放射线摄像装置、放射线摄像系统和放射线摄像装置的控制方法与流程
本发明涉及一种放射线摄像装置、放射线检测器和放射线摄像装置的控制方法。
背景技术:
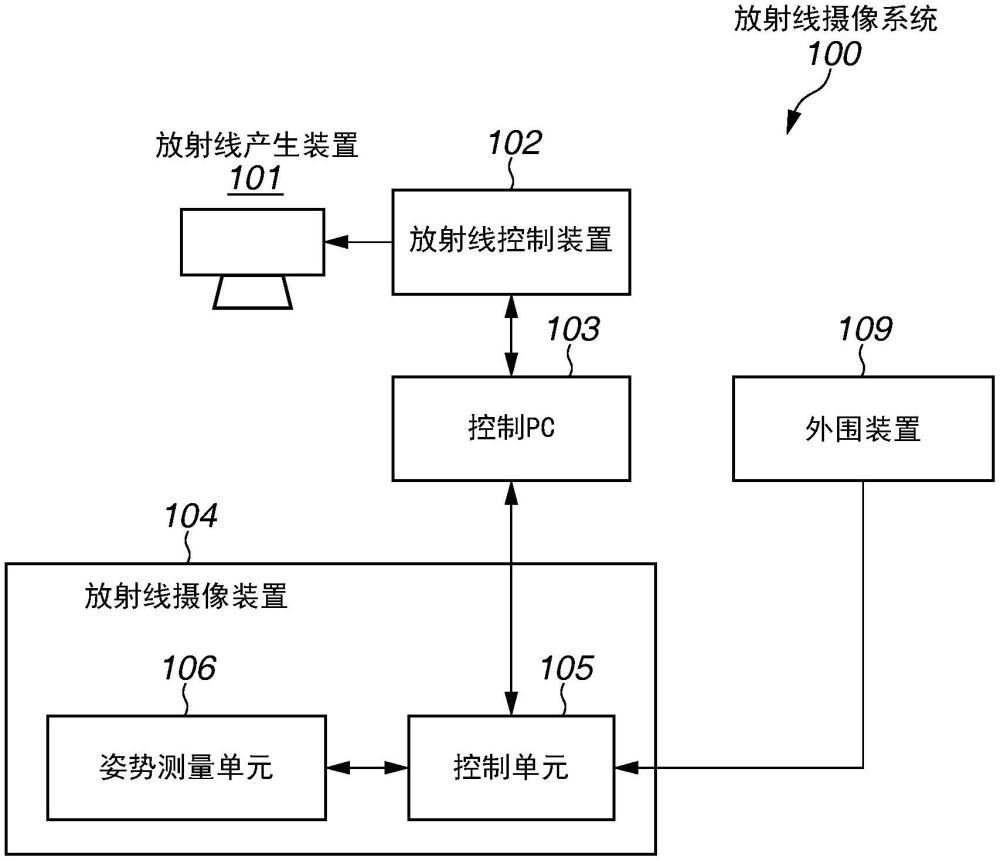
1、使用半导体材料形成的平板检测器(fpd)被广泛用作用于医学图像诊断或使用诸如x射线的放射线的无损检查的放射线检测器。已经使用了使用上述放射线检测器和产生放射线的放射线产生装置的组合的放射线摄像装置。
2、作为前述放射线摄像装置的功能,通过计算放射线产生装置和放射线检测器的姿势并显示计算出的姿势来辅助从放射线产生装置发射的放射线的照射场与放射线检测器的入射表面对准的功能已投入实际使用。
3、作为用于计算放射线产生装置和放射线检测器的姿势的方法,放射线产生装置和放射线检测器均配设有加速度传感器或陀螺仪传感器,并且基于加速度传感器输出的加速度值和陀螺仪传感器输出的角速度值来计算放射线产生装置和放射线检测器的姿势。
4、例如,专利文献1论述了一种放射线摄像系统,该放射线摄像系统包括辅助控制单元和配设于放射线摄像装置并使用加速度传感器或陀螺仪传感器的倾斜角检测单元,该辅助控制单元被构造为基于来自配设于放射线摄像装置并使用加速度传感器或陀螺仪传感器的倾斜角检测单元的值来进行摄像辅助处理。
5、引用列表
6、专利文献
7、专利文献1:日本特开第2018-007923号公报
技术实现思路
1、技术问题
2、由于加速度传感器和陀螺仪传感器的输出值包含误差,因此有时难以使用这些传感器的输出值来计算放射线摄像装置的正确姿势。
3、本发明旨在通过校正从用作放射线摄像装置的姿势测量单元的加速度传感器或陀螺仪传感器输出并且包含误差的输出值来提高放射线产生装置和放射线摄像装置相互对准的准确度。
4、解决问题的方案
5、本发明要解决的问题通过如下的放射线摄像装置来解决,该放射线摄像装置包括姿势测量单元,其被构造为测量关于放射线摄像装置的姿势的信息,其中,姿势测量单元基于放射线摄像的操作来进行姿势测量单元的输出值的校正。
6、本发明的有益效果
7、本发明可以通过校正从用作放射线摄像装置的姿势测量单元的加速度传感器或陀螺仪传感器输出并且包含误差的输出值来提高放射线产生装置和放射线摄像装置相互对准的准确度。
