自适应的支撑装置及手术系统的制作方法
本技术涉及医疗器械,尤其涉及一种自适应的支撑装置及手术系统。
背景技术:
1、微创手术是指利用腹腔镜、胸腔镜等现代医疗器械及相关设备在人体腔体内部施行手术的一种手术方式。相比传统手术方式,微创手术具有创伤小、疼痛轻、恢复快等优势。
2、随着微创手术技术与人工智能技术的发展,机器人辅助微创手术逐渐成为微创外科手术的发展趋势之一。微创手术可以通过患者身体表面的自然孔口或通过一个或多个外科手术切口实施。通过这些自然孔口或切口,医生可以将微创医疗器械,如外科手术器械、诊断器械、治疗器械或活检器械等插入到达患者体内的目标位置。
3、为了精确引导相应的微创医疗器械到达目标位置,微创手术可以为微创医疗器械配备有内窥镜,内窥镜允许器械在插入、拔出或执行医疗程序的过程中为医生提供显示有组织、器官和/或器械的视野。例如,利用支气管内窥镜进行检查的过程中,内窥镜所在的细长柔性工具可以被插入到患者口中,经过患者喉咙依次进入气管、肺气道、肺部,以允许医生检查患者肺气道例如支气管和细支气管的内部状况,以便医生进行诊断和/或医疗程序。
4、内窥镜等手术工具通常被配置于不同的细长柔性工具的远端,细长柔性工具被从患者的体外驱动而在体内例如狭小腔道内根据需要发生形变。但是,细长柔性工具位于体外的部分一般较长,当细长柔性工具的远端受到腔道的阻尼作用无法继续前进或前进速度减缓时,其位于体外的部分则会难以避免地出现拱起现象,这将导致系统无法精确地获取细长柔性工具远端在体内的位置,影响手术导航精度。
技术实现思路
1、鉴于现有技术的不足,本实用新型提供了一种自适应的支撑装置及手术系统,可以避免细长柔性工具在体外拱起,有利于保证手术导航的精度。
2、为了实现上述的目的,本实用新型采用了如下的技术方案:
3、一种自适应的支撑装置,用于轴向支撑医疗器械,包括至少两个张紧带、张紧机构和连接环,所述张紧机构包括保持架以及设于所述保持架上的张紧组件与可转动的导向轮;所述保持架包括贯穿其轴向的导向通道,各所述张紧带围成用于包围医疗器械的限位通道,所述限位通道的两端分别正对两端的所述导向通道、所述连接环;各所述张紧带一端连接所述张紧组件,另一端经所述导向轮导向后连接所述连接环的周向上的不同部位;所述张紧组件被配置为收放并张紧与之连接的所述张紧带,以限制所述限位通道内的医疗器械拱起。
4、作为其中一种实施方式,所述保持架还包括贯穿所述导向通道内壁的侧孔;
5、所述导向轮通过第二转轴可转动地设置在所述保持架上,且至少部分所述导向轮位于所述侧孔和/或所述导向通道内,所述张紧组件上的所述张紧带由所述导向轮导向后经所述侧孔进入所述导向通道。
6、作为其中一种实施方式,所述张紧组件包括张紧轮和卷簧,所述张紧轮可转动地设置在所述保持架上,所述卷簧的一个自由端连接所述张紧轮,所述卷簧的另一个自由端连接所述保持架,每个所述张紧带缠绕在一个所述张紧轮的外周面,由所述卷簧的弹性回复力张紧。
