一种下肢外骨骼气囊控制方法
本发明涉及下肢外骨骼,特别涉及一种下肢外骨骼气囊控制方法。
背景技术:
1、下肢外骨骼是一种穿戴在使用者身体的一种助力装置,能够帮助穿戴者完成保护支撑和行走助力等功能。
2、下肢肌肉损伤常发于老人和高强度运动职业,肌肉损伤后不能正常进行受力活动,而长期卧床的患者由于不能主动进行康复训练,减弱了静脉回流的肌肉弹力作用,容易形成静脉血栓。
3、现有技术中,一般的下肢外骨骼装置可以帮助患者行走,达到对下肢锻炼,刺激患者运动神经和肌肉,起到康复训练的效果,但由于该类人群体力较差,运动时间较短,训练效果有限,大多数时间还是处于卧床状态,康复效果不佳。
技术实现思路
1、针对现有技术的不足,本发明的目的在于提供一种下肢外骨骼气囊控制方法,旨在解决现有技术中康复效果不佳的技术问题。
2、为了实现上述目的,本发明是通过如下技术方案来实现的:一种下肢外骨骼气囊控制方法,包括以下步骤:
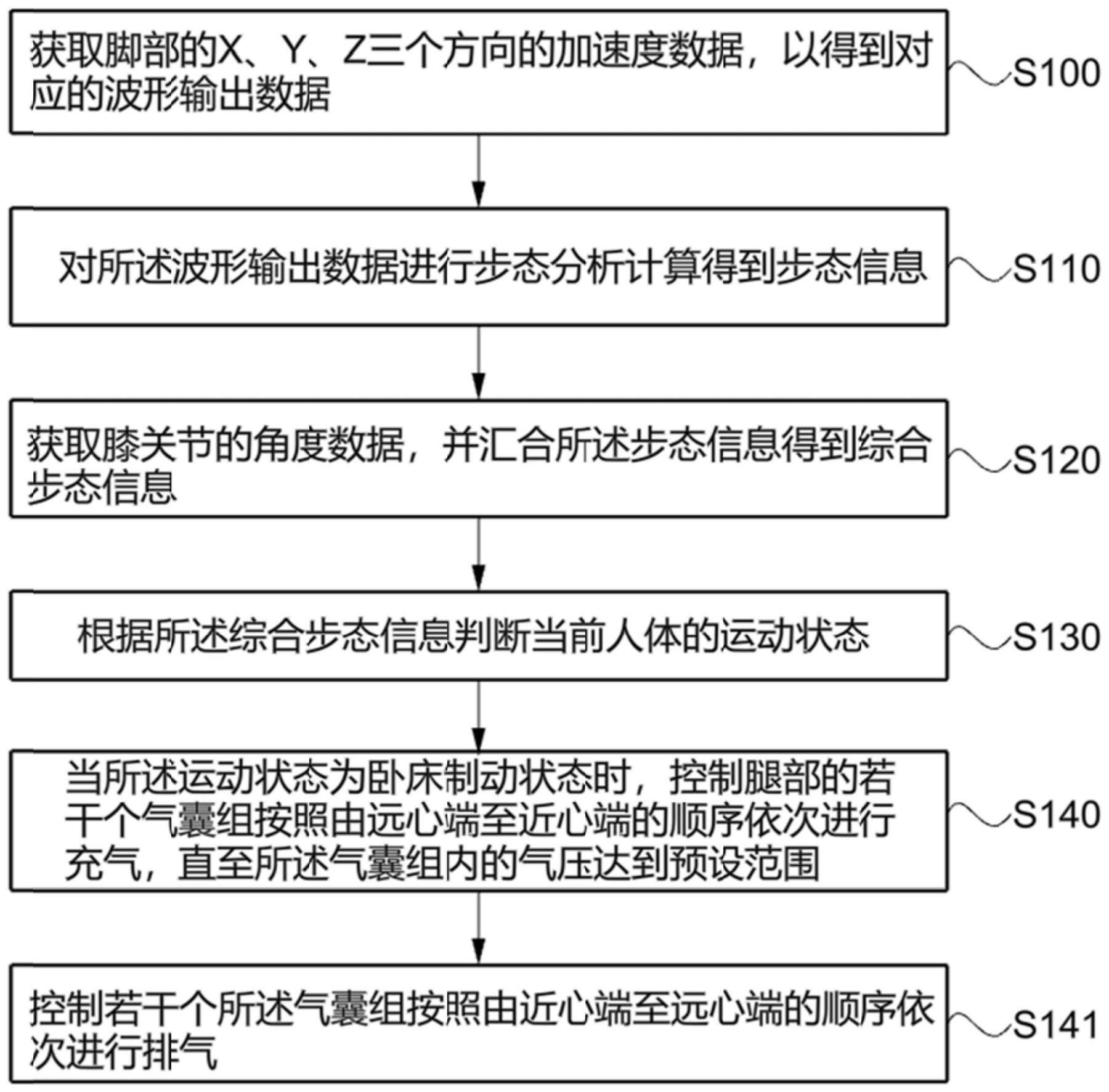
3、获取脚部的x、y、z三个方向的加速度数据,以得到对应的波形输出数据;
4、对所述波形输出数据进行步态分析计算得到步态信息,其中,所述步态信息包括步速及步行周期;
5、获取膝关节的角度数据,并汇合所述步态信息得到综合步态信息;
6、根据所述综合步态信息确定人体的运动状态;
7、当所述运动状态为卧床制动状态时,控制腿部的若干个气囊组按照由远心端至近心端的顺序依次进行充气,直至所述气囊组内的气压达到预设范围后,控制若干个所述气囊组按照由近心端至远心端的顺序依次进行排气。
8、与现有技术相比,本发明的有益效果在于:通过步态信息对人体运动状态进行智能判断,当人体处于卧床制动模式时,通过控制腿部的若干个气囊组由远心端至近心端的顺序依次进行充气,直至所述气囊组内的气压达到预设范围,实现依次对肢体进行波浪式充气、膨胀、放气,具有方向性、渐进性,累积的挤出作用,促进淤积静脉血及淋巴液的回流,加速肢体静脉血流速度,消除水肿,促进血液循环,当气囊组内的气压达到预设范围后,通过控制若干个所述气囊组按照由近心端至远心端的顺序依次进行排气,保证远心端压力高于近心端,利于血液回流,同时气囊循环冲放气,能够模拟对腿部肌肉的物理按摩,能够有效增加静脉血的回流量,减轻心脏回流血的负担,减少腿部静脉瓣异变的可能性,从而提高康复效果。
9、根据上述技术方案的一方面,所述根据所述综合步态信息确定人体的运动状态的步骤具体包括:
10、根据所述步速判断人体状态为动态或静态;
11、当判断所述人体状态为静态后,根据所述加速度数据及所述角度数据判断人体的运动状态;
12、当判断所述运动状态为动态后,根据所述波形输出数据、所述步行周期、所述步速及所述加速度数据判断人体的运动状态。
13、根据上述技术方案的一方面,所述根据所述加速度数据及所述角度数据判断人体的运动状态的步骤具体包括:
14、当x轴向或y轴向的加速度数据的数值大小位于第一预设范围时,判断所述运动状态为卧床制动状态;
15、当z轴向的加速度数据的数值大小位于所述第一预设范围时,判断所述运动状态为站立状态;
