一种医用介入手术臂托的制作方法
1.本实用新型涉及医疗辅助器材技术领域,尤其涉及一种医用介入手术臂托。
背景技术:
2.一般综合性医院外科有骨科、神经外科、心胸外科、泌尿外科等,在治疗过程介入手术越来越普遍,外科手术需要极高的精准度和准确性,尤其是遇到显微手术时,手术视野窄,手术过程中,医生双手常处于悬臂、悬腕状态,这样很容易疲劳,且由于没有支撑,医生的手臂不稳定,略有闪失则会严重影响手术效果。
3.目前市场上的神经外科医生手术臂托无法进行臂托的多角度调节,仅仅只可以进行平面移动调节,不便于医生的手臂摆动角度的适应,手臂摆放舒适度较低,为此是本领域人员所急需解决的技术问题。
技术实现要素:
4.为了克服臂托无法进行臂托的多角度调节的缺点,本实用新型的技术问题是:提供一种便于医生的手臂摆动角度自适应的医用介入手术臂托。
5.一种医用介入手术臂托,包括有导杆和滑套组件,滑套组件一侧铰接有连杆机构,连杆机构包括有相互铰接的第一连杆和第二连杆;平衡机构,第二连杆一侧顶部设置有平衡机构;平衡机构包括:弹性件,第二连杆一侧顶部开有沉孔,沉孔内设置有弹性件;导座,弹性件顶部设置有导座;滑轮组件,导座顶部通过旋转销可旋转式设置有滑轮组件;滑动套,第二连杆一侧的台柱外表面滑动式设置有滑动套,滑轮组件通过销与滑动套的滑槽上下滑动配合;平衡角,滑动套顶部可转动式设置有平衡角,平衡角与滑轮滚动压紧配合;臂托,平衡角顶部固接有臂托。
6.进一步说明,所述滑套组件包括有滑套,导杆上滑动式设置有滑套;夹紧旋钮,滑套一侧设置有夹紧旋钮;铰接座,滑套另一侧设置有铰接座,铰接座与第一连杆连接。
7.进一步说明,还包括有夹持座,导杆底部设置有夹持座,滑动连接手术台面的固定杆。
8.进一步说明,还包括有限位夹,第二连杆32圆筒外表面套接有,限位夹与滑动套45平齐,用于固定滑动套45,进而限制臂托上下移动。
9.本实用新型的有益效果为:1、通过导杆和滑套组件实现滑动升降固定,并通过连杆机构的相互铰接实现全方位的转动和延伸、缩短。
10.2、臂托跟随手臂向一侧倾斜,带动滑轮向下运动进而带动导座进一步压缩弹性件,在力的相互作用下,使得医生的手臂在倾斜状态时也具有支撑,实现摆动角度自适应,便于医生找到合适的手术角度,增加了医生手术过程中的舒适度。
11.3、平衡机构具有自平衡效果,通过平衡角和滑轮组件的滚动压紧配合并在弹性件的弹力作用下回复到平衡状态。
附图说明
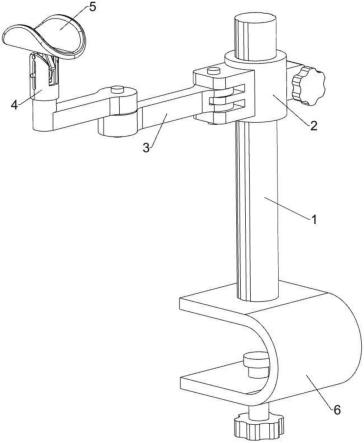
12.图1为本实用新型立体结构示意图。
13.图2为本实用新型连杆机构的立体结构示意图。
14.图3为本实用新型的平衡机构爆炸图。
15.图4为本实用新型的平衡机构立体结构示意图。
16.附图中的标记:1:导杆,2:滑套组件,21:滑套,22:夹紧旋钮,23:铰接座,3:连杆机构,31:第一连杆,32:第二连杆,4:平衡机构,41:弹性件,42:导座,43:滑轮组件,44:旋转销,45:滑动套,46:平衡角,5:臂托,6:夹持座。
具体实施方式
17.下面结合附图和实施例对本实用新型作进一步的说明。
18.实施例
19.如图1-4所示,一种医用介入手术臂托,包括有导杆1和滑套21组件2,滑套21组件2一侧铰接有连杆机构3,连杆机构3包括有相互铰接的第一连杆31和第二连杆32;所述滑套21组件2包括有滑套21,导杆1上滑动式设置有滑套21;夹紧旋钮22,滑套21一侧设置有夹紧旋钮22;铰接座23,滑套21另一侧设置有铰接座23,铰接座23与第一连杆31连接。
20.本实用新型通过导杆1和滑套21组件2实现滑动升降固定,并通过连杆机构3的相互铰接实现全方位的转动和延伸、缩短。手术前,外科医生可将本装置固定于手术台面的固定杆,即可完全覆盖手术范围。
