手术机器人的线缆固定装置及手术机器人的制作方法
本技术涉及医疗设备,特别是涉及一种手术机器人的线缆固定装置及手术机器人。
背景技术:
1、一般地,立体定向类手术机器人的主体部分为推车,推车上设有机器人,该机器人的作用是将手术器械运输到医生指定的位置。由于机器人的末端通常会安装一些部件,例如:力传感器,相机,控制板卡等等,这些部件需要被供电和通讯,因此需要与推车内部的其他部件连接,所以需要走线。
2、目前,机器人内部都会预留一些线缆,如图5所示,从末端121到基座122,供末端部件走线使用,因此机器人的这根内部线缆有两个出线点,一个在基座,一个在末端。其中,基座的空间较大,出线比较容易;理论上末端最优的出线点在六轴处,这样与末端部件连接时,外面就完全看不见线缆,更加美观,而且线缆不会由于机器人的运动而缠绕,拉扯,可靠性更高。
3、但是由于六轴处的空间很小,如图6所示,很多机器人会选择在四轴123处出线,这样线缆就会有一部分裸露在外面。在机器人运动的时候,外部线缆容易缠绕,拉扯。而且,在真实的手术场景中,由于情况更加复杂,机器人外面通常会套一层无菌罩,此时,线缆很容易与无菌罩缠绕拉扯,对手术环境造成不利影响。
技术实现思路
1、基于此,有必要针对现有机器人在四轴出线时,外部线缆容易出现缠绕拉扯的问题,提供一种手术机器人的线缆固定装置及机器人。
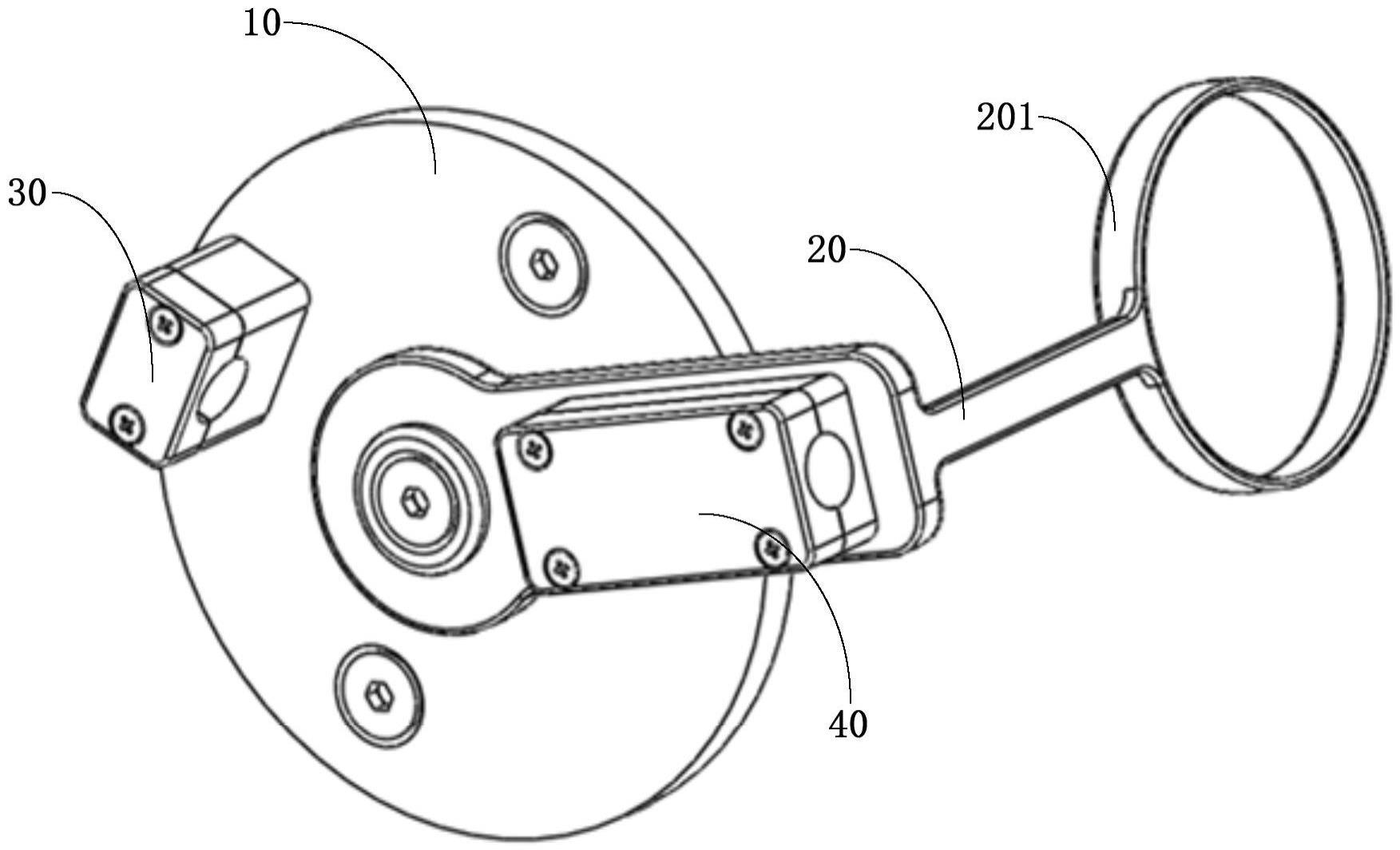
2、本申请提供了一种手术机器人的线缆固定装置,包括:
3、定子;
4、转子,所述转子的一端转动连接在所述定子上;
5、第一线槽,所述第一线槽设置在所述定子上;
6、第二线槽,所述第二线槽设置在所述转子上,且所述第二线槽与所述第一线槽位于所述定子的同侧。
7、在其中一个实施例中,所述转子包括圆环、固定板以及连杆,所述连杆的一端与所述圆环连接,所述连杆的另一端与所述固定板连接;
8、所述固定板转动连接在所述定子上,所述第二线槽设置在所述固定板上。
9、在其中一个实施例中,所述第二线槽包括第一安装座和第一盖板,所述第一安装座安装在所述固定板上,所述第一盖板可拆卸地安装在所述第一安装座背离所述固定板的一侧。
10、在其中一个实施例中,所述手术机器人的线缆固定装置还包括紧固螺钉,所述固定板设置有通孔,所述紧固螺钉穿过所述通孔以将所述固定板与所述定子连接。
11、在其中一个实施例中,所述紧固螺钉与所述通孔间隙配合。
12、在其中一个实施例中,所述手术机器人的线缆固定装置还包括具有弹性的紧固圈,所述紧固圈的一端位于所述通孔内,另一端位于所述固定板背离所述定子的一侧;
13、当所述紧固螺钉穿过所述紧固圈的中心孔与所述定子连接时,所述紧固螺钉的螺帽与所述紧固圈抵接。
