机器人超声波手术刀的夹紧力自适应控制系统方法与流程
本发明涉及手术器械,特别涉及一种机器人超声波手术刀的夹紧力自适应控制方法。
背景技术:
1、超声波手术刀(简称:超声刀)是利用超声频率发生器驱动手柄和刀头以超声频率(55.5khz)进行超声振动从而实施手术切割,切割时能使接触的组织细胞内的蛋白氢键断开,使破裂的血管凝固止血,同时实现切割和闭合,因而可靠性强,手术安全性大。目前超声外科手术系统是全球最领先的微创外科手术的基本主要辅助器械,也是全球及中国大中型医院常规的必备医疗设备用品,广泛应用于普通外科、妇产科、泌尿科等手术中。超声波在一定媒介传播时,其会产生力学、热学、声学等响应,超声外科手术系统就是利用超声波的特性对组织产生机械作用、热作用和空化作用,进行相关的组织切割和闭合,从而实现临床的应用。
2、现有的超声刀都是医生通过手扣动扳机来实现前端钳口闭合,而钳口和导杆直接的夹紧力是通过医生扳动扳机的力进行动态调节,同时手柄内部装置有弹簧,从而实现了最大夹紧力的限制,进而保证前端的夹持力不会超过一个限值。也因此,医生可以手动地自适应调节满足临床的不同组织和应用条件下对夹紧力的需求。
3、但是,随着自动化控制的发展,超声刀的手术控制也由机器人来执行。在超声刀接入机器人后,超声刀的夹持等动作,由手术机器人的患者操作台的机械手臂在收到医生工作台的指令后进行间接控制操作,然后通过通讯实现链接,所以整个夹紧力的大小反馈回路就中断了,即医生无法准确感知器械前端的夹持力。
4、目前,机器人现有的夹持力控制方法还是基于固定的电机旋转角度的方式来实现,但没有进行任何力的相关的控制。因此,现有的控制方法在组织量差异较大的情况下,如薄的肌肉或厚的肌肉,末端的夹持力差异将很大,因此需要医生通过视觉的方式去识别组织的变化。特别在一些精细化的手术中,不能更好的发挥超声刀的临床作用。
5、因此,由机器人来控制超声刀有一个不利因素。就是由于医生无法再直接感知手术机器人的末端执行的力,而该超声刀的夹紧力在手术临床应用中是比较重要的控制参数。因为夹紧力太小,会使得手术时间延长,不利于手术的快速进行。夹紧力太大,会使得肌肉组织断裂不是通过超声波切割断的,而是由该超声刀的钳口夹断该肌肉组织,而不是超声切断,使得所述超声刀没有起到其该有的作用。因为当由该超声刀切断时,会在切断的同时起到止血的作用,即超声波同时可以将血管闭合在一起,从而起到止血的效果。
技术实现思路
1、有鉴于此,本发明提供了一种可以解决上述技术问题的机器人超声波手术刀的夹紧力自适应控制系统及控制方法。
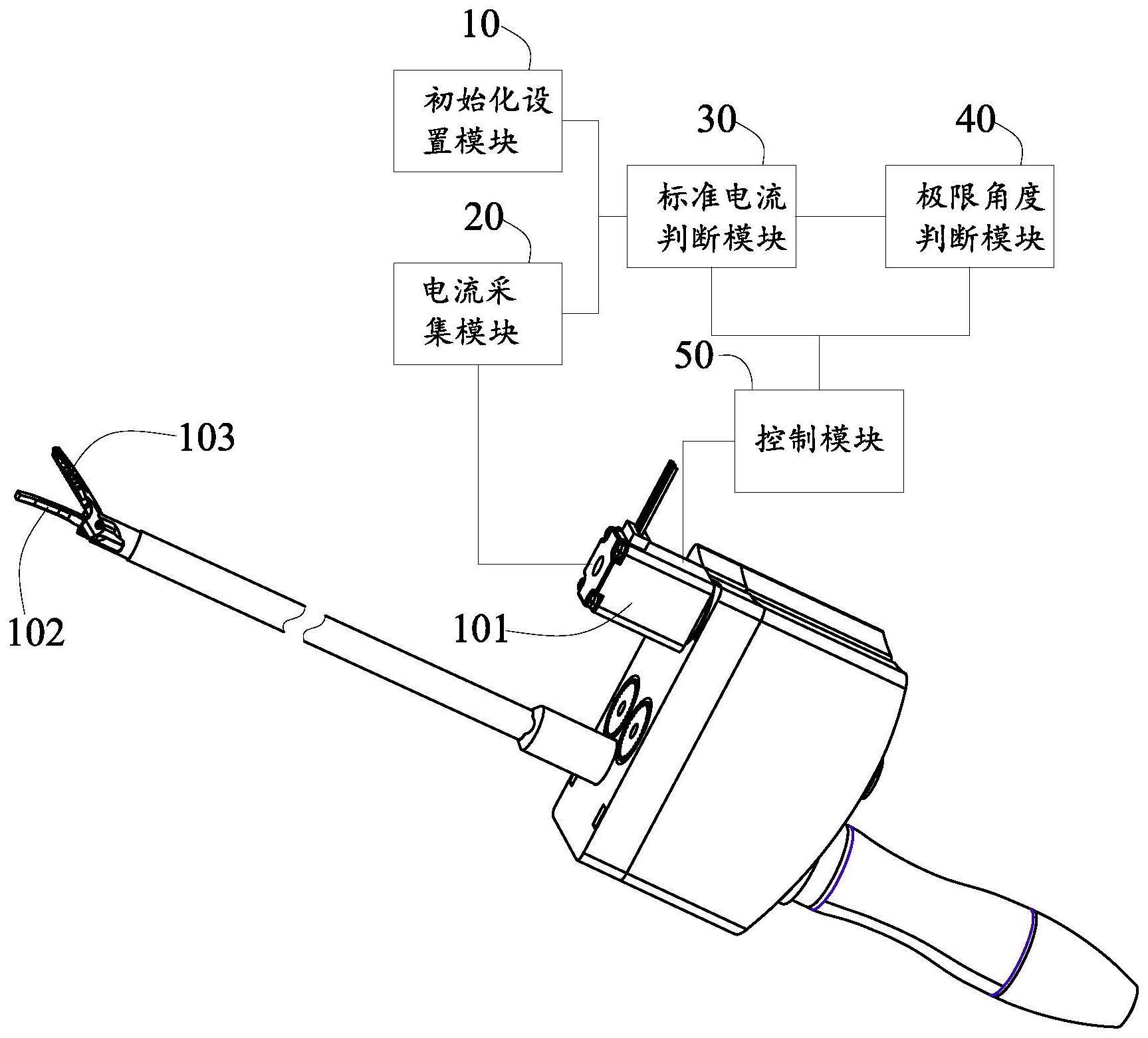
2、一种机器人超声波手术刀的夹紧力自适应控制系统,所述机器人超声波手术刀由一个电机驱动工作。所述机器人超声波手术刀的夹紧力自适应控制系统包括一个初始化设置模块,一个电流采集模块,一个标准电流判断模块,一个极限角度判断模块,以及一个控制模块。所述初始化设置模块用于初始设置所述机器人超声波手术刀的夹紧力转换系数,最大夹紧力,最大电流值,以及超声波手术刀使用时的极限角度。所述夹紧力转换系数用于计算一个电机输出时的转矩与该超声波手术刀的夹紧力之间的对应关系。所述电机用于驱动所述机器人超声波手术刀输出夹紧力。所述最大电流值用于限定电流所能加载的电流最大值且该最大电流值由所述最大紧夹紧力换算得到。