连接基座、动力盒、介入手术机器人的制作方法
本申请涉及手术机器人,具体涉及一种连接基座、动力盒、介入手术机器人。
背景技术:
1、介入手术机器人的器械盒和动力盒对接时,需要使器械盒内的功能部件与动力盒内的动力部件对接,以使得动力部件能驱动功能部件完成相应的手术动作。但是,在现有技术中,器械盒和动力盒的对接结构复杂,操作繁琐,不便于快速拆装,而且对接可靠性也较差。
技术实现思路
1、有鉴于此,本申请提供了一种连接基座、动力盒、介入手术机器人,其能够实现器械盒和动力盒对接的便捷性和可靠性。
2、为了达到上述目的,本申请提供如下技术方案:
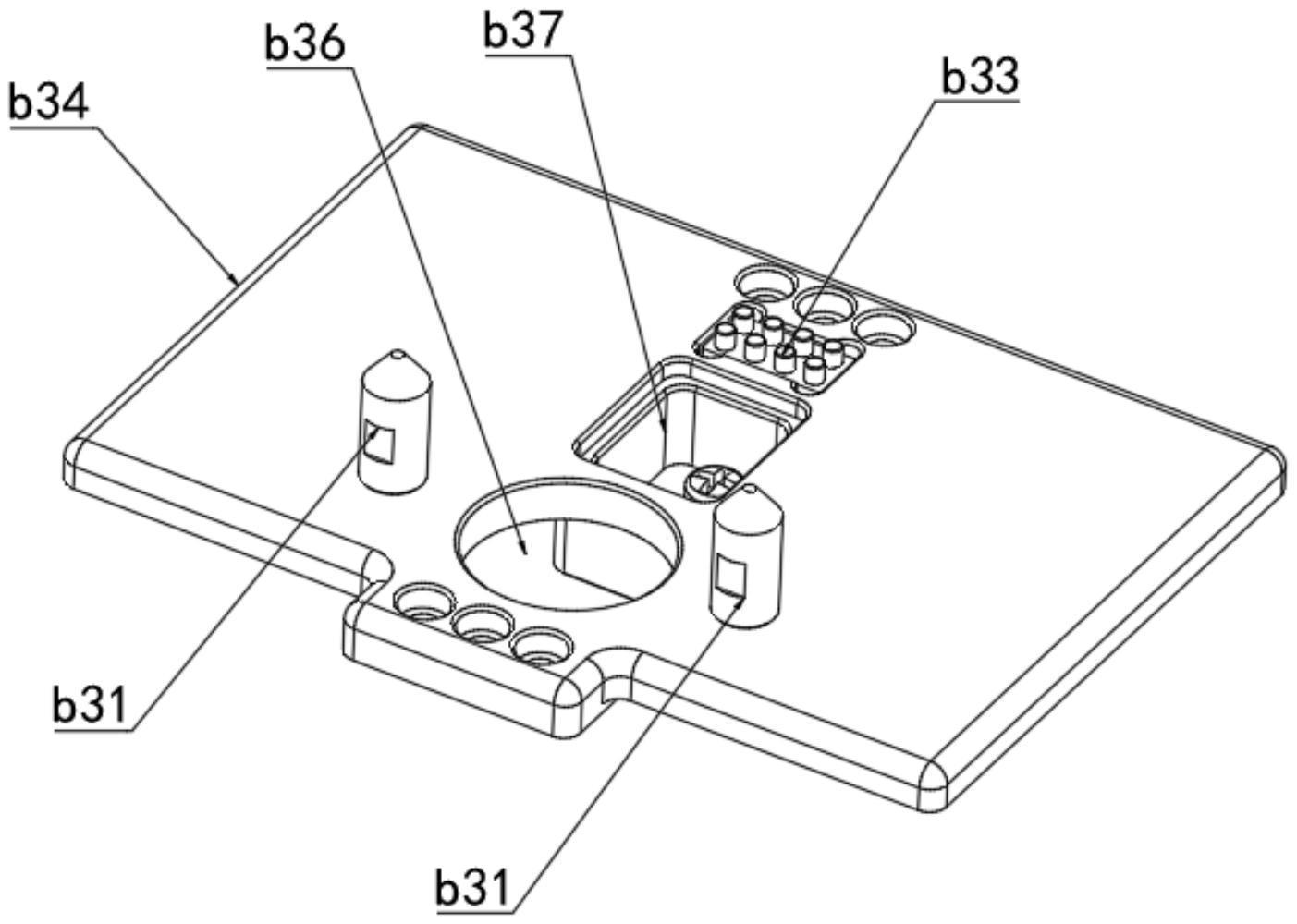
3、一种连接基座,设置在动力盒上,并用于连接导丝推送组件,包括:
4、基座本体,滑动的设置在所述动力盒的表面;
5、第一定位结构,设置在所述基座本体上;
6、第二定位结构,设置在所述导丝推送组件的底部,并能与所述第一定位结构匹配,以实现所述基座本体与所述导丝推送组件的定位;
7、第二电连接件,设置在所述基座本体上,并能与设置在所述导丝推送组件底部的第一电连接件接触以实现电连接。
8、可选的,上述连接基座中,还包括第二磁性件,所述第二磁性件能与设置在所述导丝推送组件底部的第一磁性件吸附。
9、可选的,上述连接基座中,所述第二磁性件设置在所述基座本体的靠近所述动力盒的内表面上,且所述内表面上设置有用于容纳所述第二磁性件的容纳槽。
10、可选的,上述连接基座中,所述第二磁性件为多个,并分别位于所述第5二电连接件设置位置的两侧;全部所述第二磁性件与多个所述第一磁性件一
11、对一吸附。
12、可选的,上述连接基座中,所述基座本体与设置在动力盒内的导丝驱动组件的移动座固定连接,且所述基座本体上开设有允许所述导丝驱动组件的动力输出轴穿过的通孔。
13、0可选的,上述连接基座中,所述基座本体上设置有连接槽,第一螺钉穿
14、过所述连接槽以与导丝驱动组件的移动座连接。
15、可选的,上述连接基座中,所述第一定位结构为凸出的设置在所述基座本体上的定位销,所述第二定位结构为允许所述定位销插入的定位孔;
16、其中,所述定位销的与所述基座本体接触的底面上开设有螺纹孔,第二5螺钉穿过所述基座本体并与所述螺纹孔连接,以将所述定位销固定在所述基
17、座本体上。
