一种运动姿态穿戴智能矫正器的制作方法
本技术涉及矫正器,具体为一种运动姿态穿戴智能矫正器。
背景技术:
1、随着生活条件的提高,人们对运动越来越重视,运动可强身健体,提高人体的免疫力,但是运动时需要按照标准的姿势,不规范的姿势会起到反作用,比如,头需要摆正姿势,运动时不可前倾、歪头,因此,我们提出了一种运动姿态穿戴智能矫正器。
技术实现思路
1、本实用新型旨在解决现有技术或相关技术中存在的技术问题之一。
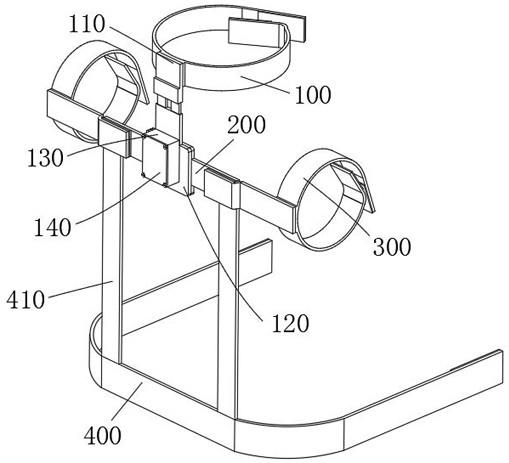
2、为此,本实用新型所采用的技术方案为:一种运动姿态穿戴智能矫正器,包括颈带、连接带和臂带,所述颈带的前端设置有拉力传感器,所述拉力传感器的底端设置有第一固定带,所述第一固定带的前端设置有控制盒,所述控制盒的内壁依次设置有微型振动电机和微控制器,所述连接带缝制在第一固定带的后侧,所述连接带的前端对称设置有两个第二魔术贴勾面,所述臂带的前端设置有第二固定带,所述第二固定带的后侧设置有第二魔术贴毛面。
3、优选的,所述颈带上设置有第一魔术贴勾面和第一魔术贴毛面。
4、优选的,所述控制盒的前端螺钉连接有密封盖。
5、优选的,所述微控制器与拉力传感器和微型振动电机电性连接。
6、优选的,所述臂带上设置有第三魔术贴勾面和第三魔术贴毛面。
7、优选的,所述臂带设置有两个,两个所述臂带对称排布。
8、优选的,还包括腹带,所述腹带上设置有第四魔术贴勾面和第四魔术贴毛面。
9、优选的,所述腹带的顶端对称设置有两个第三固定带,两个所述第三固定带的顶端与连接带固定连接。
10、通过采用上述技术方案,本实用新型所取得的有益效果为:本实用设置的颈带可固定在脖颈上,而连接带可连接两个臂带,然后通过两个臂带可将连接带固定在手臂上,即可完成穿戴,当头部低头、歪头时,设置的拉力传感器可感受到一定的拉力,并反馈给微控制器,微控制器接收到信号后可控制微型振动电机工作,微型振动电机会产生振动,即可提醒人们需要纠正头的姿态,便于使用,然后设置的腹带可通过第四魔术贴勾面和第四魔术贴毛面的粘结可固定在腹部,即可通过腹带、臂带和连接带的配合可纠正背部的姿态,实现了一物多用的效果。
技术特征:
1.一种运动姿态穿戴智能矫正器,其特征在于,包括:
2.根据权利要求1所述的一种运动姿态穿戴智能矫正器,其特征在于,所述颈带(100)上设置有第一魔术贴勾面(150)和第一魔术贴毛面(160)。
3.根据权利要求1所述的一种运动姿态穿戴智能矫正器,其特征在于,所述控制盒(130)的前端螺钉连接有密封盖(140)。
4.根据权利要求1所述的一种运动姿态穿戴智能矫正器,其特征在于,所述微控制器(180)与拉力传感器(110)和微型振动电机(170)电性连接。
5.根据权利要求1所述的一种运动姿态穿戴智能矫正器,其特征在于,所述臂带(300)上设置有第三魔术贴勾面(310)和第三魔术贴毛面(320)。
6.根据权利要求1所述的一种运动姿态穿戴智能矫正器,其特征在于,所述臂带(300)设置有两个,两个所述臂带(300)对称排布。
7.根据权利要求1所述的一种运动姿态穿戴智能矫正器,其特征在于,还包括腹带(400),所述腹带(400)上设置有第四魔术贴勾面(410)和第四魔术贴毛面(420)。
8.根据权利要求7所述的一种运动姿态穿戴智能矫正器,其特征在于,所述腹带(400)的顶端对称设置有两个第三固定带(430),两个所述第三固定带(430)的顶端与连接带(200)固定连接。
技术总结
本技术公开了一种运动姿态穿戴智能矫正器,本技术包括颈带、连接带和臂带,颈带的前端设置有拉力传感器,拉力传感器的底端设置有第一固定带,第一固定带的前端设置有控制盒,控制盒的内壁依次设置有微型振动电机和微控制器,连接带缝制在第一固定带的后侧,臂带的前端设置有第二固定带。在本技术中,设置的颈带可固定在脖颈上,而连接带可连接两个臂带,然后通过两个臂带可将连接带固定在手臂上,即可完成穿戴,当头部低头、歪头时,设置的拉力传感器可感受到一定的拉力,并反馈给微控制器,微控制器接收到信号后可控制微型振动电机工作,微型振动电机会产生振动,即可提醒人们需要纠正头的姿态,便于使用。
技术研发人员:高瑞军
受保护的技术使用者:广东沃莱科技有限公司
技术研发日:20220926
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!