一种手部辅助康复机器人
本发明涉及医疗康复器械,尤其涉及一种手部辅助康复机器人。
背景技术:
1、手是人体运动系统中最重要也是最复杂的器官,能实现各种复杂的动作,使用和操作各类工具。
2、但是人体手部功能也是极易受损的,其中手部外伤和神经损伤是最主要的致损原因。手外伤常会导致患者手部功能缺失,无法完成正常手部运动。对于手部运动障碍患者,目前大多数的治疗还是得依靠医师对其实施的患肢持续性被动训练,通过持续的重复性被动康复训练辅助患者修复受损的神经。
3、传统的软体手部康复机器人具有结构柔顺、适应性好、控制简单、价格低廉等优点,使得患者的治疗变得更加简单和方便。公开号为cn106309083a的发明创造公开了一种emg控制的气动软体康复机械手,公开号为cn111067753a的发明创造公开了手指手腕一体式软体康复手套,上述专利方案所描述的软体手部康复装置在每根手指上均只能实现单侧的弯曲运动,通常只能驱动患者的手指弯曲握紧,无法帮助患者手指张开伸展,使用效果不佳。
技术实现思路
1、有鉴于此,有必要提供一种手部辅助康复机器人,用以解决现有软体手部康复装置只能实现单侧弯曲运动的问题。
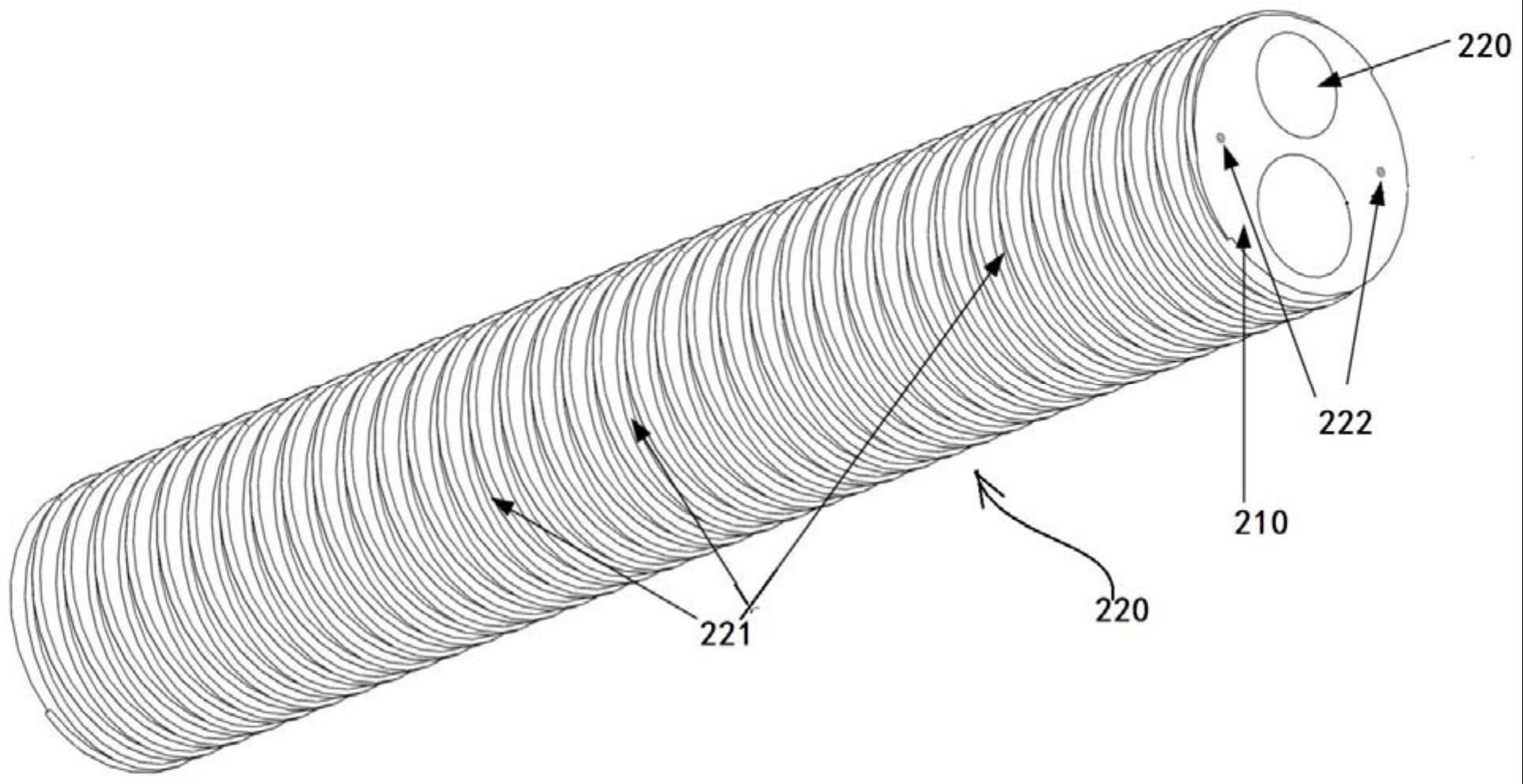
2、本发明提供一种手部辅助康复机器人,包括:全指手套以及不同长度的肌肉软体,五个所述肌肉软体分别与所述全指手套的五个手指套对应配合连接,所述肌肉软体安装于手指套的掌背侧;所述肌肉软体包括柔性基体以及设置于柔性基体中的两伸缩腔,通过调节两所述伸缩腔中的气压强弱,从而驱动穿戴所述全指手套的手指进行双侧弯曲运动。
3、进一步的,两所述伸缩腔相对所述手指套的投影重合设置,两所述伸缩腔间隔设置且位于所述柔性基体的中心两侧。
4、进一步的,所述伸缩腔沿所述肌肉软体的长度方向设置,所述伸缩腔的截面为规则图形。
5、进一步的,远离所述手指套一侧的所述伸缩腔的截面面积大于另一所述所述伸缩腔的截面面积。
6、进一步的,还包括供气组件,所述供气组件包括接头、输气管以及气压调节单元,所述接头的一端与所述伸缩腔固定连接,所述接头的另一端与所述输气管可拆卸连接,所述气压调节单元与所示输气管的另一端连通,所述能够控制输气管中的气压大小。
7、进一步的,所述柔性基体内设有纤维约束单元,所述纤维约束单元包括周向约束线,所述周向约束线环绕所述柔性基体设置且嵌入所述柔性基体中。
8、进一步的,所述纤维约束单元还包括轴向约束线,所述轴向约束线沿所述柔性基体的长度方向设置且嵌入所述柔性基体中。
9、进一步的,所述柔性基体的表面涂覆有保护层。
10、进一步的,其特征在于,所述肌肉软体与手指套之间设有固定模块,所述固定模块包括固定件,所述固定件设置于手指套相对手指关节处的两侧,所述肌肉软体与手指套被所述固定件多点绑定。
11、进一步的,所述手指套的端部设有压力传感器,所述压力传感器与所述手指套固定连接。
12、与现有技术相比,本发明具有的有益效果为:
