快速释放型穿刺针夹持结构、机器人末端执行器及机器人的制作方法
本申请涉及穿刺机器人,具体而言,涉及一种快速释放型穿刺针夹持结构、机器人末端执行器及机器人。
背景技术:
1、机器人穿刺可以有效提高穿刺手术的稳定性和精准性,机器人能够稳定地夹持穿刺针,保持穿刺位置和穿刺角度。机器人通过末端执行器夹持穿刺针并进行穿刺进针操作,末端执行器需要具有夹持穿刺针和穿刺进针的功能。此外,末端执行器还要能快速释放穿刺针:患者误动时,快速释放穿刺针避免对患者造成伤害;穿刺完成后,释放穿刺针,穿刺针与患者一同进行ct扫描以验证穿刺是否到位。
2、现有方案需要手动夹持和释放穿刺针,通过旋钮、螺栓以及与其联动的夹爪等夹持穿刺针,操作复杂费时,不能快速释放。
技术实现思路
1、本申请的主要目的在于提供一种快速释放型穿刺针夹持结构,以解决相关技术中通过旋钮、螺栓以及与其联动的夹爪等夹持穿刺针,操作复杂费时,不能快速释放的问题。
2、为了实现上述目的,本申请提供一种快速释放型穿刺针夹持结构,该快速释放型穿刺针夹持结构包括:第二底座和旋转盖;其中,
3、所述第二底座上开设有用于容纳穿刺针的针体部分的导针槽,所述旋转盖铰接于所述第二底座的侧面;
4、所述旋转盖与所述第二底座通过扭簧连接,所述旋转盖上开设有与所述导针槽对应的定位槽,所述定位槽可随着旋转盖的旋转而朝向或远离所述导针槽移动。
5、进一步的,第二底座上设置有转轴,所述转轴的轴线与穿刺针的轴线平行,所述转轴的端部延伸出所述第二底座并与所述旋转盖连接。
6、进一步的,还包括限位块,所述限位块内开设有用于穿刺针穿过的第二穿针孔;
7、所述限位块卡设于所述导针槽内,所述限位块的端部延伸出所述导针槽并与所述定位槽对应。
8、进一步的,限位块包括大圆柱部和位于所述大圆柱部两端的小圆柱部,所述导针槽内开设有与所述大圆柱部对应的槽口;
9、所述大圆柱部卡设在所述槽口内,所述槽口的两侧壁与所述小圆柱部的外端面接触。
10、进一步的,限位块包括第一限位体和第二限位体,所述第一限位体和所述第二限位体可沿所述导针槽的径向对接,第一限位体和第二限位体内开设有穿针槽,在对接后形成所述第二穿针孔。
11、进一步的,旋转盖包括两个盖体和连接于两个所述盖体之间的连接体;
