用于对外科机器人系统的相机组件进行自动聚焦的系统和方法与流程
背景技术:
1、本公开涉及微创外科装置和相关方法,更具体地说,涉及可插入患者体内以在其中执行选定手术的机器人外科系统。
2、自20世纪90年代初问世以来,微创手术领域发展迅速。虽然微创外科手术极大地改善了患者预后,但这种改善是以外科医生精确和轻松操作的能力为代价的。在腹腔镜检查期间,外科医生必须通过患者腹壁中的小切口插入腹腔镜器械。由于腹腔镜器械不能在不损伤腹壁的情况下左右移动,因此工具插入穿过腹壁这一性质限制了腹腔镜器械的运动。标准腹腔镜器械限于四个运动轴线。这四个运动轴线是器械进出套管针的移动(轴线1)、器械在套管针内的旋转(轴线2)以及套管针在两个平面内的角移动,同时维持套管针进入腹腔的枢轴点(轴线3和4)。二十多年来,大多数微创外科手术都是在只有这四个运动自由度的情况下执行的。
3、现有的机器人外科装置试图解决这些问题中的许多问题。一些现有的机器人外科装置复制了在器械的端部处具有附加的自由度的非机器人腹腔镜外科手术。然而,即使对外科手术进行了许多昂贵的改变,现有的机器人外科装置在使用它们的大多数手术中也未能提供改善的患者预后。另外,现有的机器人装置在外科医生和外科端部执行器之间产生增加的间隔。由于外科医生对由机器人装置施加的运动和力的误解,这种增加的间隔造成伤害。因为人类操作者不熟悉许多现有机器人装置的自由度,所以外科医生在对患者进行手术之前必须在机器人模拟器上进行大量训练,以使造成意外伤害的可能性最小化。
4、典型的机器人系统可以包括一个或多个机械臂和一个或多个相关联的相机。为了控制现有的机器人系统,外科医生坐在控制台前,用他或她的手和脚控制操纵器,从而控制相机和机械臂。此外,相机可以保持在半固定位置,并通过外科医生的脚和手的组合运动来移动。这些视场有限的半固定相机导致术野难以可视化。
5、在常规的外科机器人系统中,有多种方式将相机聚焦在预期的外科部位。典型地和常规地,外科医生需要使用手动拨盘或者基于系统的自动聚焦特征仅基于从相机中的图像传感器接收到的图像数据来调整焦点。医学领域中的典型自动聚焦机制也可以采用相位检测自动聚焦、飞行时间(光反射)或某一基于光的估计方法。
6、这些常规类型的系统的缺点是,它们需要外科医生暂停外科规程并手动改变相机的焦距。这使得外科医生在外科规程期间分心。在采用自动聚焦技术的系统中,相机的焦点或视场经常不能对准或覆盖外科部位的需要由外科医生观察的实际部分,并且需要较大的景深。采用较大景深的常规相机需要更多的光线,并且因此总分辨率较低。
技术实现思路
1、在本公开的机器人外科系统中,该系统采用相机组件的相机的位置和机械臂的抓钳或端部执行器的位置来确定相机的视场和焦距或焦点。通过使用端部执行器相对于相机的位置信息,本公开的系统可以确定相机的焦距和焦点,同时允许外科医生观察外科部位的重要的或外科医生希望观察的部分,而不必仅仅依赖于来自相机的图像数据。因此,该系统具有更精确的聚焦和更少的假阳性,并且进一步具有持续保持期望视场聚焦的能力。