13、本发明的一种手部辅助康复机器人,包括:全指手套以及不同长度的肌肉软体,全指手套为织制手套,手套戴在需要康复训练的人手上。五个肌肉软体分别与全指手套的五个手指套对应配合连接,肌肉软体安装于手指套的掌背侧,肌肉软体的弯曲变形可以带动手指弯曲运动。肌肉软体包括柔性基体以及设置于柔性基体中的两伸缩腔,通过管道调节伸缩腔中的气压强弱,气压强的伸缩腔的变形程度大于气压强的伸缩腔的变形程度,伸缩腔之间的压力差可以驱动柔性基体向一侧弯折,通过调节伸缩腔的内部压力,可以驱动手指套向指背或者指面侧弯折,从而为人手的抓握和伸展两个进程提供动力。
技术特征:
1.一种手部辅助康复机器人,其特征在于,包括:全指手套以及不同长度的肌肉软体,五个所述肌肉软体分别与所述全指手套的五个手指套对应配合连接,所述肌肉软体安装于手指套的掌背侧;所述肌肉软体包括柔性基体以及设置于柔性基体中的两伸缩腔,通过调节两所述伸缩腔中的气压强弱,从而驱动穿戴所述全指手套的手指进行双侧弯曲运动。
2.根据权利要求1所述的一种手部辅助康复机器人,其特征在于,两所述伸缩腔相对所述手指套的投影重合设置,两所述伸缩腔间隔设置且位于所述柔性基体的中心两侧。
3.根据权利要求2所述的一种手部辅助康复机器人,其特征在于,所述伸缩腔沿所述肌肉软体的长度方向设置,所述伸缩腔的截面为规则图形。
4.根据权利要求3所述的一种手部辅助康复机器人,其特征在于,远离所述手指套一侧的所述伸缩腔的截面面积大于另一所述所述伸缩腔的截面面积。
5.根据权利要求4述的一种手部辅助康复机器人,其特征在于,还包括供气组件,所述供气组件包括接头、输气管以及气压调节单元,所述接头的一端与所述伸缩腔固定连接,所述接头的另一端与所述输气管可拆卸连接,所述气压调节单元与所示输气管的另一端连通,所述能够控制输气管中的气压大小。
6.根据权利要求1所述的一种手部辅助康复机器人,其特征在于,所述柔性基体内设有纤维约束单元,所述纤维约束单元包括周向约束线,所述周向约束线环绕所述柔性基体设置且嵌入所述柔性基体中。
7.根据权利要求6所述的一种手部辅助康复机器人,其特征在于,所述纤维约束单元还包括轴向约束线,所述轴向约束线沿所述柔性基体的长度方向设置且嵌入所述柔性基体中。
8.根据权利要求7所述的一种手部辅助康复机器人,其特征在于,所述柔性基体的表面涂覆有保护层。
9.根据权利要求1-8任意一项所述的一种手部辅助康复机器人,其特征在于,所述肌肉软体与手指套之间设有固定模块,所述固定模块包括固定件,所述固定件设置于手指套相对手指关节处的两侧,所述肌肉软体与手指套被所述固定件多点绑定。
10.根据权利要求9所述的一种手部辅助康复机器人,其特征在于,所述手指套的端部设有压力传感器,所述压力传感器与所述手指套固定连接。
技术总结
本发明公开了一种柔性手部康复机器人,属于医疗康复器械技术领域;其包括:全指手套以及不同长度的肌肉软体,五个所述肌肉软体分别与所述全指手套的五个手指套对应配合连接,所述肌肉软体安装于手指套的掌背侧;所述肌肉软体包括柔性基体以及设置于柔性基体中的两伸缩腔,通过调节两所述伸缩腔中的气压强弱,从而驱动穿戴所述全指手套的手指进行双侧弯曲运动。本发明通过在肌肉软体设置两伸缩腔,可以通过调节两伸缩腔中的气压强弱,来控制伸缩腔的伸缩,从而驱动肌肉软体向两侧弯曲,为人手的抓握和伸展两个进程提供动力。
技术研发人员:孟伟,周稚雄,李梦南,艾青松,左洁,刘泉
受保护的技术使用者:武汉理工大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!