18、可选的,上述连接基座中,所述动力盒的表面设置有与器械盒的滑槽同向设置的导向槽,所述基座本体设置在所述导向槽内并能在所述导向槽内滑动。
19、0一种动力盒,包括盒本体和设置在所述盒本体上的连接基座,所述连接
20、基座为上述任一项所述的连接基座。
21、可选的,上述动力盒中,所述盒本体内设置有导丝驱动组件,所述导丝驱动组件包括:
22、安装架;
23、5导丝转动结构,滑动设置在所述安装架上,并能与所述导丝推送组件连接,以驱动所述导丝推送组件的导丝转动件转动;
24、导丝移动结构,设置在所述安装架上,并能驱动所述导丝转动结构移动,以通过所述导丝转动结构带动所述导丝推送组件移动;
25、其中:
26、所述导丝移动结构包括:第一动力结构,固定设置在安装架上,并用于提供移动动力;同步带结构,包括转动设置在安装架上的两个同步带轮,以及套设在所述两个同步带轮上的同步带,所述第一动力结构的动力输出轴与所述同步带轮连接,以驱动所述同步带运行;
27、所述导丝移动结构还包括:移动导轨,设置在所述安装架上,且与所述同步带平行;移动滑块,滑动的设置在所述移动导轨上,且与所述连接基座连接;移动座,用于安装所述导丝转动结构,并设置在所述移动滑块上;同步连接件,固定连接所述移动座和所述同步带,以使运行的所述同步带能通过移动座带动所述导丝转动结构移动。
28、一种介入手术机器人,包括上述的动力盒。
29、本申请提供的连接基座设置在动力盒上,并能够与器械盒内的导丝推送组件连接,在器械盒和动力盒对接时,设置在基座本体上的第一定位结构能够与开设在导丝推送组件底部的第二定位结构匹配连接,以实现基座本体与导丝推送组件的定位,进而在器械盒与动力盒定位时实现功能件和动力盒的定位;同时设置在基座本体上的第二电连接件与设置在导丝推送组件底部的第一电连接件接触并电连接,以使得导丝推送组件与动力盒内的动力件电连接,进而有利于实现导丝推送组件的功能;而且,基座本体滑动设置在动力盒上,通过基座本体相对于动力盒的滑动,进而带动导丝推动组件相对于动力盒以及器械盒的滑动,以便于实现对导丝的推送。通过采用上述结构,能够简单、快捷的实现器械盒和动力盒的对接,给快速拆装提供了便利,而且也能够使对接可靠性得到提升。
技术特征:
1.一种连接基座,其特征在于,设置在动力盒上,并用于连接导丝推送组件,包括:
2.根据权利要求1所述的连接基座,其特征在于,还包括第二磁性件,所述第二磁性件能与设置在所述导丝推送组件底部的第一磁性件吸附。
