高铁车厢紫外消杀机器人
本发明属于公共场所用消杀设备,具体涉及高铁车厢紫外消杀机器人。
背景技术:
1、高铁车厢属于密闭空间,空间窄小、空气流动性差及人流量大,座椅、扶手、卫生间及地毯等处容易滋生细菌,使得高铁车厢极易成为污染源与传染源。为了预防病毒在高铁车厢内的传播,有效地切断传播途径,通常需要在高铁到站后对高铁车厢进行消杀。目前,高铁车厢进行消杀主要采用以下两种方式:a.紫外线消毒,紫外线消毒是较为常见的一种消杀方法,在进行紫外线消毒的过程中,利用适当波长的紫外线能够破坏微生物中的dna或rna结构,造成生长性细胞死亡和/或再生性细胞死亡,从而达到对高铁车厢的杀菌消毒效果;b.臭氧消毒,臭氧能氧化分解细菌内葡萄糖所需的酶,使细菌灭活死亡,同时可以与细菌、病毒作用,破坏其细胞器、dna和rna结构,使细菌的新陈代谢受到破坏,导致细菌死亡,并且能透过细胞膜组织,侵入细胞内,作用于外膜的脂蛋白和内部的脂多糖,使细菌发生通透性畸变而溶解死亡。
2、现有技术中,低压汞灯是最常用的紫外消毒技术,该技术采用汞灯作为光源,常运用于一些不耐热物体表面消毒,虽然汞灯消毒技术已经发展相对成熟,但尚存在能量强度低、消杀效率低、光谱单一及产生二次污染等缺点;而臭氧本身活性较强,较易分解,但是消毒后残留的臭氧对人体呼吸道有一定危害,并且相对湿度较低时,消毒效果受到较大影响,单独进行臭氧消毒所需时间较长。因此,需要对现有技术进行改进,提出更为合理的技术方案,解决现有技术存在的问题。
技术实现思路
1、为解决现有技术中紫外消毒杀毒效果差和臭氧消毒存在副作用的问题。
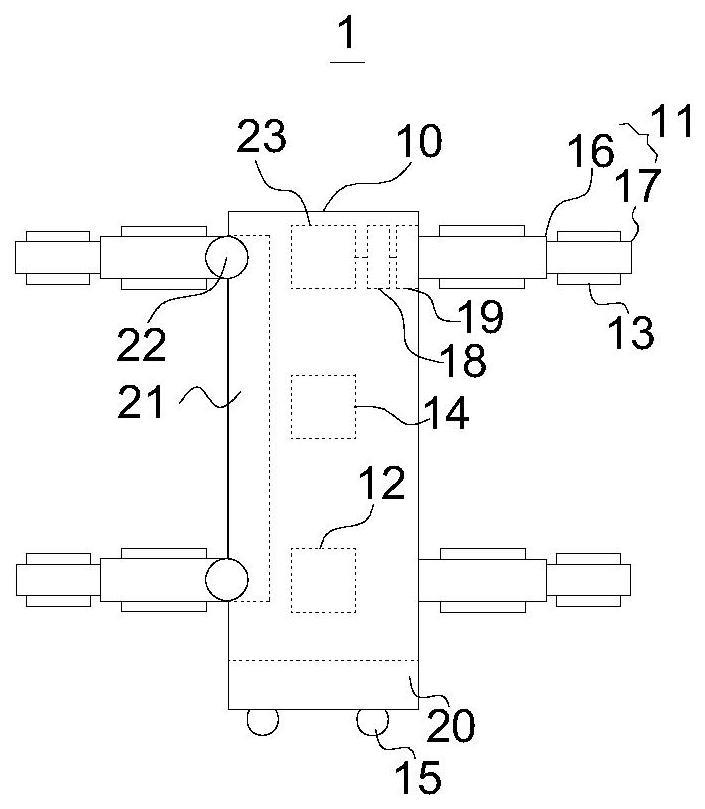
2、本发明实施例提出了一种高铁车厢紫外消杀机器人,包括:机体、主控单元、高压惰性气体放电组件、一个或多个伸缩臂和高能脉冲紫外灯;其中,主控单元和高压惰性气体放电组件均设置在机体内,伸缩臂与机体连接,高能脉冲紫外灯设置在伸缩臂的外壁;伸缩臂、高压惰性气体放电组件和高能脉冲紫外灯均与主控单元电连接,伸缩臂用于在主控单元的控制下沿靠近或远离机体的方向伸缩;高压惰性气体放电组件用于在主控单元的控制下,激发高能脉冲紫外灯发出高能脉冲紫外光。
3、优选地,高铁车厢紫外消杀机器人还包括视觉识别单元,视觉识别单元与主控单元电连接;其中,
4、视觉识别单元,用于采集环境视觉数据并将环境视觉数据发送至主控单元,以便于主控单元驱动伸缩臂、高压惰性气体放电组件和/或高能脉冲紫外灯工作。
5、优选地,伸缩臂为四组,四组伸缩臂沿机体中轴方向两两对称设置在机体的两侧。
6、优选地,每一伸缩臂匹配有两组高能脉冲紫外灯,高能脉冲紫外灯分别设置在该伸缩臂的上下两侧。
7、优选地,高铁车厢紫外消杀机器人还包括移动组件,移动组件设置在机体的底部,移动组件与主控单元电连接,用于在主控单元的驱动下带动机体移动。
