单下肢机器人步态学习检测设备的制作方法
本技术涉及康复器械学习检测,尤其是涉及一种单下肢机器人步态学习检测设备。
背景技术:
1、单下肢机器人可通过采集健侧步态信息,判断健侧的运动意图从而使其患侧能够学习健侧的步态进行康复训。具体在使用时,需要用户踩下健侧鞋,触发鞋上的传感器,再拄拐杖,触发拐杖底部传感器,当单下肢机器人识别到两传感器同时触发后会启动患侧跨步,患侧会学习健侧运动的轨迹进行运动,对用户的患侧进行康复训练,而患侧的运动轨迹能否与健侧的运动轨迹达到一致关系着康复器械的使用效果。
2、因此,如何提供一种能够复现单下肢机器人的学习运动并检测健侧运动轨迹与患侧运动轨迹一致程度的单下肢机器人步态学习检测设备是本领域技术人员需解决的技术问题之一
技术实现思路
1、本实用新型的目的在于提供一种单下肢机器人步态学习检测设备能够保存患侧学习运动装置的运动轨迹,解决了现有技术难以对单下肢机器人步态学习进行直接检测的技术问题。
2、为实现上述目的,本实用新型提供以下技术方案:
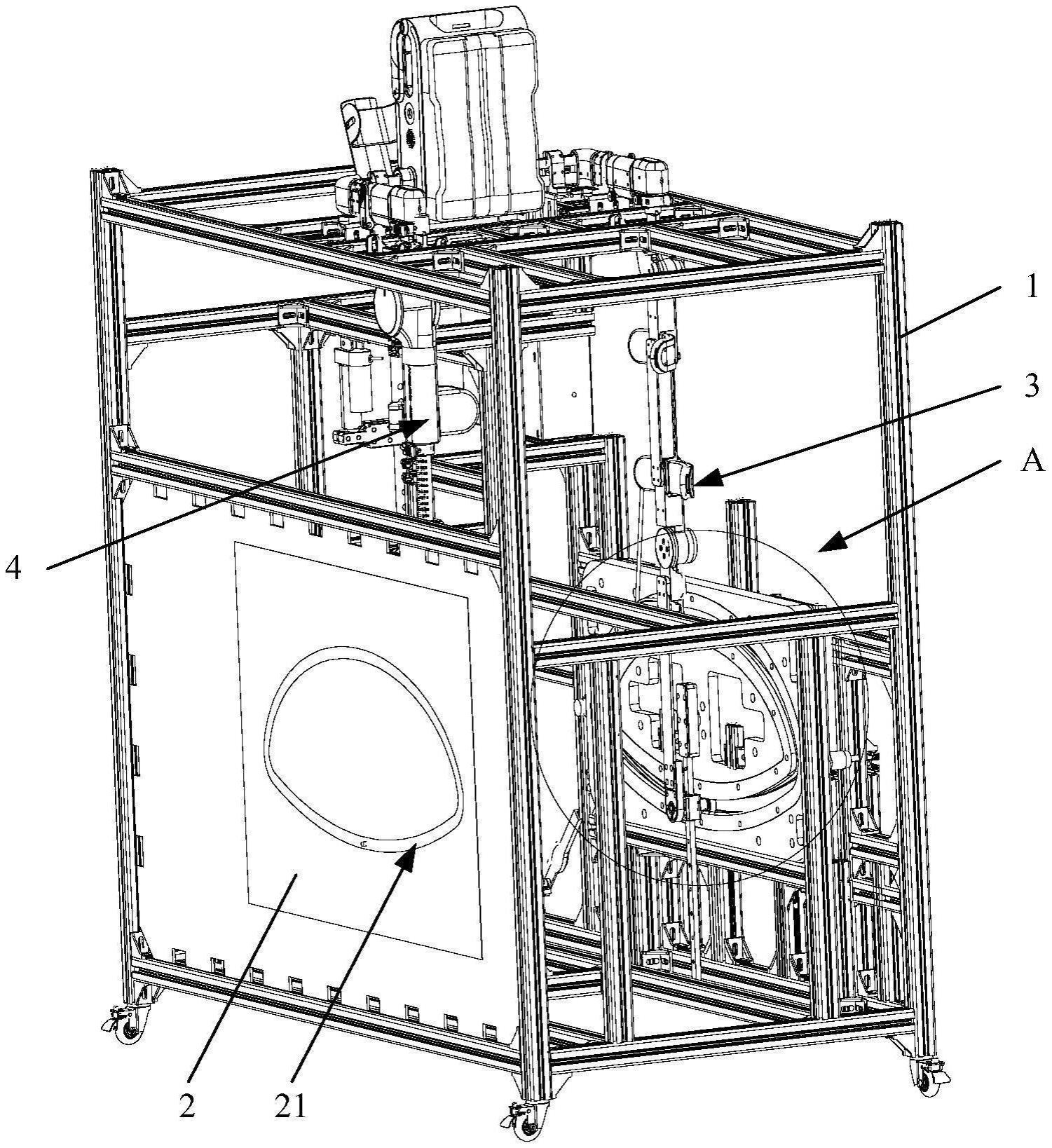
3、本实用新型提供一种单下肢机器人步态学习检测设备,包括支架、轨迹保存组件、健侧定向运动装置和患侧学习运动装置,所述轨迹保存组件、所述健侧定向运动装置和所述患侧学习运动装置均与所述支架连接,所述健侧定向运动装置用于沿预设轨迹进行动作,所述患侧学习运动装置用于以所述健侧定向运动装置的运动轨迹为标准发生动作,所述轨迹保存组件用于保存所述健侧定向运动装置的运动轨迹。
4、进一步地,所述健侧定向运动装置包括健侧机器人、轨道板组件、第一驱动机构和传动机构;
5、所述轨道板组件安装于所述支架上,所述轨道板组件上凹设有预设轨道;
6、所述第一驱动机构安装于所述支架上,所述第一驱动机构与所述传动机构连接以带动所述传动机构相对于所述轨道板组件转动;
7、所述传动机构伸入所述预设轨道内并与所述预设轨道滑动配合;
8、所述健侧机器人安装于所述支架上,且所述健侧机器人的健侧踝与所述传动机构转动连接,所述传动机构用于带动所述健侧踝沿所述预设轨道的轨迹运动。
9、进一步地,所述轨道板组件包括板体、外轨道和内轨道,所述板体凹设有凹槽,所述外轨道与所述内轨道安装于所述凹槽内并与所述凹槽之间形成所述预设轨道。
10、进一步地,所述传动机构包括固定座、滑轨和滑块组件;
11、所述滑轨通过所述固定座与所述第一驱动机构的动力输出轴连接,所述滑轨的长度方向与所述动力输出轴的轴线垂直;
12、所述滑块组件滑动连接于所述滑轨上,且所述滑块组件伸入所述预设轨道与所述预设轨道滑动配合;
13、所述健侧踝与所述滑块组件转动连接。
14、进一步地,所述健侧机器人包括大腿组件、小腿组件和第一弹性件;
15、所述大腿组件的一端与所述支架连接,所述大腿组件的另一端与所述小腿组件转动连接,所述小腿组件背离所述大腿组件的一端具有所述健侧踝;
16、所述第一弹性件的两端分别与所述大腿组件和所述小腿组件连接,且所述第一弹性件位于所述大腿组件和所述小腿组件的同侧,以使所述小腿组件与所述大腿组件之间的夹角由180°减小时,所述小腿组件具有朝向正确侧转动的趋势。
17、进一步地,所述健侧定向运动装置还包括健侧鞋、拐杖和第二驱动机构;