7、作为其中一种实施方式,所述张紧轮包括一体设置的轮体和第一转轴,所述卷簧设于所述轮体与所述保持架之间,其内圈固定在所述第一转轴上,其外圈固定在所述保持架上,所述第一转轴与所述保持架转动连接。
8、作为其中一种实施方式,所述保持架包括端盖,所述轮体的朝向所述卷簧的一端敞口设置,所述第一转轴活动地穿过所述端盖,所述端盖与所述轮体围成将所述卷簧容纳于其中的空腔。
9、作为其中一种实施方式,所述保持架包括与所述张紧带数量一致的安装架,各所述安装架在所述保持架的周向上间隔地设置;每个所述安装架上可转动地设有一个所述导向轮和一个所述张紧组件,所述张紧组件相对于所述导向轮位于更靠近所述保持架的径向外侧。
10、作为其中一种实施方式,所述保持架还包括可供把持的把手部,每两个相邻的所述安装架之间连接有一个所述把手部。
11、作为其中一种实施方式,所述保持架还包括朝向所述连接环所在侧延伸出的凸缘,所述连接环可选择性地进入所述凸缘内。
12、作为其中一种实施方式,所述自适应的支撑装置还包括拉簧,所述拉簧的两端分别连接所述张紧机构和所述连接环,且套设于所述张紧机构和所述连接环之间的所述限位通道外。
13、本实用新型的另一目的在于提供一种手术系统,包括至少一个上述的支撑装置和医疗器械,所述医疗器械至少部分穿过所述至少一个支撑装置的所述限位通道,并由所述支撑装置进行径向限位。
14、作为其中一种实施方式,所述手术系统还包括:
15、第一机械臂;
16、第二机械臂;
17、所述医疗器械包括第一器械和第二器械,所述第一器械包括第一驱动器和第一细长器械,所述第二器械包括第二驱动器和第二细长器械,所述第二细长器械具有可供所述第一细长器械穿过的中空的器械通道;
18、所述支撑装置的其中一个被配置为在所述第一细长器械穿过其限位通道进入所述器械通道后,两端分别与所述第一驱动器、所述第二驱动器相对固定,以在所述第一驱动器、所述第二驱动器分别安装到所述第一机械臂、所述第二机械臂后,随所述第一机械臂与所述第二机械臂之间的距离变化而伸缩。
19、作为其中一种实施方式,所述支撑装置的其中另一个被配置为一端与所述第二驱动器相对固定,另一端与手术床相对固定,且所述第二细长器械穿设于所述支撑装置的所述其中另一个的所述限位通道内,所述支撑装置的所述其中另一个随所述第二机械臂与所述手术床之间的距离变化而伸缩。
20、作为其中一种实施方式,所述第一驱动器上用于与所述第一机械臂接合的第一接口和所述第二驱动器上用于与所述第二机械臂接合的第二接口相同,所述第二机械臂可选择性地与所述第一接口、所述第二接口接合以传递扭矩。
21、作为其中一种实施方式,所述第一机械臂的各个关节处的转轴互相平行,所述第二机械臂的各个关节处的转轴互相平行,且所述第一机械臂的转轴与所述第二机械臂的转轴互相平行。
