一种人体移位护理机器人的制作方法
本技术涉及医疗护理,特别是涉及一种人体移位护理机器人。
背景技术:
1、随着社会的发展和进步、人民生活水平的提高,对护工的需求越来越大,要求也越来越高。越来越多的打工者走进了护工这个行业,在医院、社区或家庭,很多病人接受了护工提供的服务。目前的医疗护理行业服务模式与投资服务的内容主要是照料病人的起居生活。
2、人体移位护理机器人是一种在辅助病床上患者进行位移的设备,在现有的医疗护理过程中,对于长期卧床难以行动的患者来说,其位移是一大难题,因此患者长期使用的物件(如床单、床垫)难以进行更换,长期使用卫生难以保障,因此难以满足人们的需求。
技术实现思路
1、本实用新型的一目的是,提供一种人体移位护理机器人,所述人体移位机器人能够直接将患者托起,使垫在患者下方的物件能够进行更换,从而保证了患者床体的干净整洁。
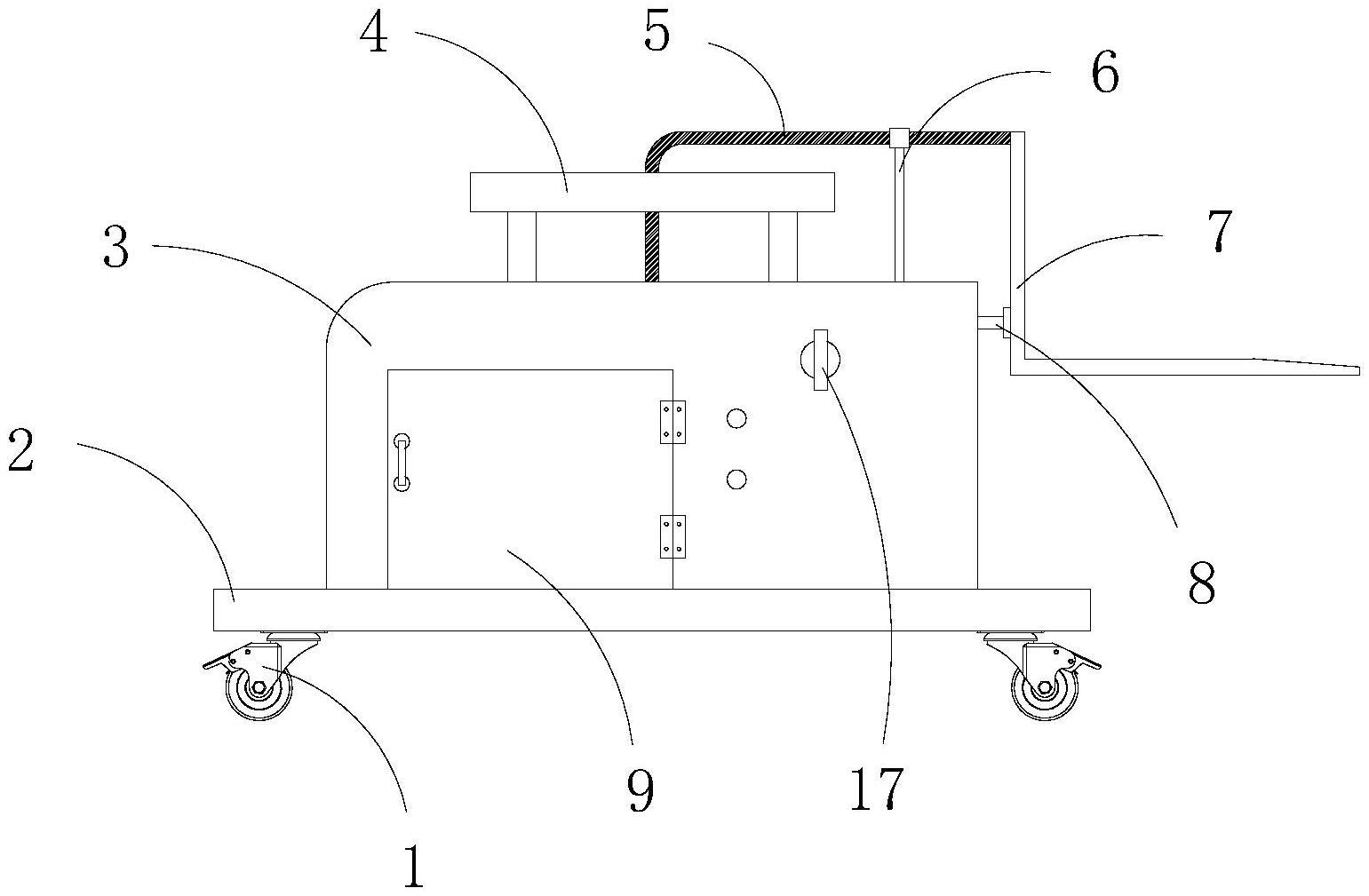
2、本实用新型在一方面提供了一种人体移位护理机器人,包括移位机器人主体、设置于所述移位机器人主体的一侧的移位板以及设置于所述移位机器人主体内部的升降机构,其中所述移位板用于将患者托起;所述升降机构包括顶升气缸、设置在所述顶升气缸上的连架、连接于所述连架和所述移位板的吊架,所述升降机构通过控制所述顶升气缸的上升和下降来实现对所述连架、所述吊架以及所述移位板的高度调整,从而经由所述移位板将患者托起,便于更换患者下方物件。
3、在本实用新型的一实施例中,所述升降机构还包括设置于所述移位机器人主体内部的稳定组件,所述稳定组件包括多个穿插在所述移位机器人主体内部的立柱、连接于多个所述立柱的辅助架以及滑动套接在所述立柱上的滑套,所述连架的端部固定在对应的滑套上,以此在所述连架在竖直方向上移动时,所述滑套在所述立柱上进行升降移动,通过所述滑套和所述立柱的作用能够承担所述连架的侧向压力,从而使得所述升降机构带动所述移位板平衡移动。
4、在本实用新型的一实施例中,所述吊架具有连接于所述连架的竖直段和两端分别连接于所述竖直段与所述移位板的水平段,所述稳定组件还包括用于支撑所述水平段的辅助支撑杆,所述辅助支撑杆为l形支撑杆,所述l形支撑杆的水平段连接于任一个所述滑套,所述l形支撑杆的竖直段支撑所述吊架的水平段。
5、在本实用新型的一实施例中,所述移位板具有竖直端和延伸自所述竖直端的水平端,即所述移位板为l型移位板,所述移位板的所述竖直端通过滑动组件可滑动地安装在所述移位机器人主体的侧面。
6、在本实用新型的一实施例中,所述滑动组件包括沿竖直方向开设在所述移位机器人主体的侧面的滑槽、滑动安装于所述滑槽内的滑块以及两端分别连接于所述滑块和所述移位板的限位杆。