18、所述健侧鞋安装于所述支架上且所述健侧鞋的底部具有第一传感器;
19、所述拐杖位于所述健侧鞋的上方并与所述支架沿竖直方向滑动配合,所述拐杖的底部具有第二传感器;
20、所述第二驱动机构安装于所述支架上并与所述拐杖连接,所述第二驱动机构用于带动所述拐杖相对于所述支架滑动,以触发或取消触发第一传感器和第二传感器。
21、进一步地,所述轨道板组件的两侧安装有第一接近开关和第二接近开关,所述健侧踝位于所述预设轨道的起始点时触发所述第一接近开关,所述健侧踝位于所述预设轨道的终止点时触发所述第二接近开关,所述第一接近开关和所述第二接近开关与所述第二驱动机构电连接。
22、进一步地,所述患侧学习运动装置包括患侧机器人和记录组件,所述患侧机器人安装于所述支架上,所述记录组件安装于所述患侧机器人上且端部具有记录点,所述患侧机器人上患侧踝的轴线经过所述记录点。
23、进一步地,所述记录组件包括支撑板组、调整座和绘制笔,所述支撑板组安装于所述患侧机器人上,所述调整座沿靠近或远离所述轨迹保存组件的方向位置可调节地安装于所述支撑板组上,所述绘制笔安装于所述调整座上,所述绘制笔的端部具有所述记录点。
24、进一步地,所述记录组件还包括第二弹性件,所述绘制笔沿着靠近或远离所述轨迹保存组件的方向与所述调整座滑动配合,所述第二弹性件安装于所述绘制笔与所述调整座之间,以使得所述绘制笔压紧于所述轨迹保存组件上。
25、本实用新型提供的单下肢机器人步态学习检测设备能产生如下
26、有益效果:
27、在上述单下肢机器人步态学习检测设备工作时,首先健侧定向运动装置沿预设的轨迹进行动作,一次动作完成后,患侧学习运动装置以健侧定向运动装置的运动轨迹为标准进行动作学习,在动作的过程中,轨迹保存组件保存健侧定向运动装置的运动轨迹,判断患侧学习运动装置学习的是否合格。
28、相对于现有技术来说,本实用新型提供的单下肢机器人步态学习检测设备能够令健侧定向运动装置按照标准轨迹进行运动,并且能够保存患侧学习运动装置的运动轨迹,通过观察运动轨迹是否满足标准来判断患侧学习运动装置学习的是否合格,解决了现有技术难以对单下肢机器人步态学习进行直接检测的技术问题。
技术特征:
1.一种单下肢机器人步态学习检测设备,其特征在于,包括支架(1)、轨迹保存组件(2)、健侧定向运动装置(3)和患侧学习运动装置(4),所述轨迹保存组件(2)、所述健侧定向运动装置(3)和所述患侧学习运动装置(4)均与所述支架(1)连接,所述健侧定向运动装置(3)用于沿预设轨迹进行动作,所述患侧学习运动装置(4)用于以所述健侧定向运动装置(3)的运动轨迹为标准发生动作,所述轨迹保存组件(2)用于保存所述健侧定向运动装置(3)的运动轨迹。
2.根据权利要求1所述的单下肢机器人步态学习检测设备,其特征在于,所述健侧定向运动装置(3)包括健侧机器人(31)、轨道板组件(32)、第一驱动机构(33)和传动机构(34);
3.根据权利要求2所述的单下肢机器人步态学习检测设备,其特征在于,所述轨道板组件(32)包括板体(322)、外轨道(323)和内轨道(324),所述板体(322)凹设有凹槽,所述外轨道(323)与所述内轨道(324)安装于所述凹槽内并与所述凹槽之间形成所述预设轨道(321)。