16、当所述角度数据位于第二预设范围时,判断所述运动状态为坐下状态。
17、根据上述技术方案的一方面,所述气囊组包括分别设于大腿前后两侧的第一气囊组、第二气囊组,及分别设于小腿前后两侧的第三气囊组及第四气囊组,所述第一气囊组包括第一单腔气囊、第二单腔气囊及第三单腔气囊,所述第二气囊组包括第四单腔气囊、第五单腔气囊、第六单腔气囊及第七单腔气囊,所述第三气囊组包括第八单腔气囊及第九单腔气囊,所述第四气囊组包括第十单腔气囊及第十一单腔气囊;
18、当所述运动状态为卧床制动状态时,首先控制小腿部分的所述第三气囊组及所述第四气囊组的若干个所述单腔气囊按第一预设顺序进行充气,然后控制大腿部分的所述第一气囊组及所述第二气囊组的若干个所述单腔气囊按第二预设顺序进行充气,当全部所述单腔气囊的气压值均达到预设值后,进入保压状态并持续预设时间后,控制全部所述单腔气囊同时排气。
19、根据上述技术方案的一方面,当所述运动状态为站立模式时,控制所述第二气囊组、第三气囊组及所述第四气囊组保持低压保压状态,控制所述第一气囊组的若干个单腔气囊同时充气,达到预设值后进行排气。
20、根据上述技术方案的一方面,当所述运动状态为坐下模式时,首先控制所述第一气囊组及所述第七单腔气囊组按第三预设顺序进行充气直至气压达到预设值,然后控制所述第四气囊组按第四预设顺序充气至预设值后,控制所述第一气囊组及所述第七单腔气囊组排气直至气压达到预设值。
21、根据上述技术方案的一方面,所述根据所述波形输出数据、所述步行周期、所述步速及所述加速度数据判断人体的运动状态的步骤具体包括:
22、当所述步行周期位于第三预设范围内时,判断所述运动状态为步行状态;
23、当所述波形输出数据中波峰的前路程大于所述波峰的后路程时,判断所述运动状态为上楼状态;
24、当z轴向的加速度数据的数值大小小于第一阈值时,判断所述运动状态为下楼状态。
25、根据上述技术方案的一方面,当所述运动状态为步行状态时,控制所述第一气囊组、所述第七单腔气囊及所述第三气囊组同时按第五预设顺序进行充气,当所述第一气囊组、所述第七单腔气囊及所述第三气囊组的压力达到预设值后开始排气,此时控制所述第四气囊组进行充气,当所述第四气囊组的压力达到预设值时排气,并控制所述第四单腔气囊、所述第五单腔气囊及所述第六单腔气囊同时开始充气。
26、根据上述技术方案的一方面,当所述运动状态为上楼状态时,控制处于支撑状态的腿部处的所述第一气囊组、所述第五单腔气囊、所述第七单腔气囊及所述第十单腔气囊充气后排气,控制处于摆动状态的腿部处的所述第七单腔气囊、第九单腔气囊充气后排气。
27、根据上述技术方案的一方面,当所述运动状态为下楼状态时,控制处于支撑状态的腿部处的所述第一气囊组、第九单腔气囊充气后排气,控制处于摆动状态的腿部处的所述第一气囊组、所述第七单腔气囊及所述第九单腔气囊充气后排气。
技术特征:
1.一种下肢外骨骼气囊控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的下肢外骨骼气囊控制方法,其特征在于,根据所述综合步态信息确定人体的运动状态的步骤具体包括:
3.根据权利要求2所述的下肢外骨骼气囊控制方法,其特征在于,所述根据所述加速度数据及所述角度数据判断人体的运动状态的步骤具体包括:
4.根据权利要求1所述的下肢外骨骼气囊控制方法,其特征在于,所述气囊组包括分别设于大腿前后两侧的第一气囊组、第二气囊组,及分别设于小腿前后两侧的第三气囊组及第四气囊组,所述第一气囊组包括第一单腔气囊、第二单腔气囊及第三单腔气囊,所述第二气囊组包括第四单腔气囊、第五单腔气囊、第六单腔气囊及第七单腔气囊,所述第三气囊组包括第八单腔气囊及第九单腔气囊,所述第四气囊组包括第十单腔气囊及第十一单腔气囊;
5.根据权利要求4所述的下肢外骨骼气囊控制方法,其特征在于,当所述运动状态为站立模式时,控制所述第二气囊组、第三气囊组及所述第四气囊组保持低压保压状态,控制所述第一气囊组的若干个单腔气囊同时充气,达到预设值后进行排气。
6.根据权利要求4所述的下肢外骨骼气囊控制方法,其特征在于,当所述运动状态为坐下模式时,首先控制所述第一气囊组及所述第七单腔气囊组按第三预设顺序进行充气直至气压达到预设值,然后控制所述第四气囊组按第四预设顺序充气至预设值后,控制所述第一气囊组及所述第七单腔气囊组排气直至气压达到预设值。
7.根据权利要求2所述的下肢外骨骼气囊控制方法,其特征在于,所述根据所述波形输出数据、所述步行周期、所述步速及所述加速度数据判断人体的运动状态的步骤具体包括:
8.根据权利要求4所述的下肢外骨骼气囊控制方法,其特征在于,
9.根据权利要求4所述的下肢外骨骼气囊控制方法,其特征在于,当所述运动状态为上楼状态时,控制处于支撑状态的腿部处的所述第一气囊组、所述第五单腔气囊、所述第七单腔气囊及所述第十单腔气囊充气后排气,控制处于摆动状态的腿部处的所述第七单腔气囊、第九单腔气囊充气后排气。
10.根据权利要求4所述的下肢外骨骼气囊控制方法,其特征在于,当所述运动状态为下楼状态时,控制处于支撑状态的腿部处的所述第一气囊组、第九单腔气囊充气后排气,控制处于摆动状态的腿部处的所述第一气囊组、所述第七单腔气囊及所述第九单腔气囊充气后排气。
技术总结
本发明提供一种下肢外骨骼气囊控制方法,包括以下步骤:获取脚部的X、Y、Z三个方向的加速度数据,以得到对应的波形输出数据;对波形输出数据进行步态分析计算得到步态信息;获取膝关节的角度数据,得到综合步态信息,根据综合步态信息判断人体的运动状态,并根据运动状态控制气囊进行充放气工作。当人体处于卧床制动模式时,通过控制腿部的若干个气囊组由远心端至近心端的顺序依次进行充气,直至所述气囊组内的气压达到预设范围后排气,实现依次对肢体进行波浪式充气、膨胀、放气,具有方向性、渐进性,累积的挤出作用,促进淤积静脉血及淋巴液的回流,加速肢体静脉血流速度,消除水肿,促进血液循环,提高康复效果。
技术研发人员:刘星语,李秀军,蒋天琦,郝亮,曾新星,徐州,汪勇波
受保护的技术使用者:南昌大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!