7、在本实用新型的一实施例中,所述滑块具有滑动部和凸出延伸自所述滑动部中部的连接部,所述滑动部两侧设置有稳定球珠,所述滑块通过所述稳定球珠与所述滑槽的内壁滚动连接,所述连接部用于连接所述限位杆。
8、在本实用新型的一实施例中,所述滑动组件为两组,两组所述滑动组件分别设置在所述移位板的两侧。
9、在本实用新型的一实施例中,所述移位机器人主体的下方安装有底板,所述底板的下方四个拐角处均安装有万向轮。
10、在本实用新型的一实施例中,所述移位机器人主体的前表面安装有前门,用于打开所述移位机器人主体进行内部结构的维修,所述移位机器人主体上还设置有控制按钮,用于控制顶升气缸的运行。
11、本实用新型在另一方面还提供了所述人体移位护理机器人的使用方法,包括步骤:
12、驱动顶升气缸下降,使得连架和吊架带动移位板向下移动,直至移位板的高度与患者下身水平;
13、推动移位机器人主体,使移位板插入患者身体下方,
14、驱动顶升气缸上升,使得连架和吊架带动移位板向上移动,使得移位板将患者托起,此时对患者身下物件进行更换,完成后再驱动顶升气缸将患者放回原位。
15、本实用新型的所述人体移位机器人能够直接将患者托起,使垫在患者下方的物件能够进行更换,从而保证了患者床体的干净整洁。
16、本实用新型的所述人体移位机器人还包括稳定组件,稳定组件设置于移位机器人主体的内部,稳定组件包括多个穿插安装在移位机器人主体内部的立柱,立柱上滑动套接有滑套,连架的端部固定在各个滑套上,使得当连架在竖直方向上进行移动时,滑套在立柱上进行升降移动,通过滑套和立柱的作用能够承担连架的侧向压力,从而达到了平衡升降的效果,提升了该装置的运行稳定性。
17、本实用新型的所述人体移位机器人的移位板的竖直端内侧安装有限位杆,移位机器人主体的侧面沿竖直方向开设有滑槽,滑槽内滑动安装有滑块,限位杆的一端固定安装在滑块上,因此当移位板在竖直方向上进行移动时,滑块在滑槽内进行滑动,从而保证移位板移动稳定。
18、通过对随后的描述和附图的理解,本实用新型进一步的目的和优势将得以充分体现。
技术特征:
1.一种人体移位护理机器人,其特征在于,包括移位机器人主体、设置于所述移位机器人主体的一侧的移位板以及设置于所述移位机器人主体内部的升降机构,其中所述移位板用于将患者托起;所述升降机构包括顶升气缸、设置在所述顶升气缸上的连架、连接于所述连架和所述移位板的吊架,所述升降机构通过控制所述顶升气缸的上升和下降来实现对所述连架、所述吊架以及所述移位板的高度调整,从而经由所述移位板将患者托起,便于更换患者下方物件。
2.根据权利要求1所述的人体移位护理机器人,其特征在于,所述升降机构还包括设置于所述移位机器人主体内部的稳定组件,所述稳定组件包括多个穿插在所述移位机器人主体内部的立柱、连接于多个所述立柱的辅助架以及滑动套接在所述立柱上的滑套,所述连架的端部固定在对应的滑套上,以此在所述连架在竖直方向上移动时,所述滑套在所述立柱上进行升降移动,通过所述滑套和所述立柱的作用能够承担所述连架的侧向压力,从而使得所述升降机构带动所述移位板平衡移动。