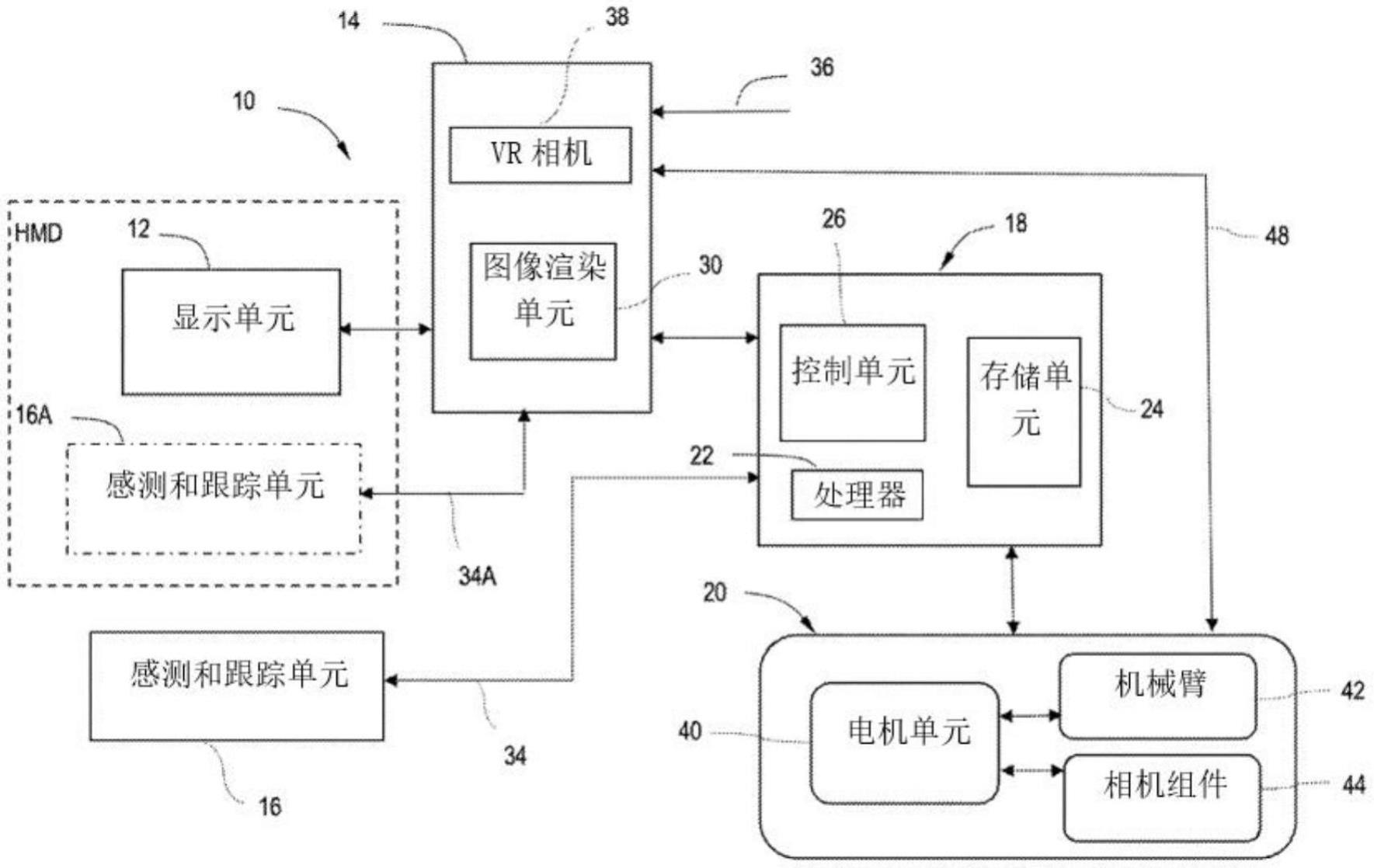
2、根据一个实施方案,本公开提供了一种外科机器人系统,所述外科机器人系统包括传感器单元、控制器以及机器人子系统。所述机器人子系统与所述传感器单元和所述控制器通信。此外,所述机器人子系统包括:多个机械臂,每个机械臂在其远侧端部处具有端部执行器;以及相机组件,所述相机组件具有至少两个相机和自动聚焦单元,所述自动聚焦单元被配置为自动聚焦所述至少两个相机中的每个相机的镜头。所述控制器可以被配置为基于从所述传感器单元接收到的所述相机和所述机械臂的状态信息来计算期望焦距。作为响应,所述自动聚焦单元可以被配置为基于所述期望焦距来自动聚焦所述至少两个相机中的每个相机的所述镜头。
3、所述状态信息可以包括从每个相机到所述机械臂的在外科医生的视场内的每个端部执行器的距离。此外,所述状态信息可以包括每个相机和每个端部执行器的位置信息和姿态信息。基于计算出的期望焦距,所述控制器可以被配置为根据特定焦深来确定聚焦命令,并且将所述聚焦命令传输到所述自动聚焦单元。作为响应,所述自动聚焦单元可以被配置为调整每个相机的物理焦距以聚焦所述相机中的每个相机的所述镜头。
4、此外,所述控制器可以被配置为对所述期望焦距进行滤波以减少聚焦数据的快速变化。用于所述滤波的滤波器的强度可以基于外科医生的头部运动的幅度而改变。还可以针对所述相机中的每个相机计算不同的期望焦距。可以使用加权算法来进一步计算所述期望焦距。在所述加权算法中,所述机械臂中的每个机械臂可以被不同地加权。每个机械臂的权重是基于系统参数的函数。
5、特别地,每个机械臂可以包括多个关节。这些关节可以包括肩关节、肘关节以及腕关节。因此,所述系统参数可以包括距每个相机的视场中的每个端部执行器中心的距离、每个端部执行器的状态以及所述肘关节的位置。在一个实施方案中,焦点调整速度可以随着每个端部执行器从目标位置向外移动而提高,并且可以随着每个端部执行器朝向所述目标位置移动而降低。
6、根据另一实施方案,本公开提供了一种机器人子系统,所述机器人子系统包括:多个机械臂,每个机械臂在其远侧端部处具有端部执行器;以及相机组件。所述相机组件可以包括至少两个相机、控制器以及自动聚焦单元,所述自动聚焦单元被配置为自动聚焦所述相机中的每个相机的镜头。所述控制器可以被配置为基于从传感器单元接收到的所述至少两个相机和所述多个机械臂的状态信息来计算期望焦距。作为响应,所述自动聚焦单元可以被配置为基于所述期望焦距来自动聚焦所述至少两个相机中的每个相机的所述镜头。
7、焦点调整速度随着所述机械臂从目标位置向外移动而提高,并且随着所述机械臂朝向所述目标位置向内移动而降低。此外,所述状态信息包括以下各项中的至少一项:从每个相机到所述多个机械臂的在外科医生的视场内的每个端部执行器的距离,以及所述至少两个相机和所述多个机械臂的每个端部执行器的位置信息和姿态信息。
技术特征:
1.一种外科机器人系统,所述外科机器人系统包括:
2.如权利要求1所述的外科机器人系统,其中:
3.如权利要求2所述的外科机器人系统,其中所述状态信息包括从每个相机到所述多个机械臂的在外科医生的视场内的每个端部执行器的距离。
4.如权利要求2所述的外科机器人系统,其中所述状态信息包括每个相机和每个机械臂的所述端部执行器的位置信息和姿态信息。
5.如权利要求2所述的外科机器人系统,其中基于计算出的期望焦距,所述控制器被配置为根据特定焦深来确定聚焦命令。
6.如权利要求5所述的外科机器人系统,其中所述控制器被配置为将所述聚焦命令传输到所述自动聚焦单元,并且作为响应,所述自动聚焦单元被配置为调整每个相机的物理焦距以聚焦每个相机的所述镜头。
7.如权利要求5所述的外科机器人系统,其中所述控制器被配置为对所述期望焦距进行滤波以减少聚焦数据的快速变化。
8.如权利要求7所述的外科机器人系统,其中用于对所述期望焦距进行滤波的滤波器的强度基于外科医生的头部运动的幅度而改变。
9.如权利要求2所述的外科机器人系统,其中针对所述至少两个相机中的每个相机计算不同的期望焦距。
10.如权利要求2所述的外科机器人系统,其中使用加权算法来进一步计算所述期望焦距。
11.如权利要求10所述的外科机器人系统,其中在所述加权算法中,每个机械臂被不同地加权。
12.如权利要求11所述的外科机器人系统,其中每个机械臂的权重是基于系统参数的函数。
13.如权利要求12所述的外科机器人系统,其中每个机械臂包括多个关节。
14.如权利要求13所述的外科机器人系统,其中所述多个关节包括肩关节、肘关节以及腕关节。
15.如权利要求14所述的外科机器人系统,其中所述系统参数包括距每个相机的视场中的每个端部执行器中心的距离、每个端部执行器的状态以及所述肘关节的位置。
16.如权利要求2所述的外科机器人系统,其中焦点调整速度随着每个端部执行器从目标位置向外移动而提高。
17.如权利要求2所述的外科机器人系统,其中焦点调整速度随着每个端部执行器朝向目标位置移动而降低。
18.一种机器人子系统,所述机器人子系统包括:
19.如权利要求18所述的机器人子系统,其中焦点调整速度随着所述机械臂从目标位置向外移动而提高,并且随着所述机械臂朝向所述目标位置向内移动而降低。
20.如权利要求18所述的机器人子系统,其中所述状态信息包括以下各项中的至少一项:从每个相机到所述多个机械臂的在外科医生的视场内的每个端部执行器的距离,以及所述至少两个相机和所述多个机械臂的每个端部执行器的位置信息和姿态信息。
技术总结
一种外科机器人系统包括传感器单元、控制器以及机器人子系统。该机器人子系统与该传感器单元和该控制器通信。此外,该机器人子系统包括多个机械臂,每个机械臂在其远侧端部处具有端部执行器。该机器人子系统还包括相机组件,该相机组件具有至少两个相机和自动聚焦单元,该自动聚焦单元自动聚焦该相机中的每个相机的镜头。
技术研发人员:J·基南,S·哈利法
受保护的技术使用者:维卡瑞斯外科手术股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!