8、优选地,主控单元采用stm32f103c8t6型单片机。
9、优选地,伸缩臂包括伸缩驱动单元和伸缩杆,伸缩驱动单元的固定端与机体连接,伸缩驱动单元的输出端与伸缩杆连接。
10、优选地,伸缩臂还包括隔离单元和伸缩驱动接口,隔离单元的受控端与主控单元电连接,隔离单元的输出端通过伸缩驱动接口与伸缩驱动单元连接。
11、优选地,高铁车厢紫外消杀机器人还包括供电单元,供电单元用于给主控单元、伸缩臂、高压惰性气体放电组件和高能脉冲紫外灯供电;其中,供电单元包括依次与7.2v供电电源电连接的az1084型低压差线性稳压器、ib0505ls型隔离电源模块和lm117型低压差电压调节器。
12、优选地,机体设有收纳槽,伸缩臂通过旋转件与机体连接,旋转件与主控单元连接,旋转件用于在主控单元的驱动下转动伸缩臂以使伸缩臂收纳于收纳槽内。
13、有益效果:高能脉冲紫外灯的腔体中填充有惰性气体,高压惰性气体放电组件包括电离电极,电离电极在主控单元的控制下运行,高能脉冲紫外灯的腔体内的惰性气体被电离电极电离击穿后,可产生波长范围为200-280nm的紫外线。将紫外线与高压惰性放电技术结合,使紫外消杀的效率得以提升,同时可扩大杀菌波长范围,覆盖面更广,使消杀效果更好,效率更高,且相对臭氧杀毒而言,对人体安全性较高。同时,主控单元可驱动伸缩臂向远离机体的方向伸展,并驱动高压惰性气体放电组件和高能脉冲紫外灯运行,高压惰性气体放电组件用于在主控单元的控制下,可激发高能脉冲紫外灯发出高能脉冲紫外光,进而可实现对高铁车厢内空间的消杀,由于通过高压惰性气体放电组件,可使高能脉冲紫外灯发射出高能紫外能量,提升了高能脉冲紫外灯的消杀效率,杀菌效果更好,以此解决了现有技术中紫外消毒杀毒效果差和臭氧消毒存在副作用的问题。
14、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
技术特征:
1.一种高铁车厢紫外消杀机器人,其特征在于,包括:机体、主控单元、高压惰性气体放电组件、一个或多个伸缩臂和高能脉冲紫外灯;其中,所述主控单元和所述高压惰性气体放电组件均设置在所述机体内,所述伸缩臂与所述机体连接,所述高能脉冲紫外灯设置在伸缩臂的外壁;所述伸缩臂、高压惰性气体放电组件和高能脉冲紫外灯均与所述主控单元电连接,所述伸缩臂用于在所述主控单元的控制下沿靠近或远离所述机体的方向伸缩;所述高压惰性气体放电组件用于在所述主控单元的控制下,激发所述高能脉冲紫外灯发出高能脉冲紫外光。
2.根据权利要求1所述的一种高铁车厢紫外消杀机器人,其特征在于,所述高铁车厢紫外消杀机器人还包括视觉识别单元,所述视觉识别单元与所述主控单元电连接;其中,所述视觉识别单元,用于采集环境视觉数据并将所述环境视觉数据发送至所述主控单元,以便于所述主控单元驱动所述伸缩臂、高压惰性气体放电组件和/或高能脉冲紫外灯工作。
