执行器及手术系统的制作方法
本申请属于医疗设备,具体涉及一种执行器及使用该执行器的手术系统。
背景技术:
1、椎弓根钉内固定技术是脊柱侧凸矫正手术、椎体骨折治疗手术、脊柱融合手术等脊柱手术中的常用手段。椎弓根钉内固定需要在脊柱椎弓根处钻孔,之后将骨螺钉植入。
2、在进行脊柱手术操作时,脊柱机器人相较于传统人工脊柱手术提供了一些优势,包括减少外科医生的疲劳和颤抖,同时通过固定的工作角度为器械提供稳定性,从而提高准确性和精确度。并且可以有效减少术中医生透视次数和时间,减少医生和患者的辐射剂量。具体的,在脊柱机器人辅助手术系统,通常包括执行器、搭载执行器的机器人臂、定位系统(也可以称之为导航系统)以及控制器。其中,执行器上设置有手术工具,用于作用于患处。机器人臂相当于医生的手臂,协助医生将执行器或手术工具移动至目标位置。定位系统相当于医生的眼睛,用于定位执行器或手术工具。控制器相当于医生的大脑,用于控制机器人臂按照手术计划运动。通过脊柱机器人辅助手术系统的设置,能够更准确地在椎弓根处钻孔、置钉。
3、目前常用的脊柱机器人通常设置一导向套筒,导向套筒由机器人臂把持。进行手术时,医生需要手持钻孔工具在导向套筒的导向和定位下进行手动钻孔,操作不便。
技术实现思路
1、本申请旨在至少解决现有技术中存在的技术问题之一,提供一种执行器及使用该执行器的手术系统。
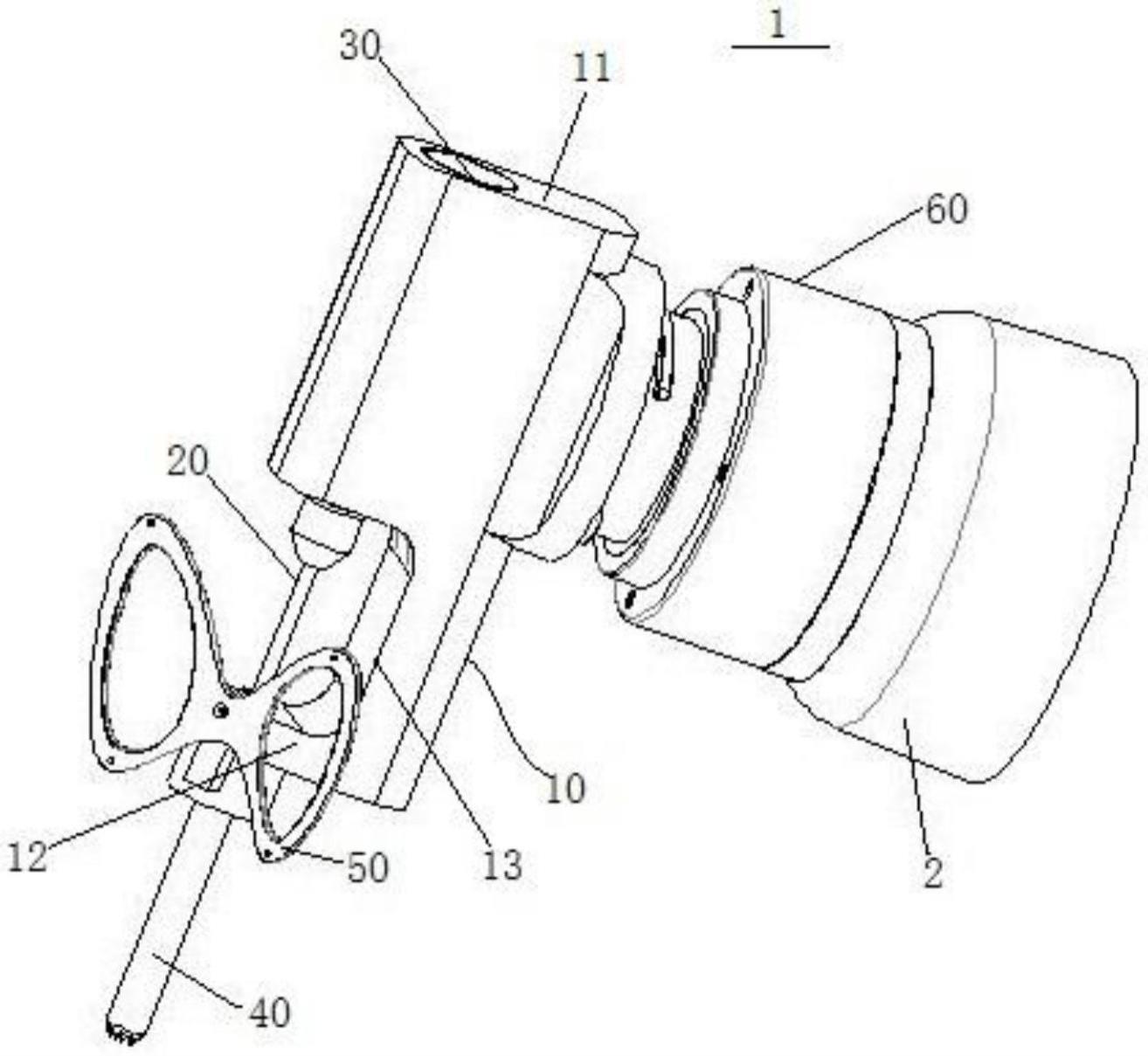
2、第一方面,提供一种执行器,用于在机器人臂的把持下执行预定动作,包括:
3、执行器本体;
4、钻头,从所述执行器本体向远侧延伸,用于周向旋转以进行钻孔;
5、动力机构,连接所述钻头的近侧端并设于所述执行器本体,用于驱动所述钻头周向旋转;
6、滑动套筒,套设在所述钻头的远侧端外并与所述执行器本体滑动配合,用于在钻孔过程中对所述钻头进行导向并能随钻孔深度增加向所述钻头近侧端滑动。
7、在第一种可能的实现方式中,所述钻头延伸的方向与所述机器人臂的末端臂的轴线具有预定夹角。
8、结合上述可能的实现方式,在第二种可能的实现方式中,所述预定夹角为90度。
9、结合上述可能的实现方式,在第三种可能的实现方式中,所述执行器本体包括第一装配结构和第二装配结构,所述第一装配结构用于装配所述动力机构,所述第二装配结构用于装配所述套筒。
10、结合上述可能的实现方式,在第四种可能的实现方式中,所述第一装配结构和所述第二装配结构分别位于所述执行器本体的第一方向上的相对两端。
11、结合上述可能的实现方式,在第五种可能的实现方式中,所述第二装配结构设有导向孔,所述导向孔沿所述钻头的轴向设置,所述导向孔与所述滑动套筒滑动配合。
12、结合上述可能的实现方式,在第六种可能的实现方式中,所述动力机构与所述执行器本体可拆卸连接。
13、结合上述可能的实现方式,在第七种可能的实现方式中,所述执行器还包括示踪器,所述示踪器设于所述执行器本体上,用于定位所述钻头的位置。
