一种口腔导航手术追踪阵列装置及使用方法与流程
本发明涉及机械结构领域,尤其涉及医疗器械,具体为一种口腔导航手术追踪阵列装置及使用方法。
背景技术:
1、目前现有的追踪阵列装置,能够实现追踪阵列的快速锁止、固定。专利号为cn108553186a的专利提供了一种用于口腔的固定装置、牙颌跟踪器及种植导航系统,可以将牙颌跟踪器牢固固定于非种植区牙齿,不易松脱,提高导航精度,但该专利所述装置需要借助专用的工具进行拆卸,且不能调节牙颌跟踪器的角度。
2、因此亟需一种结构简单,并且可以根据实际需求调节角度的口腔导航手术追踪阵列装置。
技术实现思路
1、本发明的目的在于解决上述背景技术中描述的现有技术方案的缺点,提供一种口腔导航手术追踪阵列装置及其使用方法,该装置结构简单,可以根据实际需求快速调节追踪阵列的角度,适应相机识别范围,从而更好地实施机器人口腔导航手术。
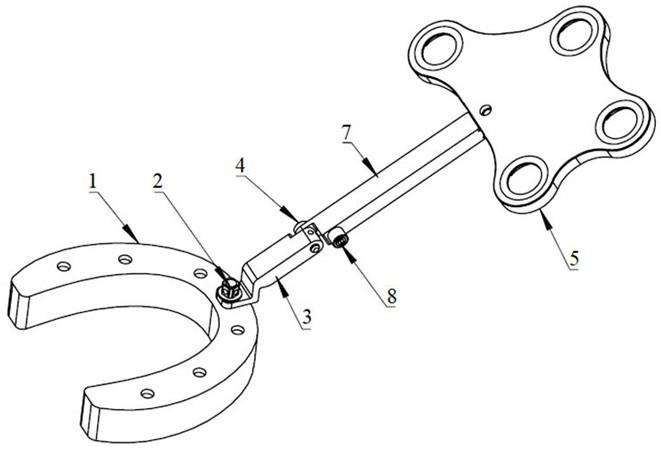
2、本发明通过以下技术方案予以实现:提供一种口腔导航手术追踪阵列装置,该装置包括:牙颌、固定钉、固定杆、转轴件、追踪阵列、相机、阵列杆、锁止件、盖板、伸缩件、弹簧,其中,所述固定杆通过所述固定钉固定在所述牙颌上,所述阵列杆与所述追踪阵列固定,通过所述转轴件、所述伸缩件和所述弹簧的相互配合,可以实现所述追踪阵列的角度调节,调节完成后通过所述锁止件可以实现所述固定杆和所述阵列杆的固定,所述相机可对所述追踪阵列进行识别,实施机器人口腔导航手术。
3、进一步地,所述固定杆的端部具有第一伸出特征。
4、进一步地,所述第一伸出特征的侧面开设有第一限位孔,可供所述转轴件穿过。
5、进一步地,所述第一伸出特征的圆周部开设有多个球形凹槽。
6、进一步地,所述阵列杆侧面具有第二伸出特征,所述第二伸出特征上开设有孔槽,所述转轴件穿过所述孔槽与所述阵列杆固定,所述阵列杆另一侧面具有凸起特征,所述凸起特征为空心圆柱结构,中间空心部分可供所述锁止件穿入。
7、进一步地,所述阵列杆上还开设有凹槽,所述凹槽的侧壁上开设有第二限位孔。
8、进一步地,所述伸缩件一端具有球头特征,所述球头特征可套入所述阵列杆的第二限位孔内,所述伸缩件另一端具有圆柱特征,所述圆柱特征可供所述弹簧穿过。
9、进一步地,所述伸缩件两侧面具有斜面特征,所述锁止件的端部为圆锥形特征,所述圆锥形特征与所述斜面特征的斜面角度相同。
10、进一步地,所述伸缩件装配在所述阵列杆的凹槽中,所述弹簧一端穿过所述伸缩件的圆柱特征顶住所述伸缩件的尾部,另外一端顶住所述阵列杆的凹槽内侧,在所述弹簧的作用下,所述伸缩件球头特征套入所述阵列杆的第二限位孔内,可以沿球头方向在球头受力的时候向内缩,当球头受力释放的时候往外伸出。
11、进一步地,所述盖板与所述阵列杆固定,将所述伸缩件、所述弹簧限位在所述阵列杆的凹槽内,使机构不会脱出。
12、第二方面,本发明还提供一种口腔导航手术追踪阵列装置的使用方法,包括以下步骤:
13、步骤1:将所述固定杆通过所述固定钉固定在所述牙颌上;
14、步骤2:所述转轴件穿过所述固定杆的第一限位孔,将所述追踪阵列与所述固定杆装配在一起,此时所述阵列杆可以相对于所述固定杆旋转,通过所述固定杆圆周部的球形凹槽与所述伸缩件的球头特征的配合,能够根据实际需求调节所述追踪阵列的旋转角度;
15、步骤3:调节完成后将所述锁止件装配在所述阵列杆的侧边凸起特征内,两者通过螺纹进行连接,当所述锁止件的锥形面顶紧所述伸缩杆的斜面时,所述伸缩杆被锁止,其球头伸入在所述固定杆的球形凹槽内,使得所述阵列杆无法旋转,从而实现所述追踪阵列的固定;
16、步骤4:当再次需要调节角度时,将所述锁止件往外侧松脱,所述伸缩杆可以在弹簧方向伸缩,此时所述阵列杆可以进行旋转,达到角度调节的目的,调节完成后再次拧紧所述锁止件实现追踪阵列的固定。
17、步骤5:使用相机对所述追踪阵列进行识别,实施机器人口腔种植牙导航手术。