所述极限角度用于限定所述超声波手术刀是否完成一次手术切割。所述电流采集模块用于即时采集所述电机所加载的电流的值。所述标准电流判断模块用于判断所采集到的即时电流值是否小于所述最大电流值。当所述即时电流值小于所述最大电流值时所述控制模块驱动所述电机工作。当所述即时电流值大于或等于所述最大电流值时所述控制模块驱动所述电机停止工作。所述极限角度判断模块用于判断所述机器人超声波手术刀是否完成切割工作。当所述极限角度判断模块得出完成切割工作时所述控制模块驱动所述电机停止工作。
3、进一步地,所述夹紧力转换系数由所使用超声波手术刀确定。
4、进一步地,所述夹紧力转换系统由有限次的试验测定。
5、进一步地,所述机器人超声波手术刀具有一个刀杆与一个钳口,该钳口与刀杆合拢时产生的力为所述夹紧力。
6、进一步地,所述极限角度由所述电机的旋转角度确定。
7、进一步地,所述最大夹紧力根据临床经验所得。
8、进一步地,所述最大电流值由所述最大夹紧力换算而得,具体公开如下:
9、fj=kc*tm=kc*kt*ia
10、其中,fj为夹紧力,kc为夹紧力转换系数;tm为转矩,kt为转矩常数,ia为电机电流。
11、进一步地,所述电机上设置有至少两个传感器以分别检测即时电流值和旋转角度。
12、一种机器人超声波手术刀的夹紧力自适应控制方法,其包括如下步骤:
13、step101:提供一个机器人超声波手术刀,以及控制机器人超声波手术刀工作的所述夹紧力自适应控制系统,所述机器人超声波手术刀包括一个电机,所述夹紧力自适应控制系统包括初始化设置模块,电流采集模块,标准电流判断模块,极限角度判断模块,以及控制模块;
14、step102:由所述初始化设置模块来设置所述夹紧力转换系数,最大夹紧力,最大电流值,以及超声波手术刀使用时的极限角度;
15、step103:对所述机器人超声波手术刀进行回归零位;
16、step104:启动所述机器人超波手术刀开始工作,电机开始旋转并转出转矩,同时由所述电流采集模块即时采集所述电机所加载的即时电流值;
17、step105:由所述标准电流判断模块判断所述即时电流值是否大于所述最大电流值;
18、step106:当所述即时电流值大于或等于所述最大电流值时,所述控制模块驱动所述电机停止工作直至所检测到的即时电流值小于所述最大电流值时再启动所述电机继续工作;
19、step107:当所述即时电流值小于所述最大电流值时,由所述极限角度判断模块判断所述电机所转的角度是否等于所述极限角度,当所述电机所转的角度等于所述极限角度,则停止工作,当所述电机所转的角度小于所述极限角度,则控制模块继续驱动所述电机工作。
20、进一步地,所述电机上设置有至少两个传感器以分别检测即时电流值和旋转角度。
21、与现有技术相比,本发明提供的机器人超声波手术刀的夹紧力自适应控制系统通过初始化设置模块,电流采集模块,标准电流判断模块,极限角度判断模块,以及控制模块等多个功能模块的相互配合,使得在所述电机完成其所设置的所要旋转的极限角度后,即可完成一次的超声波切割。在此过程中,电机是走走停停,但保证切断整个肌肉组织的同时,还可以保证肌肉组织内的血管皆被超声波烧结闭合。在切割的过程中,无需更多的仪器的监视,从而可以提高手术的成功率,减少医疗事故的发生。
技术特征:
1.一种机器人超声波手术刀的夹紧力自适应控制系统,所述机器人超声波手术刀由一个电机驱动工作,其特征在于:所述机器人超声波手术刀的夹紧力自适应控制系统包括一个初始化设置模块,一个电流采集模块,一个标准电流判断模块,一个极限角度判断模块,以及一个控制模块,所述初始化设置模块用于初始设置所述机器人超声波手术刀的夹紧力转换系数,最大夹紧力,最大电流值,以及超声波手术刀使用时的极限角度,所述夹紧力转换系数用于计算一个电机输出时的转矩与该超声波手术刀的夹紧力之间的对应关系,所述电机用于驱动所述机器人超声波手术刀输出夹紧力,所述最大电流值用于限定电流所能加载的电流最大值且该最大电流值由所述最大紧夹紧力换算得到,所述极限角度用于限定所述超声波手术刀是否完成一次手术切割,所述电流采集模块用于即时采集所述电机所加载的电流的值,所述标准电流判断模块用于判断所采集到的即时电流值是否小于所述最大电流值,当所述即时电流值小于所述最大电流值时所述控制模块驱动所述电机工作,当所述即时电流值大于或等于所述最大电流值时所述控制模块驱动所述电机停止工作,所述极限角度判断模块用于判断所述机器人超声波手术刀是否完成切割工作,当所述极限角度判断模块得出完成切割工作时所述控制模块驱动所述电机停止工作。
2.如权利要求1所述的机器人超声波手术刀的夹紧力自适应控制系统,其特征在于:所述夹紧力转换系数由所使用超声波手术刀确定。
3.如权利要求2所述的机器人超声波手术刀的夹紧力自适应控制系统,其特征在于:所述夹紧力转换系统由有限次的试验测定。
4.如权利要求1所述的机器人超声波手术刀的夹紧力自适应控制系统,其特征在于:所述机器人超声波手术刀具有一个刀杆与一个钳口,该钳口与刀杆合拢时产生的力为所述夹紧力。
5.如权利要求1所述的机器人超声波手术刀的夹紧力自适应控制系统,其特征在于:所述极限角度由所述电机的旋转角度确定。
6.如权利要求1所述的机器人超声波手术刀的夹紧力自适应控制系统,其特征在于:所述最大夹紧力根据临床经验所得。
7.如权利要求6所述的机器人超声波手术刀的夹紧力自适应控制系统,其特征在于:所述最大电流值由所述最大夹紧力换算而得,具体公开如下:
8.如权利要求6所述的机器人超声波手术刀的夹紧力自适应控制系统,其特征在于:所述电机上设置有至少两个传感器以分别检测即时电流值和旋转角度。
9.一种机器人超声波手术刀的夹紧力自适应控制方法,其包括如下步骤:
10.如权利要求9所述的机器人超声波手术刀的夹紧力自适应控制方法,其特征在于:所述电机上设置有至少两个传感器以分别检测即时电流值和旋转角度。
技术总结
一种机器人超声波手术刀的夹紧力自适应控制系统及方法,所述控制系统包括初始化设置模块,电流采集模块,标准电流判断模块,极限角度判断模块,以及控制模块。所述初始化设置模块用于初始设置所述机器人超声波手术刀的夹紧力转换系数,最大夹紧力,最大电流值,以及超声波手术刀使用时的极限角度。当所述即时电流值小于所述最大电流值时所述控制模块驱动所述电机工作。当所述即时电流值大于或等于所述最大电流值时所述控制模块驱动所述电机停止工作。当所述极限角度判断模块得出完成切割工作时所述控制模块驱动所述电机停止工作。本发控制系统可以保证切断整个肌肉组织的同时,还可以保证肌肉组织内的血管皆被超声波烧结闭合。
技术研发人员:张丽宏,汪超
受保护的技术使用者:嘉善飞阔医疗科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!