14、结合上述可能的实现方式,在第八种可能的实现方式中,所述执行器还包括六维力传感器,所述六维力传感器设置于所述执行器本体上与所述机器人臂连接的位置处,用于检测所述执行器本体的受力情况。
15、第二方面,提供一种手术系统,包括前文所述的执行器;以及
16、机器人臂,用于搭载所述执行器;
17、定位系统,用于定位所述执行器或所述动力机构的位置;
18、控制器,用于控制所述机器人臂和/或所述执行器按照预定手术计划执行手术。
19、本申请的上述技术方案具有如下有益的技术效果:
20、本申请实施例的执行器,其动力机构能够驱动钻头周向旋转以实现钻孔,无需单独手动把持。在钻孔过程中,滑动套筒能够对钻头进行导向,从而避免钻头在钻孔过程中发生弯曲。并且,由于滑动套筒与执行器本体滑动配合,其还能随钻孔深度增加向钻头近侧端滑动,从而不会影响钻头进给。
技术特征:
1.一种执行器,用于在机器人臂的把持下执行预定动作,其特征在于,包括:
2.根据权利要求1所述的执行器,其特征在于,所述钻头延伸的方向与所述机器人臂的末端臂的轴线具有预定夹角。
3.根据权利要求2所述的执行器,其特征在于,所述预定夹角为90度。
4.根据权利要求1所述的执行器,其特征在于,所述执行器本体包括第一装配结构和第二装配结构,所述第一装配结构用于装配所述动力机构,所述第二装配结构用于装配所述套筒。
5.根据权利要求4所述的执行器,其特征在于,所述第一装配结构和所述第二装配结构分别位于所述执行器本体的第一方向上的相对两端。
6.根据权利要求4所述的执行器,其特征在于,所述第二装配结构设有导向孔,所述导向孔沿所述钻头的轴向设置,所述导向孔与所述滑动套筒滑动配合。
7.根据权利要求1所述的执行器,其特征在于,所述动力机构与所述执行器本体可拆卸连接。
8.根据权利要求1所述的执行器,其特征在于,所述执行器还包括示踪器,所述示踪器设于所述执行器本体上,用于定位所述钻头的位置。
9.根据权利要求1所述的执行器,其特征在于,所述执行器还包括六维力传感器,所述六维力传感器设置于所述执行器本体上与所述机器人臂连接的位置处,用于检测所述执行器本体的受力情况。
10.一种手术系统,其特征在于,包括如权利要求1-9任一项所述的执行器;以及
技术总结
本申请公开了一种执行器及手术系统,所述执行器包括:执行器本体;钻头,从所述执行器本体向远侧延伸,用于周向旋转以进行钻孔;动力机构,连接所述钻头的近侧端并设于所述执行器本体,用于驱动所述钻头周向旋转;滑动套筒,套设在所述钻头的远侧端外并与所述执行器本体滑动配合,用于在钻孔过程中对所述钻头进行导向并能随钻孔深度增加向所述钻头近侧端滑动。本申请的执行器在进行钻孔时,无需单独手动把持,并且,在钻孔过程中,其滑动套筒除了能够对钻头进行导向,还能随钻孔深度增加向钻头近侧端滑动,以避免影响钻头进给。
技术研发人员:闫钧,张大海,马舜尧
受保护的技术使用者:北京和华瑞博医疗科技有限公司
技术研发日:20221202
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!