18、本发明提供了一种口腔导航手术追踪阵列装置及其使用方法,该装置通过所述转轴件、所述伸缩件和所述弹簧的相互配合,可以实现所述追踪阵列的角度调节,调节完成后,通过所述锁止件的圆锥形特征与所述伸缩杆的斜面特征的配合,可以实现所述阵列杆的锁止和解锁,达到角度调节功能关闭和打开的效果。与现有技术相比较,本发明所述装置结构简单,可以根据实际需求快速调节机器人导航口腔种植手术中追踪阵列的角度,适应相机识别范围,从而更好地实施机器人口腔导航手术。
技术特征:
1.一种口腔导航手术追踪阵列装置,其特征在于,包括:牙颌(1)、固定钉(2)、固定杆(3)、转轴件(4)、追踪阵列(5)、相机(6)、阵列杆(7)、锁止件(8)、盖板(9)、伸缩件(10)、弹簧(11),其中,所述固定杆(3)通过所述固定钉(2)固定在所述牙颌(1)上,所述阵列杆(7)与所述追踪阵列(5)固定,通过所述转轴件(4)、所述伸缩件(10)和所述弹簧(11)的相互配合,可以实现所述追踪阵列(5)的角度调节,调节完成后通过所述锁止件(8)可以实现所述固定杆(3)和所述阵列杆(7)的固定,所述相机(6)可对所述追踪阵列(5)进行识别,实施机器人口腔导航手术。
2.根据权利要求1所述的一种口腔导航手术追踪阵列装置,其特征在于,所述固定杆(3)的端部具有第一伸出特征(301)。
3.根据权利要求2所述的一种口腔导航手术追踪阵列装置,其特征在于,所述第一伸出特征(301)的侧面开设有第一限位孔(302),可供所述转轴件(4)穿过。
4.根据权利要求2所述的一种口腔导航手术追踪阵列装置,其特征在于,所述第一伸出特征(301)的圆周部开设有多个球形凹槽。
5.根据权利要求1所述的一种口腔导航手术追踪阵列装置,其特征在于,所述阵列杆(7)侧面具有第二伸出特征(701),所述第二伸出特征(701)上开设有孔槽,所述转轴件(4)穿过所述孔槽与所述阵列杆(7)固定,所述阵列杆(7)另一侧面具有凸起特征(702),所述凸起特征(702)为空心圆柱结构,中间空心部分可供所述锁止件(8)穿入。
6.根据权利要求1所述的一种口腔导航手术追踪阵列装置,其特征在于,所述阵列杆(7)上还开设有凹槽(703),所述凹槽(703)的侧壁上开设有第二限位孔(704)。
7.根据权利要求1所述的一种口腔导航手术追踪阵列装置,其特征在于,所述伸缩件(10)一端具有球头特征,所述球头特征可套入所述阵列杆的第二限位孔(704)内,所述伸缩件(10)另一端具有圆柱特征,所述圆柱特征可供所述弹簧(11)穿过。
8.根据权利要求1所述的一种口腔导航手术追踪阵列装置,其特征在于,所述伸缩件(10)两侧面具有斜面特征,所述锁止件(8)的端部为圆锥形特征,所述圆锥形特征与所述斜面特征的斜面角度相同。
9.根据权利要求1所述的一种口腔导航手术追踪阵列装置,其特征在于,所述伸缩件(10)装配在所述阵列杆的凹槽(703)中,所述弹簧(11)一端穿过所述伸缩件(10)的圆柱特征顶住所述伸缩件(10)的尾部,另外一端顶住所述阵列杆的凹槽(703)内侧,在所述弹簧(11)的作用下,所述伸缩件(10)球头特征套入所述阵列杆的第二限位孔(704)内,可以沿球头方向在球头受力的时候向内缩,当球头受力释放的时候往外伸出。
10.根据权利要求1所述的一种口腔导航手术追踪阵列装置,其特征在于,所述盖板(9)与所述阵列杆(7)固定,将所述伸缩件(10)、所述弹簧(11)限位在所述阵列杆的凹槽(703)内,使机构不会脱出。
11.一种口腔导航手术追踪阵列装置的使用方法,其特征在于,包括以下步骤:
技术总结
本发明提供了一种口腔导航手术追踪阵列装置及其使用方法,该装置包括:牙颌、固定钉、固定杆、转轴件、追踪阵列、相机、阵列杆、锁止件、盖板、伸缩件、弹簧。本发明所述装置通过所述转轴件、所述伸缩件和所述弹簧的相互配合,可以实现所述追踪阵列的角度调节,调节完成后,通过所述锁止件的圆锥形特征与所述伸缩杆的斜面特征的配合,可以实现所述阵列杆的锁止和解锁,达到角度调节功能关闭和打开的效果。与现有技术相比较,本发明所述装置结构简单,可以根据实际需求快速调节机器人导航口腔种植手术中追踪阵列的角度,适应相机识别范围,从而更好地实施机器人口腔导航手术。
技术研发人员:陈盛,荣健,李华卫
受保护的技术使用者:杭州键嘉医疗科技股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!