3.根据权利要求2所述的连接基座,其特征在于,所述第二磁性件设置在所述基座本体的靠近所述动力盒的内表面上,且所述内表面上设置有用于容纳所述第二磁性件的容纳槽。
4.根据权利要求2所述的连接基座,其特征在于,所述第二磁性件为多个,并分别位于所述第二电连接件设置位置的两侧;全部所述第二磁性件与多个所述第一磁性件一对一吸附。
5.根据权利要求1所述的连接基座,其特征在于,所述基座本体与设置在动力盒内的导丝驱动组件的移动座固定连接,且所述基座本体上开设有允许所述导丝驱动组件的动力输出轴穿过的通孔。
6.根据权利要求1所述的连接基座,其特征在于,所述基座本体上设置有连接槽,第一螺钉穿过所述连接槽以与导丝驱动组件的移动座连接。
7.根据权利要求1所述的连接基座,其特征在于,所述第一定位结构为凸出的设置在所述基座本体上的定位销,所述第二定位结构为允许所述定位销插入的定位孔;
8.根据权利要求1所述的连接基座,其特征在于,所述动力盒的表面设置有与器械盒的滑槽同向设置的导向槽,所述基座本体设置在所述导向槽内并能在所述导向槽内滑动。
9.一种动力盒,其特征在于,包括盒本体和设置在所述盒本体上的连接基座,所述连接基座为权利要求1-8中任一项所述的连接基座。
10.根据权利要求9所述的动力盒,其特征在于,所述盒本体内设置有导丝驱动组件,所述导丝驱动组件包括:
11.一种介入手术机器人,其特征在于,包括权利要求9或10所述的动力盒。
技术总结
本申请提供了一种连接基座、动力盒、介入手术机器人,连接基座设置在动力盒上,并用于连接导丝推送组件,包括:基座本体,滑动的设置在所述动力盒的表面;第一定位结构,设置在所述基座本体上;第二定位结构,设置在所述导丝推送组件的底部,并能与所述第二定位结构匹配,以实现所述基座本体与所述导丝推送组件的定位;第二电连接件,设置在所述基座本体上,并能与设置在所述导丝推送组件底部的第一电连接件接触以实现电连接。通过采用上述结构,能够简单、快捷的实现器械盒和动力盒的对接,给快速拆装提供了便利,而且也能够使对接可靠性得到提升。
技术研发人员:谢琦
受保护的技术使用者:广东美的制冷设备有限公司
技术研发日:20221228
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!