12、两个所述盖体沿所述导针槽的轴向分布,且两个所述盖体分别位于所述导针槽的两端,所述定位槽开设在所述盖体上,所述限位块的两端均延伸出所述导针槽并与两端的所述定位槽对应;所述盖体与所述转轴连接。
13、进一步的,定位槽设置为与所述小圆柱部对应的弧形槽,所述定位槽的深度大于等于所述导针槽的开口宽度。
14、进一步的,还包括驱动机构和与所述驱动机构连接的牵引绳,所述牵引绳远离所述驱动机构的一端与所述旋转盖连接,用于驱动所述旋转盖旋转。
15、进一步的,还包括下连杆和第二安装臂,所述第二安装臂用于与末端执行器连接;
16、所述第二安装臂上开设有第二安装槽,所述下连杆的第一端插接在所述第二安装槽内并通过螺栓锁紧,第二端与所述第二底座连接。
17、根据本申请的另一方面,提供一种机器人末端执行器,包括上述的快速释放型穿刺针夹持结构。
18、根据本申请的另一方面,提供一种手术导航定位机器人,包括上述的机器人末端执行器。
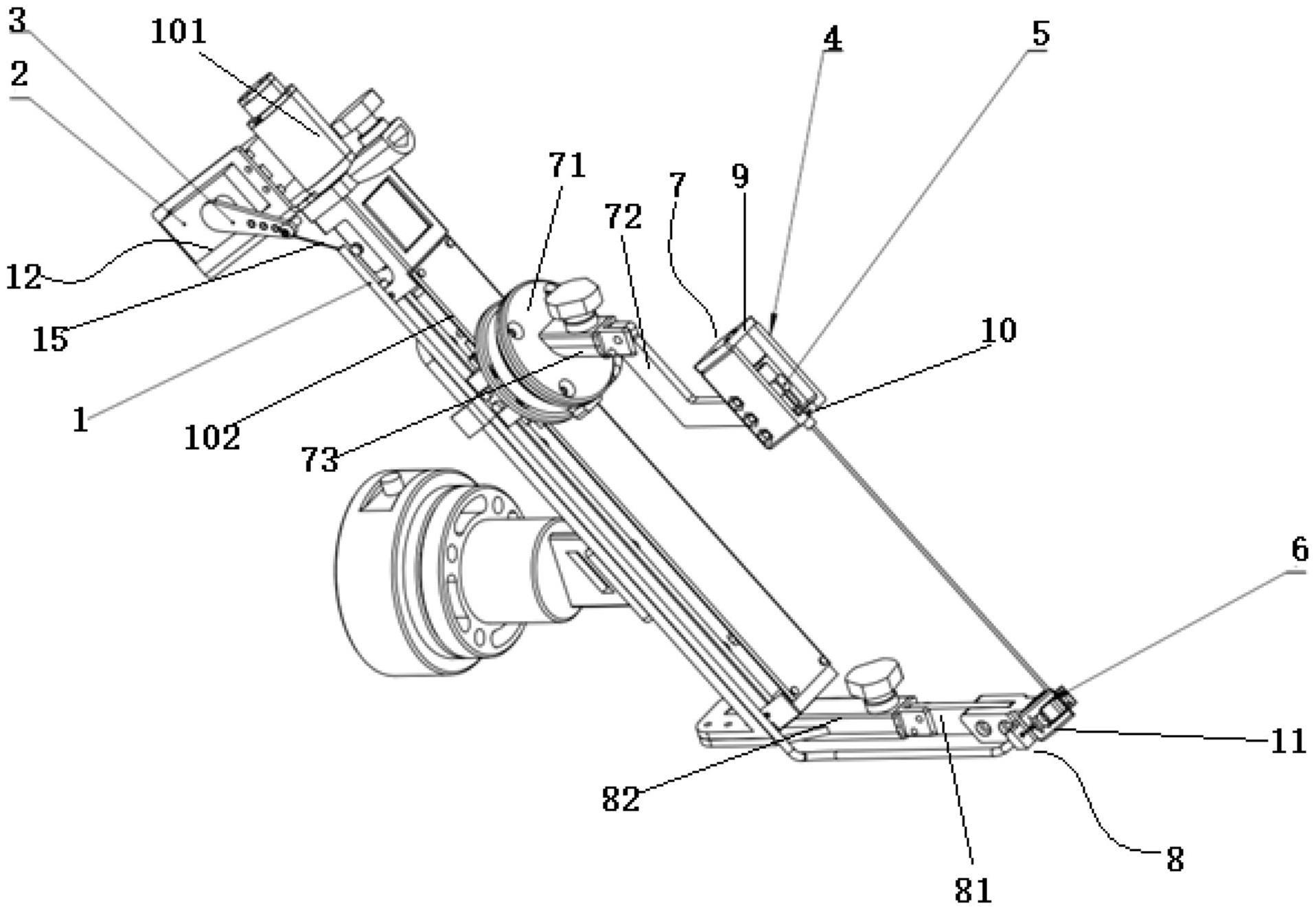
19、在本申请实施例中,通过设置第二底座和旋转盖;其中,所述第二底座上开设有用于容纳穿刺针的针体部分的导针槽,所述旋转盖铰接于所述下部连接件的侧面;所述旋转盖与所述第二底座通过扭簧连接,所述旋转盖上开设有与所述导针槽对应的定位槽,所述定位槽可随着旋转盖的旋转而朝向或远离所述导针槽移动,达到了在安装穿刺针时转动旋转盖打开导针槽,将穿刺针以水平方向卡入导针槽内,然后再释放旋转盖,在扭簧作用下旋转盖复位由定位槽和导柱槽配合夹持穿刺针,在释放穿刺针时,则再次转动旋转盖打开导针槽即可取出穿刺针的目的,从而实现了穿刺针的快速安装和释放的技术效果,进而解决了相关技术中通过旋钮、螺栓以及与其联动的夹爪等夹持穿刺针,操作复杂费时,不能快速释放的问题。
技术特征:
1.一种快速释放型穿刺针夹持结构,其特征在于,包括:第二底座和旋转盖;其中,
2.根据权利要求1所述的快速释放型穿刺针夹持结构,其特征在于,所述第二底座上设置有转轴,所述转轴的轴线与穿刺针的轴线平行,所述转轴的端部延伸出所述第二底座并与所述旋转盖连接。
3.根据权利要求2所述的快速释放型穿刺针夹持结构,其特征在于,还包括限位块,所述限位块内开设有用于穿刺针穿过的第二穿针孔;
