一种内耳诊疗机器人及使用方法
本发明涉及机器人领域,具体涉及一种内耳诊疗机器人及使用方法。
背景技术:
1、内耳的病理状态可能伴有特征性生物标记物的改变,需要对淋巴液采样,以判断内耳的病理状态。目前临床上缺乏可普及的微创淋巴液采样手段,仅在部分患者的手术过程中实现淋巴液采样,缺乏普适性,使得病理情况下的内耳生物标记物研究始终停留在动物模型阶段。
2、同时,血-迷路屏障的存在使得全身给药难以在内耳维持有效药物浓度,常用的中耳鼓室给药也存在有效浓度不确定的局限,内耳注射、微导管给药等类似技术对操作要求极高,仍主要停留在临床前阶段。
技术实现思路
1、本发明的目的是提供一种经自然腔道的、有效、精准、微创的内耳微创诊疗装置,实现采样分析诊断及局部药物治疗,提升内耳疾病的诊断及治疗效果。
2、为了达到上述目的,本发明提供了一种内耳诊疗机器人,包括:
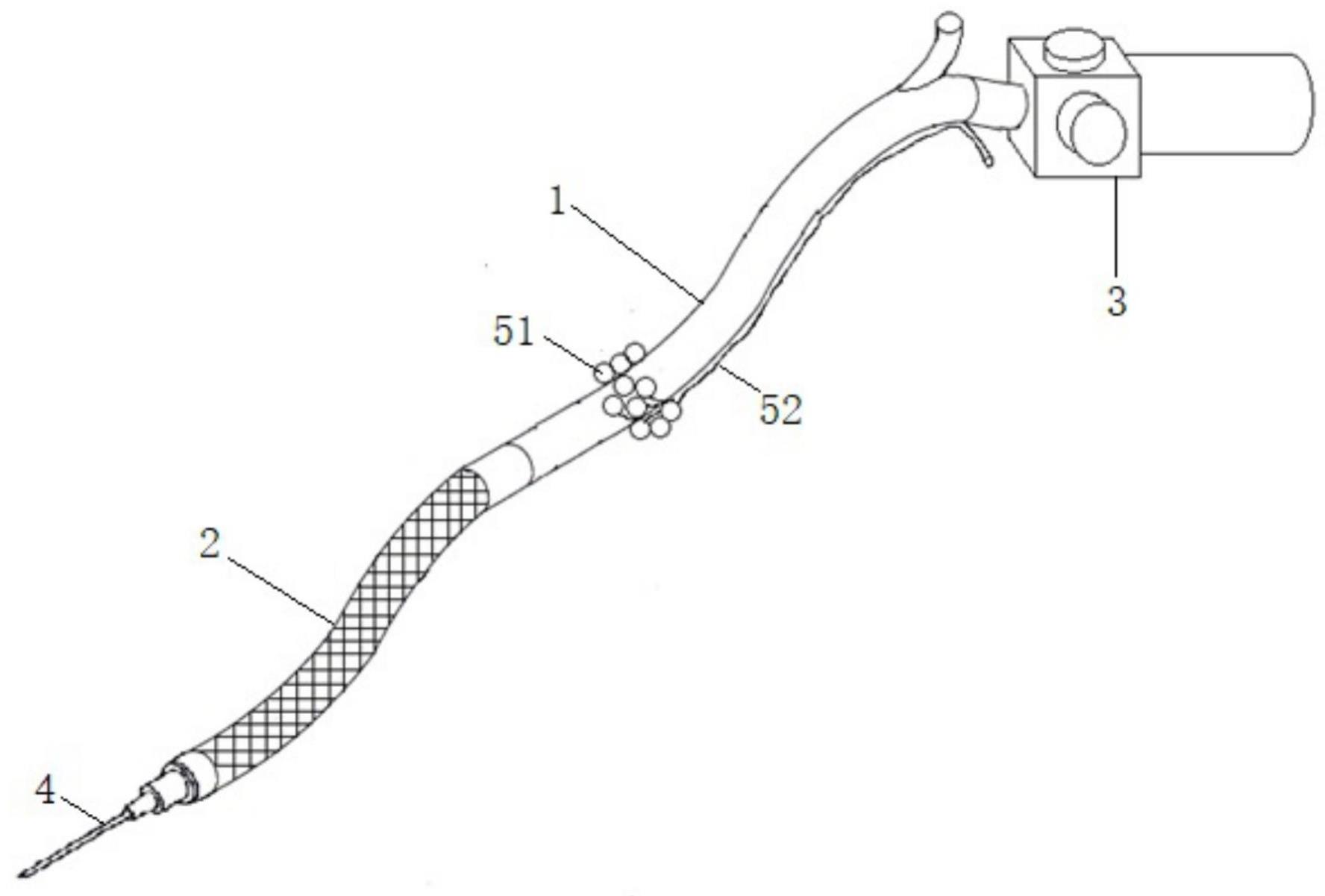
3、可塑形的软管,所述软管的外径小于自然腔道的内径,所述软管内至少设有一贯通的操作通道;
4、连续体,设于所述软管内,能由所述软管的前端伸出所述软管外;
5、穿刺组件,包括由前端至后端依次连通的穿刺针、储液腔和柔性管道,使用状态下,所述穿刺组件置入所述操作通道内,所述穿刺针由所述连续体的前端伸出所述操作通道外;
6、稳定装置,设于所述软管的外部,用于将所述软管固定于自然腔道内,使所述软管不与自然腔道发生相对滑动;
7、控制系统,用于控制所述软管、所述连续体和所述穿刺组件的运动。
8、可选地,自然腔道为外耳道,所述稳定装置为若干球囊,向每个所述球囊中注射气体或液体,使所述球囊膨胀,支撑所述软管在外耳道内保持稳定。
9、可选地,所述球囊连接于所述软管的外表面,在所述软管周向上相邻的任意两个球囊间的距离,不大于所述软管周长的一半。
10、可选地,所述稳定装置为一靠近所述软管后端的阻挡件,所述阻挡件的尺寸大于自然腔道的内径。
11、可选地,所述穿刺针的前端为一尖端,所述穿刺针内设有与所述储液腔连通的采样通道。
12、可选地,所述柔性管道的后端连接气泵,所述储液腔中预先装有药液,通过所述气泵,使所述药液经由所述穿刺针的采样通道向前端注射;或,
13、所述柔性管道的后端连接负压装置,将液体由所述穿刺针的采样通道抽吸至所述储液腔中。
14、可选地,所述软管内,设有光导纤维。
15、可选地,所述软管内,设有成像系统通路。
16、可选地,所述控制系统通过线驱动、磁驱动或气动的方式,控制所述连续体和/或所述穿刺针针头的运动。
17、本发明还提供了一种上述内耳诊疗机器人的使用方法,包括:
18、步骤一,将软管置入自然腔道内,对软管塑形,以使其与自然腔道的弯曲程度适配;通过稳定装置软管固定于自然腔道内,使软管不与自然腔道发生相对滑动;
19、步骤二,控制连续体由软管的前端伸出软管外;