22、作为其中一种实施方式,所述手术系统还包括第二机械臂;
23、所述医疗器械包括第一器械,所述第一器械包括第一驱动器和第一细长器械;
24、所述支撑装置的其中一个被配置为一端与所述第一驱动器相对固定,另一端与手术床相对固定,以在所述第一驱动器安装到所述第二机械臂后,随所述第二机械臂与所述手术床之间的距离变化而伸缩。
25、本实用新型提供的支撑装置可以在手术过程中对医疗器械位于人体外的部分进行径向限位并避免其拱起,有利于保证手术导航的精度。
技术特征:
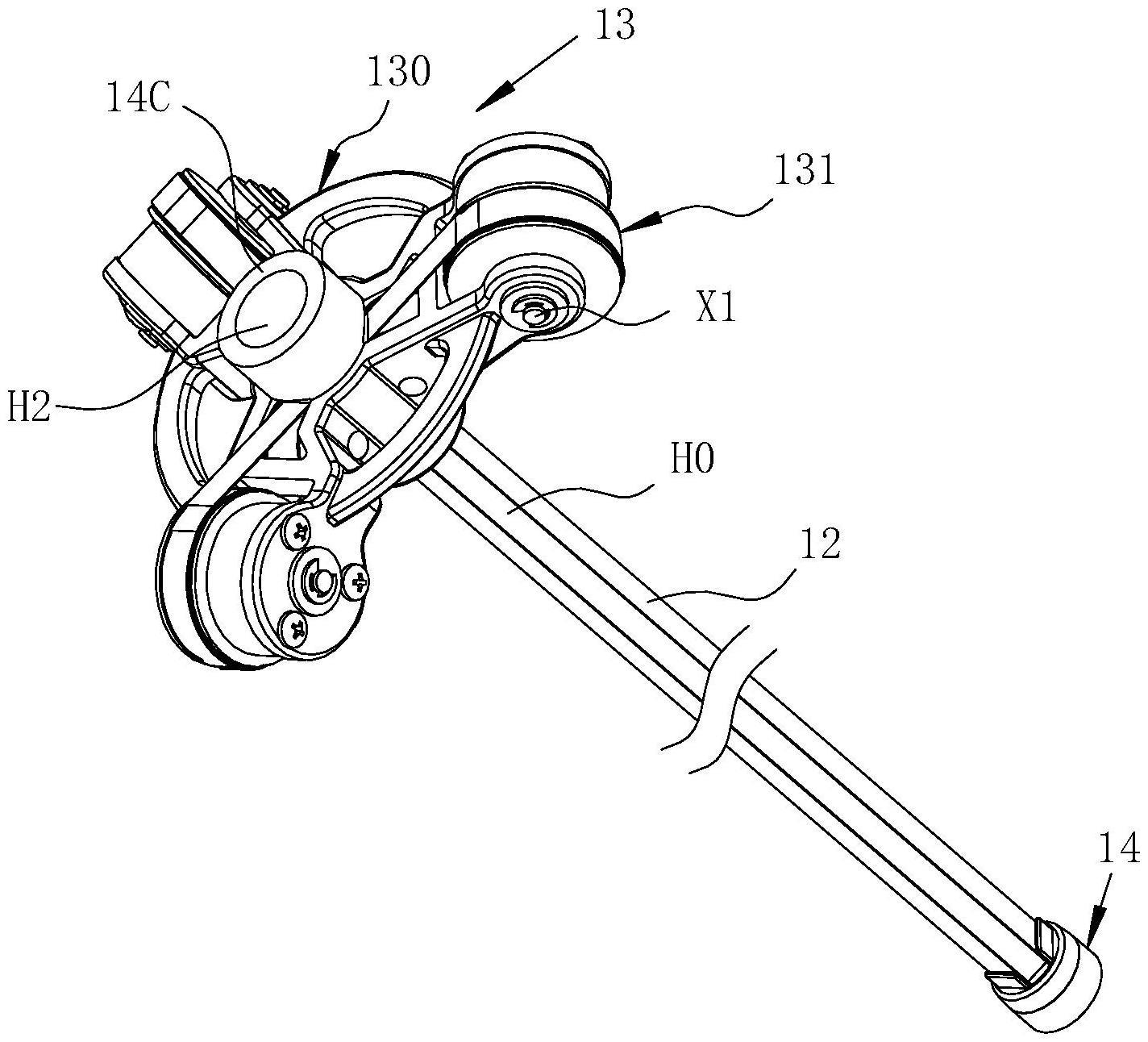
1.一种自适应的支撑装置,用于轴向支撑医疗器械,其特征在于,包括至少两个张紧带(12)、张紧机构(13)和连接环(14),所述张紧机构(13)包括保持架(130)以及设于所述保持架(130)上的张紧组件(131)与可转动的导向轮(132);所述保持架(130)包括贯穿其轴向的导向通道(h2),各所述张紧带(12)围成用于包围医疗器械的限位通道(h0),所述限位通道(h0)的两端分别正对所述导向通道(h2)、所述连接环(14);各所述张紧带(12)一端连接所述张紧组件(131),另一端经所述导向轮(132)导向后连接所述连接环(14)的周向上的不同部位;所述张紧组件(131)被配置为收放并张紧与之连接的所述张紧带(12),以限制所述限位通道(h0)内的医疗器械拱起。
2.根据权利要求1所述的自适应的支撑装置,其特征在于,所述保持架(130)还包括贯穿所述导向通道(h2)内壁的侧孔(h3);
3.根据权利要求1所述的自适应的支撑装置,其特征在于,所述张紧组件(131)包括张紧轮(131a)和卷簧(131b),所述张紧轮(131a)可转动地设置在所述保持架(130)上,所述卷簧(131b)的一个自由端连接所述张紧轮(131a),所述卷簧(131b)的另一个自由端连接所述保持架(130),所述张紧带(12)缠绕在所述张紧轮(131a)的外周面,由所述卷簧(131b)的弹性回复力张紧。
4.根据权利要求3所述的自适应的支撑装置,其特征在于,所述张紧轮(131a)包括一体设置的轮体(1301)和第一转轴(x1),所述卷簧(131b)设于所述轮体(1301)与所述保持架(130)之间,其内圈固定在所述第一转轴(x1)上,其外圈固定在所述保持架(130)上,所述第一转轴(x1)与所述保持架(130)转动连接。
5.根据权利要求4所述的自适应的支撑装置,其特征在于,所述保持架(130)包括端盖(1302),所述轮体(1301)的朝向所述卷簧(131b)的一端敞口设置,所述第一转轴(x1)活动地穿过所述端盖(1302),所述端盖(1302)与所述轮体(1301)围成将所述卷簧(131b)容纳于其中的空腔(1300)。