4.根据权利要求3所述的快速释放型穿刺针夹持结构,其特征在于,所述限位块包括大圆柱部和位于所述大圆柱部两端的小圆柱部,所述导针槽内开设有与所述大圆柱部对应的槽口;
5.根据权利要求3所述的快速释放型穿刺针夹持结构,其特征在于,所述限位块包括第一限位体和第二限位体,所述第一限位体和所述第二限位体可沿所述导针槽的径向对接,第一限位体和第二限位体内开设有穿针槽,在对接后形成所述第二穿针孔。
6.根据权利要求3所述的快速释放型穿刺针夹持结构,其特征在于,所述旋转盖包括两个盖体和连接于两个所述盖体之间的连接体;
7.根据权利要求4所述的快速释放型穿刺针夹持结构,其特征在于,所述定位槽设置为与所述小圆柱部对应的弧形槽,所述定位槽的深度大于等于所述导针槽的开口宽度。
8.根据权利要求1至7任一项所述的快速释放型穿刺针夹持结构,其特征在于,还包括驱动机构和与所述驱动机构连接的牵引绳,所述牵引绳远离所述驱动机构的一端与所述旋转盖连接,用于驱动所述旋转盖旋转。
9.根据权利要求8所述的快速释放型穿刺针夹持结构,其特征在于,还包括下连杆和第二安装臂,所述第二安装臂用于与末端执行器连接;
10.一种机器人末端执行器,其特征在于,包括如权利要求1至9任一项所述的快速释放型穿刺针夹持结构。
11.一种手术导航定位机器人,其特征在于,包括如权利要求10所述的机器人末端执行器。
技术总结
本申请公开了一种快速释放型穿刺针夹持结构、机器人末端执行器及机器人,该快速释放型穿刺针夹持结构包括:第二底座和旋转盖;其中,所述第二底座上开设有用于容纳穿刺针的针体部分的导针槽,所述旋转盖铰接于所述第二底座的侧面;所述旋转盖与所述第二底座通过扭簧连接,所述旋转盖上开设有与所述导针槽对应的定位槽,所述定位槽可随着旋转盖的旋转而朝向或远离所述导针槽移动。本申请达到了控制旋转盖旋转即可进行穿刺针的安装和释放的目的,从而实现了穿刺针的快速安装和释放的技术效果,进而解决了相关技术中通过旋钮、螺栓以及与其联动的夹爪等夹持穿刺针,操作复杂费时,不能快速释放的问题。
技术研发人员:张昊任,陈向前,滕绯虎,史纪鹏
受保护的技术使用者:真健康(北京)医疗科技有限公司
技术研发日:20220927
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!