一种医用手术机器人控制方法、装置、设备及介质与流程
本公开涉及智能外科,尤其涉及一种医用手术机器人控制方法、装置、设备及介质。
背景技术:
1、通常,机器人手术系统是集多项现代高科技手段于一体的综合体,其用途广泛,在临床外科上有大量的应用。外科医生可以远离手术台操纵机器进行手术,完全不同于传统的手术概念,在世界微创外科领域是当之无愧的革命性外科手术工具。
2、相关技术中,在刀具接近目标体的时候,并没有考虑是否会碰到包裹着骨头的皮肤以及软组织。
技术实现思路
1、为了解决上述技术问题或者至少部分地解决上述技术问题,本公开提供了一种医用手术机器人控制方法、装置、设备及介质。
2、本公开实施例提供了一种医用手术机器人控制方法,在机器人上设置刀具,以及所述机器人的机械臂末端固定一台结构光相机,所述方法包括:
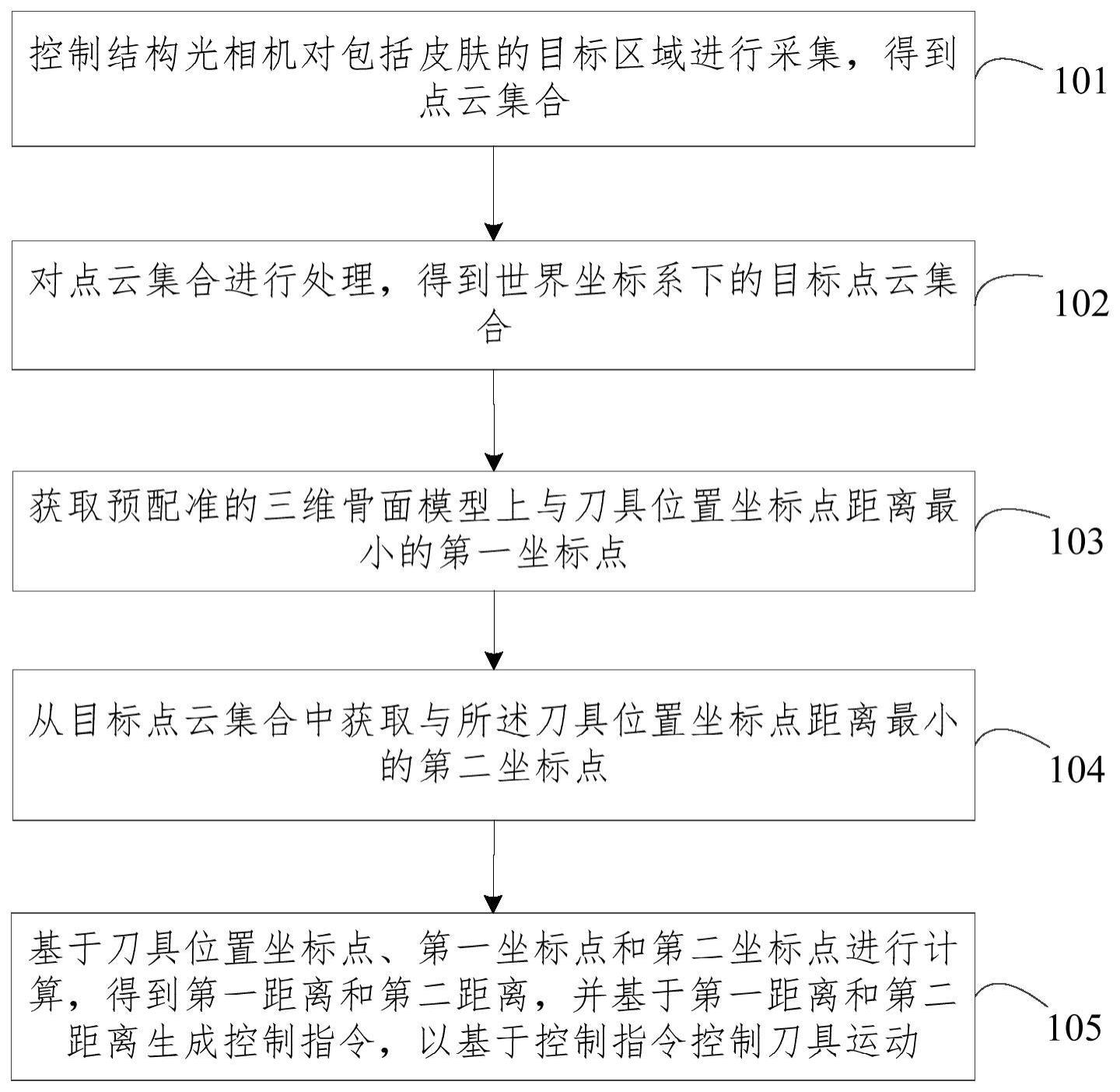
3、控制所述结构光相机对包括皮肤的目标区域进行采集,得到点云集合;
4、对所述点云集合进行处理,得到世界坐标系下的目标点云集合;
5、获取预配准的三维骨面模型上与刀具位置坐标点距离最小的第一坐标点;
6、从所述目标点云集合中获取与所述刀具位置坐标点距离最小的第二坐标点;
7、基于所述刀具位置坐标点、所述第一坐标点和所述第二坐标点进行计算,得到第一距离和第二距离,并基于所述第一距离和所述第二距离生成控制指令,以基于所述控制指令控制所述刀具运动。
8、本公开实施例还提供了一种医用手术机器人控制装置,在机器人设置刀具,以及所述机器人的机械臂末端固定一台结构光相机,所述装置包括:
9、采集模块,用于控制所述结构光相机对包括皮肤的目标区域进行采集,得到点云集合;
10、处理模块,用于对所述点云集合进行处理,得到世界坐标系下的目标点云集合;
11、第一获取模块,用于获取预配准的三维骨面模型上与刀具位置坐标点距离最小的第一坐标点;
12、第二获取模块,用于从所述目标点云集合中获取与所述刀具位置坐标点距离最小的第二坐标点;
13、计算模块,用于基于所述刀具位置坐标点、所述第一坐标点和所述第二坐标点进行计算,得到第一距离和第二距离;
14、生成模块,用于基于所述第一距离和所述第二距离生成控制指令,以基于所述控制指令控制所述刀具运动。
15、本公开实施例还提供了一种电子设备,所述电子设备包括:处理器;用于存储所述处理器可执行指令的存储器;所述处理器,用于从所述存储器中读取所述可执行指令,并执行所述指令以实现如本公开实施例提供的医用手术机器人控制方法。
16、本公开实施例还提供了一种计算机可读存储介质,所述存储介质存储有计算机程序,所述计算机程序用于执行如本公开实施例提供的医用手术机器人控制方法。