3.根据权利要求2所述的人体移位护理机器人,其特征在于,所述吊架具有连接于所述连架的竖直段和两端分别连接于所述竖直段与所述移位板的水平段,所述稳定组件还包括用于支撑所述水平段的辅助支撑杆,所述辅助支撑杆为l形支撑杆,所述l形支撑杆的水平段连接于任一个所述滑套,所述l形支撑杆的竖直段支撑所述吊架的水平段。
4.根据权利要求2所述的人体移位护理机器人,其特征在于,所述移位板具有竖直端和延伸自所述竖直端的水平端,即所述移位板为l型移位板,所述移位板的所述竖直端通过滑动组件可滑动地安装在所述移位机器人主体的侧面。
5.根据权利要求4所述的人体移位护理机器人,其特征在于,所述滑动组件包括沿竖直方向开设在所述移位机器人主体的侧面的滑槽、滑动安装于所述滑槽内的滑块以及两端分别连接于所述滑块和所述移位板的限位杆。
6.根据权利要求5所述的人体移位护理机器人,其特征在于,所述滑块具有滑动部和凸出延伸自所述滑动部中部的连接部,所述滑动部两侧设置有稳定球珠,所述滑块通过所述稳定球珠与所述滑槽的内壁滚动连接,所述连接部用于连接所述限位杆。
7.根据权利要求6所述的人体移位护理机器人,其特征在于,所述滑动组件为两组,两组所述滑动组件分别设置在所述移位板的两侧。
8.根据权利要求1至7中任一项所述的人体移位护理机器人,其特征在于,所述移位机器人主体的下方安装有底板,所述底板的下方四个拐角处均安装有万向轮。
9.根据权利要求1至7中任一项所述的人体移位护理机器人,其特征在于,所述移位机器人主体的前表面安装有前门,用于打开所述移位机器人主体进行内部结构的维修。
10.根据权利要求1至7中任一项所述的人体移位护理机器人,其特征在于,所述移位机器人主体上还设置有控制按钮,用于控制顶升气缸的运行。
技术总结
本技术涉及一种人体移位护理机器人,该人体移位护理机器人包括移位机器人主体、设置于移位机器人主体的一侧的移位板以及设置于移位机器人主体内部的升降机构,其中移位板用于将患者托起;升降机构包括顶升气缸、设置在顶升气缸上的连架、连接于连架和移位板的吊架,该人体移位护理机器人能够通过控制顶升气缸的上升和下降来实现对连架、吊架以及移位板的高度调整,从而经由移位板将患者托起,使垫在患者下方的物件能够进行更换,从而保证了患者床体的干净整洁。
技术研发人员:李文超,李凌,辜嘉
受保护的技术使用者:苏州中科先进技术研究院有限公司
技术研发日:20221208
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!