14、在其中一个实施例中,所述紧固圈包括同轴连接的第一弹性圈和第二弹性圈,所述第一弹性圈的直径小于所述第二弹性圈的直径,且所述第二弹性圈内部形成的圆的直径沿所述第二弹性圈到所述第一弹性圈的方向逐渐减小;所述第一弹性圈位于所述通孔内,所述第二弹性圈位于所述通孔外部;
15、当所述紧固螺钉穿过所述第二弹性圈的中心孔和所述第一弹性圈的中心孔与所述定子连接时,所述紧固螺钉的螺帽与所述第二弹性圈的内壁抵接。
16、在其中一个实施例中,所述定子朝向所述固定板的一侧设置有凸台,当所述固定板转动连接在所述定子上时,所述固定板朝向所述定子的一侧与所述凸台抵接。
17、在其中一个实施例中,所述第一线槽包括第二安装座和第二盖板,所述第二安装座安装在所述定子上,所述第二盖板可拆卸地安装在所述第二安装座背离所述定子的一侧。
18、本申请还提供了一种手术机器人,包括机器人本体以及如本申请实施例描述中任意一项所述的手术机器人的线缆固定装置;
19、所述定子可拆卸地安装在所述机器人本体的第一运动轴对应的外壳上,所述转子的圆环套设在机器人本体的第二运动轴的外周,其中,所述第一运动轴的转动轴线方向和所述第二运动轴的转动轴线的方向不同。
20、本申请的有益效果包括:
21、本申请提供的手术机器人,当手术机器人的线缆固定装置安装到机器人本体上后,由于第一线槽通过定子安装在机器人本体上的五轴的外壳上,定子不会随着五轴的转动而转动,相对于机器人本体上四轴的出线处位置固定不变,因此,从四轴出线处到第一线槽之间的线缆在机器人本体运动时相对位置不发生变化;由于转子一端转动连接在定子上,另一端套设在六轴的外周,第二线槽固定在转子上,因此,从第一线槽到第二线槽之间的线缆只能够随着五轴的运动而运动,只有一个自由度的运动;从第二线槽到机器人本体上的末端部件的线缆,只能够随着六轴的运动而运动,只有一个自由度的运动,大大限制了线缆的运动空间,降低了线缆缠绕拉扯的问题。
技术特征:
1.一种手术机器人的线缆固定装置,其特征在于,包括:
2.根据权利要求1所述的手术机器人的线缆固定装置,其特征在于,所述转子(20)包括圆环(201)、固定板(202)以及连杆(203),所述连杆(203)的一端与所述圆环(201)连接,所述连杆(203)的另一端与所述固定板(202)连接;
3.根据权利要求2所述的手术机器人的线缆固定装置,其特征在于,所述第二线槽(40)包括第一安装座(401)和第一盖板(402),所述第一安装座(401)安装在所述固定板(202)上,所述第一盖板(402)可拆卸地安装在所述第一安装座(401)背离所述固定板(202)的一侧。
4.根据权利要求2所述的手术机器人的线缆固定装置,其特征在于,所述手术机器人的线缆固定装置还包括紧固螺钉(50),所述固定板(202)设置有通孔(2021),所述紧固螺钉(50)穿过所述通孔(2021)以将所述固定板(202)与所述定子(10)连接。