3.根据权利要求1所述的一种高铁车厢紫外消杀机器人,其特征在于,所述伸缩臂为四组,四组所述伸缩臂沿所述机体中轴方向两两对称设置在所述机体的两侧。
4.根据权利要求3所述的一种高铁车厢紫外消杀机器人,其特征在于,每一所述伸缩臂匹配有两组高能脉冲紫外灯,所述高能脉冲紫外灯分别设置在该伸缩臂的上下两侧。
5.根据权利要求1所述的一种高铁车厢紫外消杀机器人,其特征在于,所述高铁车厢紫外消杀机器人还包括移动组件,所述移动组件设置在所述机体的底部,所述移动组件与所述主控单元电连接,用于在所述主控单元的驱动下带动所述机体移动。
6.根据权利要求1所述的一种高铁车厢紫外消杀机器人,其特征在于,所述主控单元采用stm32f103c8t6型单片机。
7.根据权利要求1所述的一种高铁车厢紫外消杀机器人,其特征在于,所述伸缩臂包括伸缩驱动单元和伸缩杆,所述伸缩驱动单元的固定端与机体连接,所述伸缩驱动单元的输出端与所述伸缩杆连接。
8.根据权利要求7所述的一种高铁车厢紫外消杀机器人,其特征在于,所述伸缩臂还包括隔离单元和伸缩驱动接口,所述隔离单元的受控端与所述主控单元电连接,所述隔离单元的输出端通过所述伸缩驱动接口与所述伸缩驱动单元连接。
9.根据权利要求1所述的一种高铁车厢紫外消杀机器人,其特征在于,所述高铁车厢紫外消杀机器人还包括供电单元,所述供电单元用于给主控单元、伸缩臂、高压惰性气体放电组件和高能脉冲紫外灯供电;其中,所述供电单元包括依次与7.2v供电电源电连接的az1084型低压差线性稳压器、ib0505ls型隔离电源模块和lm117型低压差电压调节器。
10.根据权利要求1所述的一种高铁车厢紫外消杀机器人,其特征在于,所述机体设有收纳槽,所述伸缩臂通过旋转件与所述机体连接,所述旋转件与所述主控单元连接,所述旋转件用于在所述主控单元的驱动下转动所述伸缩臂以使所述伸缩臂收纳于所述收纳槽内。
技术总结
本发明公开了一种高铁车厢紫外消杀机器人,应用于公共场所用消杀设备技术领域。高铁车厢紫外消杀机器人包括:机体、主控单元、一个或多个伸缩臂、高压惰性气体放电组件和高能脉冲紫外灯;其中,主控单元设置在机体内,伸缩臂与机体连接,高能脉冲紫外灯设置在伸缩臂的外壁;伸缩臂、高压惰性气体放电组件和高能脉冲紫外灯均与主控单元电连接,伸缩臂用于在主控单元的控制下沿靠近或远离机体的方向伸缩;高压惰性气体放电组件用于在主控单元的控制下,激发高能脉冲紫外灯发出高能脉冲紫外光。以此解决了现有紫外消毒杀毒效果差和臭氧消毒存在副作用的问题。
技术研发人员:邢奕,叶凯航,耿孟达,姜博,姚琦,王振威,苏伟,岳涛,李国良,温维,吕铭杰,王鑫
受保护的技术使用者:北京科技大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!