20、步骤三,控制穿刺针的针头伸出连续体外,通过穿刺针采样或给药;
21、步骤四,将软管退出自然腔道。
22、本发明的有益效果为:
23、(1)本发明的内耳诊疗机器人经自然腔道及鼓膜穿刺,能够进入内耳中,采集内耳的淋巴液或向内耳进行药物注射,补充了目前对内耳疾病的精确诊治的空白。本发明的连续体结构能够绕过听骨链等结构,到达圆窗膜进行操作,并能控制穿刺针在内耳的狭窄空间内灵活运动,操作更加简便。
24、(2)本发明的软管具有可塑性,能够适应弯曲的自然腔道结构,同时,软管本身还具有一定的硬度,为其中的操作通道提供稳定的操作环境。
25、(3)本发明在软管的外部设有稳定装置,该稳定装置能够起到稳定、支撑软管的作用,使软管到达合适位置后,不会从自然腔道中滑脱或晃动。
技术特征:
1.一种内耳诊疗机器人,其特征在于,包括:
2.如权利要求1所述的内耳诊疗机器人,其特征在于,自然腔道为外耳道,所述稳定装置为若干球囊,向每个所述球囊中注射气体或液体,使所述球囊膨胀,支撑所述软管在外耳道内保持稳定。
3.如权利要求2所述的内耳诊疗机器人,其特征在于,所述球囊连接于所述软管的外表面,在所述软管周向上相邻的任意两个球囊间的距离,不大于所述软管周长的一半。
4.如权利要求1所述的内耳诊疗机器人,其特征在于,所述稳定装置为一靠近所述软管后端的阻挡件,所述阻挡件的尺寸大于自然腔道的内径。
5.如权利要求1所述的内耳诊疗机器人,其特征在于,所述穿刺针的前端为一尖端,所述穿刺针内设有与所述储液腔连通的采样通道。
6.如权利要求5所述的内耳诊疗机器人,其特征在于,
7.如权利要求1所述的内耳诊疗机器人,其特征在于,所述软管内,设有光导纤维。
8.如权利要求1所述的内耳诊疗机器人,其特征在于,所述软管内,设有成像系统通路。
9.如权利要求1所述的内耳诊疗机器人,其特征在于,所述控制系统通过线驱动、磁驱动或气动的方式,控制所述连续体和/或所述穿刺针针头的运动。
10.一种如权利要求1-9任意一项所述的内耳诊疗机器人的使用方法,其特征在于,包括:
技术总结
本发明公开了一种内耳诊疗机器人及使用方法,内耳诊疗机器人包括:可塑形的软管,所述软管的外径小于自然腔道的内径,所述软管内至少设有一贯通的操作通道;连续体,设于所述软管内,能由所述软管的前端伸出所述软管外;穿刺组件,包括由前端至后端依次连通的穿刺针、储液腔和柔性管道;稳定装置,设于所述软管的外部,用于将所述软管固定于自然腔道内,使所述软管不与自然腔道发生相对滑动;控制系统,用于控制所述软管、所述连续体和所述穿刺组件的运动。本发明的内耳诊疗机器人能够有效、精准地实现采样分析诊断及局部药物治疗,提升了内耳疾病的诊断及治疗效果。
技术研发人员:贾欢,吴皓,谭皓月
受保护的技术使用者:上海交通大学医学院附属第九人民医院
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!