21.还包括有平衡机构4,第二连杆32一侧顶部设置有平衡机构4;平衡机构4包括:弹性件41,第二连杆32一侧顶部开有沉孔,沉孔内设置有弹性件41;导座42,弹性件41顶部设置有导座42;滑轮组件43,导座42顶部通过旋转销44可旋转式设置有滑轮组件43;滑动套45,第二连杆32一侧的台柱外表面滑动式设置有滑动套45,滑轮组件43通过销与滑动套45的滑槽上下滑动配合;平衡角46,滑动套45顶部可转动式设置有平衡角46,平衡角46与滑轮滚动压紧配合;臂托5,平衡角46顶部固接有臂托5。
22.在手术中,医生将手臂置于臂托5上,通过平衡机构4将力传递到弹性件41,使得医生的手臂有支撑的感觉反馈,当医生的手臂在进行手术中有角度摆动的倾斜状态时,臂托5跟随手臂向一侧倾斜,从而带动平衡角46向一侧倾斜,平衡角46的一侧向下运动带动滑轮向下运动进而带动导座42进一步压缩弹性件41,在力的相互作用下,使得医生的手臂在倾斜状态时也具有支撑,降低手臂疲劳,保证手术的精准度。此外,平衡机构4具有自平衡效果,使得医生的手臂在不用力(用力轻微)的状态下,通过平衡角46和滑轮组件43的滚动压紧配合并在弹性件41的弹力作用下回复到平衡状态。另一方面,平衡机构4中的通过旋转销44可整体旋转臂托5方向,便于活动。实现医生的手臂全方位活动支撑,摆动角度自适应,便于医生找到合适的手术角度,增加了医生手术过程中的舒适度。
23.还包括有夹持座6,导杆1底部设置有夹持座6,滑动连接手术台面的固定杆。
24.还包括有限位夹,第二连杆32圆筒外表面套接有,限位夹与滑动套45平齐,用于固定滑动套45,进而限制臂托上下移动。此时还可用于对患者的手臂进行固定、抬升,便于医生操作。本实用新型结构设计合理,实用性强,适合大范围推广。
25.虽然已经参照示例性实施例描述了本实用新型,但是应理解本实用新型不限于所
公开的示例性实施例。以下权利要求的范围应给予最宽泛的解释,以便涵盖所有的变型以及等同的结构和功能。
技术特征:
1.一种医用介入手术臂托,包括有导杆(1)和滑套(21)组件(2),滑套(21)组件(2)一侧铰接有连杆机构(3),连杆机构(3)包括有相互铰接的第一连杆(31)和第二连杆(32);其特征是:第二连杆(32)一侧顶部开有沉孔,沉孔内设置有弹性件(41);所述弹性件(41)顶部设置有导座(42);所述导座(42)顶部通过旋转销(44)可旋转式设置有滑轮组件(43);所述第二连杆(32)一侧的台柱外表面滑动式设置有滑动套(45),滑轮组件(43)通过销与滑动套(45)的滑槽上下滑动配合;所述滑动套(45)顶部可转动式设置有平衡角(46),平衡角(46)与滑轮压紧滚动配合;所述平衡角(46)顶部固接有臂托(5)。2.按照权利要求1所述的一种医用介入手术臂托,其特征是:所述滑套(21)组件(2)包括有滑套(21),导杆(1)上滑动式设置有滑套(21);滑套(21)一侧设置有夹紧旋钮(22);滑套(21)另一侧设置有铰接座(23),铰接座(23)与第一连杆(31)连接。3.按照权利要求2所述的一种医用介入手术臂托,其特征是:还包括有夹持座(6),导杆(1)底部设置有夹持座(6),滑动连接手术台面的固定杆。
技术总结
本实用新型涉及医疗辅助器材技术领域,尤其涉及一种医用介入手术臂托。本实用新型提供一种便于医生的手臂摆动角度自适应的医用介入手术臂托。一种医用介入手术臂托,包括:导杆和滑套组件,滑套组件一侧铰接有连杆机构,连杆机构包括有相互铰接的第一连杆和第二连杆;平衡机构,第二连杆一侧顶部设置有平衡机构;平衡机构包括有弹性件,第二连杆一侧顶部开有沉孔,沉孔内设置有弹性件;导座,弹性件顶部设置有导座。通过导杆和滑套组件实现滑动升降固定,并通过连杆机构的相互铰接实现全方位的转动和延伸、缩短。缩短。缩短。
技术研发人员:杨双艳 王水华
受保护的技术使用者:杨双艳
技术研发日:2022.04.11
技术公布日:2022/12/16
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1