4.根据权利要求2所述的单下肢机器人步态学习检测设备,其特征在于,所述传动机构(34)包括固定座(341)、滑轨(342)和滑块组件(343);
5.根据权利要求2所述的单下肢机器人步态学习检测设备,其特征在于,所述健侧机器人(31)包括大腿组件(311)、小腿组件(312)和第一弹性件(313);
6.根据权利要求2所述的单下肢机器人步态学习检测设备,其特征在于,所述健侧定向运动装置(3)还包括健侧鞋(35)、拐杖(36)和第二驱动机构(37);
7.根据权利要求6所述的单下肢机器人步态学习检测设备,其特征在于,所述轨道板组件(32)的两侧安装有第一接近开关(5)和第二接近开关(6),所述健侧踝(3121)位于所述预设轨道(321)的起始点时触发所述第一接近开关(5),所述健侧踝(3121)位于所述预设轨道(321)的终止点时触发所述第二接近开关(6),所述第一接近开关(5)和所述第二接近开关(6)与所述第二驱动机构(37)电连接。
8.根据权利要求1所述的单下肢机器人步态学习检测设备,其特征在于,所述患侧学习运动装置(4)包括患侧机器人(41)和记录组件(42),所述患侧机器人(41)安装于所述支架(1)上,所述记录组件(42)安装于所述患侧机器人(41)上且端部具有记录点(4231),所述患侧机器人(41)上患侧踝(411)的轴线经过所述记录点(4231)。
9.根据权利要求8所述的单下肢机器人步态学习检测设备,其特征在于,所述记录组件(42)包括支撑板组(421)、调整座(422)和绘制笔(423),所述支撑板组(421)安装于所述患侧机器人(41)上,所述调整座(422)沿靠近或远离所述轨迹保存组件(2)的方向位置可调节地安装于所述支撑板组(421)上,所述绘制笔(423)安装于所述调整座(422)上,所述绘制笔(423)的端部具有所述记录点(4231)。
10.根据权利要求9所述的单下肢机器人步态学习检测设备,其特征在于,所述记录组件(42)还包括第二弹性件(424),所述绘制笔(423)沿着靠近或远离所述轨迹保存组件(2)的方向与所述调整座(422)滑动配合,所述第二弹性件(424)安装于所述绘制笔(423)与所述调整座(422)之间,以使得所述绘制笔(423)压紧于所述轨迹保存组件(2)上。
技术总结
本技术提供了一种单下肢机器人步态学习检测设备,涉及康复器械学习检测技术领域,本技术提供的单下肢机器人步态学习检测设备包括支架、轨迹保存组件、健侧定向运动装置和患侧学习运动装置,轨迹保存组件、健侧定向运动装置和患侧学习运动装置均与支架连接,健侧定向运动装置用于沿预设轨迹进行动作,患侧学习运动装置用于以健侧定向运动装置的运动轨迹为标准发生动作,轨迹保存组件用于保存健侧定向运动装置的运动轨迹。上述检测设备能够令健侧定向运动装置按照标准轨迹进行运动,并且能够保存患侧学习运动装置的运动轨迹,解决了现有技术难以对单下肢机器人步态学习进行直接检测的技术问题。
技术研发人员:徐军峰,张娇娇,刘海燕,胡帆,王彬彬,刘畅,李晔,张芙,董小茜,李若瑄,俞凌刚,樊炎军,李鲁亚
受保护的技术使用者:河南省医疗器械检验所
技术研发日:20221111
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!