光电检测第二通孔122,即光电检测限位接收端120采集到光电检测限位发射端119的信号时,控制器118向伺服系统117发送制动参数,进而伺服系统117停止推拉活塞102。本技术实施例通过实时采集光电检测限位接收端120的信号,保证了活塞102可以在预设行程内移动。
[0055]
进一步地,本技术实施例还可以对肺功能仪校准器100进行气密性检测。比如,在控制器118控制伺服系统117带动活塞102使肺功能仪校准器100内充满气体之后,安装堵头123,并开启图3所示的气体温湿度全闭环反馈控制子系统,以及图5所示的活塞紧急制动全闭环反馈控制子系统。控制器118控制伺服系统117带动活塞102匀速挤压气缸101内的气体,并循环采集第一压力传感器103和第二压力传感器111的第三测量结果,直到该第三测量结果中第一正压力值均大于第一阈值(例如3cmh2o)时,控制伺服系统117停止工作,以及待二者示数稳定,记录第一正压力值为压力初值。在间隔预设时间(例如1min)之后,控制器118继续采集第一压力传感器103和第二压力传感器111的第四测量结果,并根据该第四测量结果中第二正压力值与压力初值,计算预设时间(例如1min)内的漏气量。当漏气量小于2ml时,表明肺功能仪校准器100气密性良好。
[0056]
进一步地,本技术实施例还可以对肺功能仪校准器100进行气道阻力检测。比如,在控制器118控制伺服系统117带动活塞102使肺功能仪校准器100内充满气体之后,开启图3所示的气体温湿度全闭环反馈控制子系统,以及图5所示的活塞紧急制动全闭环反馈控制子系统。控制器118控制伺服系统117带动活塞102加速挤压气缸101内的气体,并循环采集气体体积流量传感器114和第一压力传感器103的第五测量结果,当该第五测量结果中第一流量值达到第二阈值(例如14l/s)时,控制伺服系统117匀速推动活塞102,以保证流量信号稳定并且压力信号不变。之后,控制器118继续采集第一压力传感器103和第二压力传感器
111的第六测量结果,并根据该第六测量结果中第二流量值与第一流量值,即气道内流过单位流量的气体所需的压力差,计算肺功能仪校准器100的气道阻力。当气道阻力小于0.3cmh2o/l/s时,表明肺功能仪校准器100气道阻力满足校准要求。因此,本技术实施例能够衡量长期处于连续工作状态下肺功能仪校准器100的可靠性,同时还能够丰富其功能。
[0057]
需要说明的是,本实施例中与其它实施例中相同步骤和相同内容的说明,可以参照其它实施例中的描述,此处不再赘述。
[0058]
本技术提供的肺功能仪校准器及校准控制方法,该校准器中控制器能够根据第一压力传感器、第二压力传感器、湿度传感器、温度传感器、气体体积流量传感器的测量结果以及标准波形值,实时调整除湿加湿一体机、加热制冷元件和伺服系统的运行参数,使得气体输出波形更加贴合标准波形,因此提高了输出精准度和可靠性。
[0059]
以上描述仅为本技术的较佳实施例以及对所运用技术原理的说明。本领域技术人员应当理解,本技术中所涉及的发明范围,并不限于上述技术特征的特定组合而成的技术方案,同时也应涵盖在不脱离所述发明构思的情况下,由上述技术特征或其等同特征进行任意组合而形成的其它技术方案。例如上述特征与本技术中公开的(但不限于)具有类似功能的技术特征进行互相替换而形成的技术方案。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1