技术特征:
1.一种放射线摄像装置,其包括:姿势测量单元,其被构造为测量关于放射线摄像装置的姿势的信息,
2.根据权利要求1所述的放射线摄像装置,其中,姿势测量单元在放射线摄像装置为静止的情况下进行校正。
3.根据权利要求2所述的放射线摄像装置,所述放射线摄像装置还包括:控制单元,其被构造为进行控制以使用放射线摄像装置进行放射线摄像,
4.根据权利要求3所述的放射线摄像装置,
5.根据权利要求4所述的放射线摄像装置,所述放射线摄像装置还包括:光电转换元件,其被构造为将基于放射线的光转换为电荷,
6.根据权利要求4所述的放射线摄像装置,所述放射线摄像装置还包括:光电转换元件,其被构造为将基于放射线的光转换为电荷,
7.根据权利要求2所述的放射线摄像装置,其中,在基于输出值检测到放射线摄像装置为静止的情况下,姿势测量单元进行校正。
8.根据权利要求7所述的放射线摄像装置,
9.根据权利要求8所述的放射线摄像装置,其中,姿势测量单元通过从输出值减去所述微分值来进行校正。
10.根据权利要求2所述的放射线摄像装置,其中,姿势测量单元基于稳定在预定位置处的放射线摄像装置的预先存储的已知姿势和由控制单元计算出的放射线摄像装置的当前姿势来进行校正。
11.根据权利要求10所述的放射线摄像装置,其中,在基于已知姿势和当前姿势检测到放射线摄像装置为静止的情况下,姿势测量单元进行校正。
12.根据权利要求10所述的放射线摄像装置,其中,控制单元基于已知姿势和输出值来计算放射线摄像装置从已知姿势的移动量。
13.一种放射线摄像系统,其包括:
14.一种放射线摄像装置的控制方法,所述控制方法包括:
15.根据权利要求14所述的放射线摄像装置的控制方法,所述控制方法还包括:
16.一种程序,使计算机进行根据权利要求15所述的控制方法。
17.一种计算机可读记录介质,其记录根据权利要求16所述的程序。
技术总结
根据本发明的放射线摄像装置包括:姿势测量单元,其被构造为测量关于放射线摄像装置的姿势的信息,其中,姿势测量单元基于放射线摄像的操作来进行姿势测量单元的输出值的校正。
技术研发人员:铃木魁,佃明,内藤雄一
受保护的技术使用者:佳能株式会社
技术研发日:
技术公布日:2024/3/5
- 还没有人留言评论。精彩留言会获得点赞!