5.根据权利要求4所述的手术机器人的线缆固定装置,其特征在于,所述紧固螺钉(50)与所述通孔(2021)间隙配合。
6.根据权利要求4所述的手术机器人的线缆固定装置,其特征在于,所述手术机器人的线缆固定装置还包括具有弹性的紧固圈(60),所述紧固圈(60)的一端位于所述通孔(2021)内,另一端位于所述固定板(202)背离所述定子(10)的一侧;
7.根据权利要求6所述的手术机器人的线缆固定装置,其特征在于,所述紧固圈(60)包括同轴连接的第一弹性圈(601)和第二弹性圈(602),所述第一弹性圈(601)的直径小于所述第二弹性圈(602)的直径,且所述第二弹性圈(602)内部形成的圆的直径沿所述第二弹性圈(602)到所述第一弹性圈(601)的方向逐渐减小;所述第一弹性圈(601)位于所述通孔(2021)内,所述第二弹性圈(602)位于所述通孔(2021)外部;
8.根据权利要求2所述的手术机器人的线缆固定装置,其特征在于,所述定子(10)朝向所述固定板(202)的一侧设置有凸台(101),当所述固定板(202)转动连接在所述定子(10)上时,所述固定板(202)朝向所述定子(10)的一侧与所述凸台(101)抵接。
9.根据权利要求1所述的手术机器人的线缆固定装置,其特征在于,所述第一线槽(30)包括第二安装座(301)和第二盖板(302),所述第二安装座(301)安装在所述定子(10)上,所述第二盖板(302)可拆卸地安装在所述第二安装座(301)背离所述定子(10)的一侧。
10.一种手术机器人,其特征在于,包括机器人本体以及如权利要求1~9任意一项所述的手术机器人的线缆固定装置;
技术总结
本申请涉及提供一种线缆固定装置及机器人,该装置包括:定子、转子、第一线槽、第二线槽。本申请提供的上述方案,由于第一线槽通过定子安装在机器人本体上的五轴的外壳上,相对于机器人本体上四轴的出线处位置固定不变,因此,从四轴出线处到第一线槽之间的线缆在机器人本体运动时相对位置不发生变化;由于转子一端转动连接在定子上,另一端套设在六轴的外周,第二线槽固定在转子上,因此,从第一线槽到第二线槽之间的线缆只能够随着五轴的运动而运动,只有一个自由度的运动;从第二线槽到机器人本体上的末端部件的线缆,只能够随着六轴的运动而运动,只有一个自由度的运动,大大限制了线缆的运动空间,降低了线缆缠绕拉扯的问题。
技术研发人员:蔡昆,成建平,王心怡,谢强,汪全全
受保护的技术使用者:武汉联影智融医疗科技有限公司
技术研发日:20221222
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!