6.根据权利要求2所述的自适应的支撑装置,其特征在于,所述保持架(130)包括与所述张紧带(12)数量一致的安装架(1310),各所述安装架(1310)在所述保持架(130)的周向上间隔地设置;每个所述安装架(1310)上可转动地设有一个所述导向轮(132)和一个所述张紧组件(131),所述张紧组件(131)相对于所述导向轮(132)位于更靠近所述保持架(130)的径向外侧。
7.根据权利要求6所述的自适应的支撑装置,其特征在于,所述保持架(130)还包括可供把持的把手部(1311),每两个相邻的所述安装架(1310)之间连接有一个所述把手部(1311)。
8.根据权利要求1所述的自适应的支撑装置,其特征在于,所述保持架(130)还包括朝向所述连接环(14)所在侧延伸出的凸缘(1312),所述连接环(14)可选择性地进入所述凸缘(1312)内。
9.根据权利要求1~8任一所述的自适应的支撑装置,其特征在于,还包括拉簧(s),所述拉簧(s)的两端分别连接所述张紧机构(13)和所述连接环(14),且套设于所述张紧机构(13)和所述连接环(14)之间的所述限位通道(h0)外。
10.一种手术系统,其特征在于,包括至少一个权利要求1~9任一所述的支撑装置和医疗器械,所述医疗器械至少部分穿过所述至少一个支撑装置的所述限位通道(h0),并由所述支撑装置进行径向限位。
11.根据权利要求10所述的手术系统,其特征在于,还包括:
12.根据权利要求11所述的手术系统,其特征在于,所述支撑装置的其中另一个被配置为一端与所述第二驱动器(420)相对固定,另一端与手术床(60)相对固定,且所述第二细长器械(421)穿设于所述支撑装置的所述其中另一个的所述限位通道(h0)内,所述支撑装置的所述其中另一个随所述第二机械臂(32)与所述手术床之间的距离变化而伸缩。
13.根据权利要求10所述的手术系统,其特征在于,还包括第二机械臂(32);
技术总结
本技术提供了一种自适应的支撑装置及手术系统,支撑装置用于轴向支撑医疗器械,包括至少两个张紧带、张紧机构和连接环,张紧机构包括保持架以及设于所述保持架上的张紧组件与可转动的导向轮;所述保持架包括贯穿其轴向的导向通道,各张紧带围成用于包围医疗器械的限位通道,限位通道的两端分别正对所述导向通道、所述连接环;各张紧带一端连接所述张紧组件,另一端经所述导向轮导向后连接所述连接环的周向上的不同部位;所述张紧组件被配置为收放并张紧与之连接的所述张紧带,以限制所述限位通道内的医疗器械拱起。本技术提供的支撑装置可以在手术过程中对医疗器械位于人体外的部分进行径向限位并避免其拱起,有利于保证手术导航的精度。
技术研发人员:刘放,王建辰
受保护的技术使用者:深圳市精锋医疗科技股份有限公司
技术研发日:20220825
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!