一种血管介入手术机器人阻力反馈结构
本专利涉及手术机器人领域,具体而言,涉及一种血管介入手术机器人阻力反馈结构。
背景技术:
1、目前,血管内介入手术大多由医生人为操刀,对医生的力感把握能力要求极高,主刀医生需要长期的培养与锻炼才能进行手术。同时手术需要进行dsa显影,医生与患者需要长期处于x射线环境下,即便医生身着防护服,但是身体仍难以抵抗射线的损伤。多功能集成的介入手术机器人应运而生,现有的手术机器人对于力反馈方法是在导丝的末端装上力传感装置,能够第一时间检测到递送阻力的信息,然而要实现在导丝末端装载力传感装置具有相对较高的技术难度,实现结构较为复杂,成本较高。
技术实现思路
1、为了克服现有技术的不足,本实用新型提供一种血管介入手术机器人阻力反馈结构,能解决导丝末端装载力传感装置具有相对较高的技术难度,实现结构较为复杂等技术问题。
2、为解决上述技术问题,本实用新型提供如下技术方案:
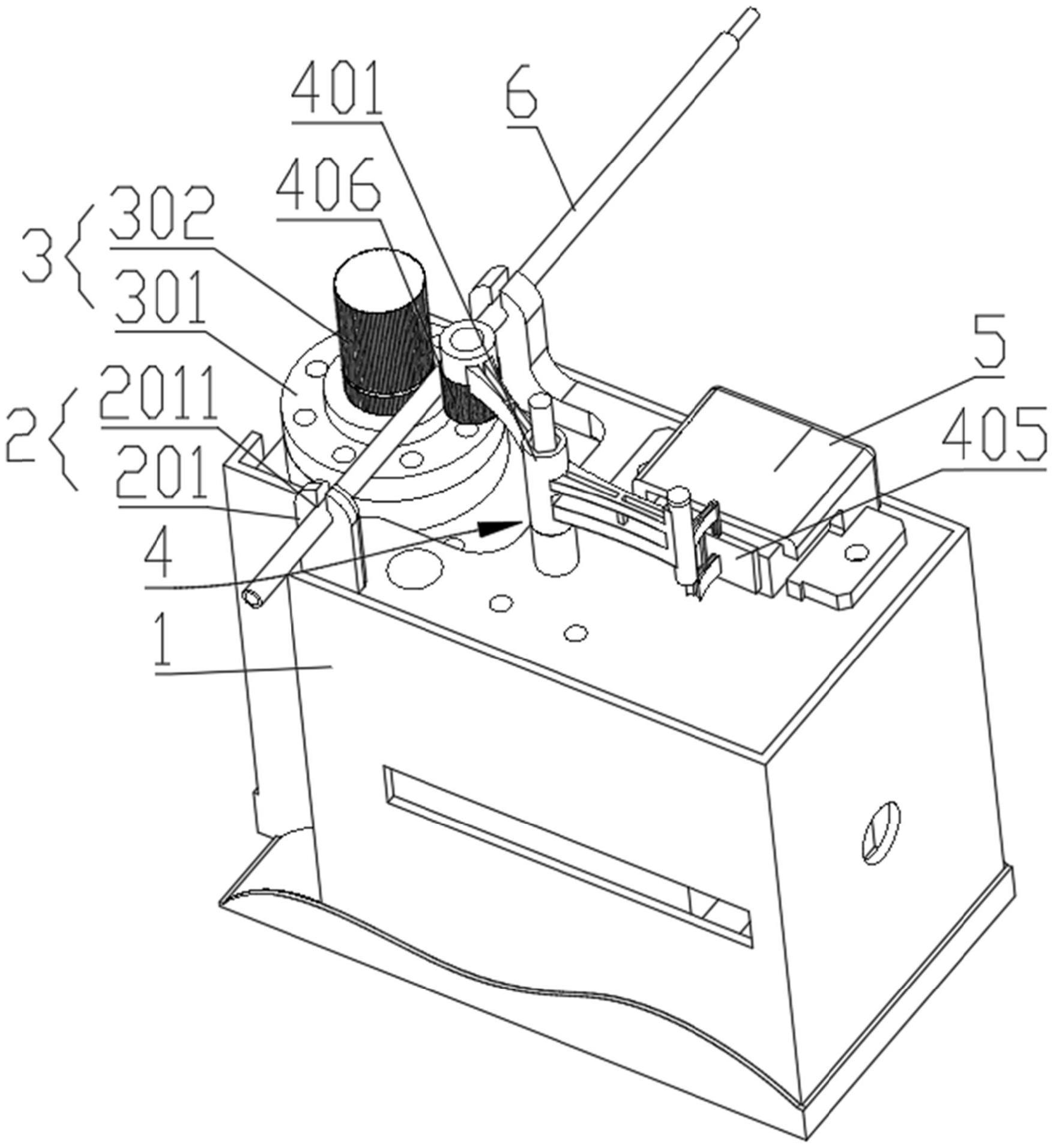
3、一种血管介入手术机器人阻力反馈结构,其特征在于,包括底座,所述底座上固定有导向支撑模块,导丝穿过导向支撑模块,所述底座位于导向支撑模块一侧固定有驱动模块,所述驱动模块的驱动端固定有主动摩擦轮,所述主动摩擦轮与导丝顶抵接触,所述底座位于导向支撑模块的另一侧设有阻力传导模块,所述阻力传导模块中部可转动的连接在底座上,所述阻力传导模块包括位于中部两侧的传导端和测试端,所述传导端上可转动的固定有从动摩擦轮,所述从动摩擦轮与导丝顶抵接触,所述底座位于测试端一侧固定有压力检测模块,所述测试端贴合在压力检测模块上。
4、进一步的,所述阻力传导模块包括中轴和固定在中轴两侧的传动臂和测试臂,所述从动摩擦轮固定在传动臂的端部,所述测试臂的端部固定有测试板,所述测试板与压力检测模块相互贴合。
5、进一步的,所述测试板竖直设置,所述测试板的延伸平面与导丝的延伸方向相互垂直。
6、进一步的,所述传动臂和测试臂之间具有夹角,所述夹角为钝角。
7、进一步的,所述测试臂的端部固定有连接臂,所述连接臂的端部与测试板的中部固定连接,所述连接臂与测试板之间相互垂直。
8、进一步的,所述连接臂的延伸方向与测试臂的连接方向相互垂直。
9、进一步的,所述导向支撑模块包括至少两个导向板,所述导向板分别位于底座的两端,所述导向板上均开设有导向孔,所述导丝依次穿过导向孔。
10、进一步的,所述驱动模块包括驱动电机,所述主动摩擦轮与驱动电机驱动连接,所述驱动电机驱动主动摩擦轮转动。
11、进一步的,所述中轴内固定有弹性片。
12、本实用新型的有益效果是:
13、本方案中,主动摩擦轮和从动摩擦轮相互配合驱动导丝进给,阻力传导模块可转动的固定在底座上,在导丝受到递送阻力时,阻力传导模块沿导丝进给方向的相反方向转动,同时测试端对压力检测模块施加突变压力,压力检测模块从而对递送阻力进行检测传输,实现对递送阻力的实时精准检测,实现结构简单,成本较低。
技术特征:
1.一种血管介入手术机器人阻力反馈结构,其特征在于,包括底座,所述底座上固定有导向支撑模块,导丝穿过导向支撑模块,所述底座位于导向支撑模块一侧固定有驱动模块,所述驱动模块的驱动端固定有主动摩擦轮,所述主动摩擦轮与导丝顶抵接触,所述底座位于导向支撑模块的另一侧设有阻力传导模块,所述阻力传导模块中部可转动的连接在底座上,所述阻力传导模块包括位于中部两侧的传导端和测试端,所述传导端上可转动的固定有从动摩擦轮,所述从动摩擦轮与导丝顶抵接触,所述底座位于测试端一侧固定有压力检测模块,所述测试端贴合在压力检测模块上。
2.根据权利要求1所述的血管介入手术机器人阻力反馈结构,其特征在于:所述阻力传导模块包括中轴和固定在中轴两侧的传动臂和测试臂,所述从动摩擦轮固定在传动臂的端部,所述测试臂的端部固定有测试板,所述测试板与压力检测模块相互贴合。
3.根据权利要求2所述的血管介入手术机器人阻力反馈结构,其特征在于:所述测试板竖直设置,所述测试板的延伸平面与导丝的延伸方向相互垂直。
4.根据权利要求2所述的血管介入手术机器人阻力反馈结构,其特征在于:所述传动臂和测试臂之间具有夹角,所述夹角为钝角。
5.根据权利要求2所述的血管介入手术机器人阻力反馈结构,其特征在于:所述测试臂的端部固定有连接臂,所述连接臂的端部与测试板的中部固定连接,所述连接臂与测试板之间相互垂直。
6.根据权利要求5所述的血管介入手术机器人阻力反馈结构,其特征在于:所述连接臂的延伸方向与测试臂的连接方向相互垂直。
7.根据权利要求1所述的血管介入手术机器人阻力反馈结构,其特征在于:所述导向支撑模块包括至少两个导向板,所述导向板分别位于底座的两端,所述导向板上均开设有导向孔,所述导丝依次穿过导向孔。
8.根据权利要求1所述的血管介入手术机器人阻力反馈结构,其特征在于:所述驱动模块包括驱动电机,所述主动摩擦轮与驱动电机驱动连接,所述驱动电机驱动主动摩擦轮转动。
9.根据权利要求2所述的血管介入手术机器人阻力反馈结构,其特征在于:所述中轴内固定有弹性片。
技术总结
本专利涉及手术机器人领域,具体而言,涉及一种血管介入手术机器人阻力反馈结构,包括底座,底座上固定有导向支撑模块,导丝穿过导向支撑模块,底座位于导向支撑模块一侧固定有驱动模块,驱动模块的驱动端固定有主动摩擦轮,主动摩擦轮与导丝顶抵接触,底座位于导向支撑模块的另一侧设有阻力传导模块,阻力传导模块中部可转动的连接在底座上,阻力传导模块包括位于中部两侧的传导端和测试端,传导端上可转动的固定有从动摩擦轮,从动摩擦轮与导丝顶抵接触,底座位于测试端一侧固定有压力检测模块,测试端贴合在压力检测模块上,测试端对压力检测模块施加突变压力,实现对递送阻力的实时精准检测,成本较低。
技术研发人员:潘思,张儒生,石凯冬,宋舒心,胡雅琦,梅子阳,胡锦浩,赵扬
受保护的技术使用者:厦门大学
技术研发日:20221128
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!