17、本公开实施例提供的技术方案与现有技术相比具有如下优点:本公开实施例提供的医用手术机器人控制方案,在机器人上设置刀具,以及所述机器人的机械臂末端固定一台结构光相机,控制结构光相机对包括皮肤的目标区域进行采集,得到点云集合,对点云集合进行处理,得到世界坐标系下的目标点云集合,获取预配准的三维骨面模型上与刀具位置坐标点距离最小的第一坐标点,从目标点云集合中获取与刀具位置坐标点距离最小的第二坐标点,基于刀具位置坐标点、第一坐标点和第二坐标点进行计算,得到第一距离和第二距离,并基于第一距离和第二距离生成控制指令,以基于控制指令控制刀具运动。采用上述技术方案,基于结构光相机实时获取用户体表信息,并利用光线追踪法实现检测用户皮肤软组织并防止刀具碰撞到用户。
技术特征:
1.一种医用手术机器人控制方法,其特征在于,在机器人上设置刀具,以及所述机器人的机械臂末端固定一台结构光相机,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述对所述点云集合进行处理,得到世界坐标系下的目标点云集合,包括:
3.根据权利要求1所述的方法,其特征在于,所述获取预配准的三维骨面模型上与刀具位置坐标点距离最小的第一坐标点,包括:
4.根据权利要求1所述的方法,其特征在于,所述从所述目标点云集合中获取与所述刀具位置坐标点距离最小的第二坐标点,包括:
5.根据权利要求1所述的方法,其特征在于,所述基于所述刀具位置坐标点、所述第一坐标点和所述第二坐标点进行计算,得到第一距离和第二距离,包括:
6.根据权利要求1所述的方法,其特征在于,所述基于所述第一距离和所述第二距离生成控制指令,以基于所述控制指令控制所述刀具运动,包括:
7.一种医用手术机器人控制装置,其特征在于,在机器人设置刀具,以及所述机器人的机械臂末端固定一台结构光相机,所述装置包括:
8.根据权利要求7所述的装置,其特征在于,所述处理模块,具体用于:
9.一种电子设备,其特征在于,所述电子设备包括:
10.一种计算机可读存储介质,其特征在于,所述存储介质存储有计算机程序,所述计算机程序用于执行上述权利要求1-6中任一所述的医用手术机器人控制方法。
技术总结
本公开实施例涉及一种医用手术机器人控制方法、装置、设备及介质,其中,机器人设置刀具,机器人的机械臂末端固定一台结构光相机,方法包括:控制结构光相机对包括皮肤的目标区域进行采集得到点云集合;对点云集合进行处理得到世界坐标系下的目标点云集合;获取预配准的三维骨面模型上与刀具位置坐标点距离最小的第一坐标点;从目标点云集合中获取与刀具位置坐标点距离最小的第二坐标点;基于刀具位置坐标点、第一坐标点和第二坐标点进行计算得到第一距离和第二距离,并基于第一距离和第二距离生成控制指令控制刀具运动。采用上述技术方案,基于结构光相机实时获取用户体表信息,并利用光线追踪法实现检测用户皮肤软组织并防止刀具碰撞到用户。
技术研发人员:胡尊亭,谭润菲,吴斌,刘凤芹
受保护的技术使用者:北京纳通医用机器人科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!