带有力反馈功能的主从式眼科手术机器人主操作器的制作方法
本公开涉及手术器械,尤其是涉及一种带有力反馈功能的主从式眼科手术机器人主操作器。
背景技术:
1、视网膜静脉阻塞会导致眼睛部分甚至完全失明。受此疾病的患者约有1640万人。视网膜静脉插管是一种治疗视网膜静脉阻塞的有效方法。手术中,外科医生将通过在眼中形成的小切口将针头插入阻塞的视网膜静脉,然后注射足够剂量的溶解药物。目标血管的厚度在30μm至400μm之间,所以这种手术对精度的要求十分高,需要借助机器人来辅助。眼科显微手术操作起来比传统的开放手术困难许多,因为手术器械通常比较细长,没有直观的力反馈,且手术空间极其有限。而且医生的生理性颤抖会导致操作精度的下降。从而增加意外发生的风险。机器人辅助微创手术则可以弥补这些缺点。主从式手术机器人能滤除医生的手部颤抖,放大力反馈,给医生提供直观的工作环境从而提高手术的成功率,使手术更安全,更有效。
2、目前,已有的主操作器多是通用型产品,工作空间、运动方式等与手术的要求存在差异,且体积较大,不利于工作人员的转移,不利于有推广使用。
技术实现思路
1、本公开提供了一种带有力反馈功能的主从式眼科手术机器人主操作器,以解决发明人认识到现有的主操作器体积较大,不利于工作人员的转移,不利于有推广使用技术问题。
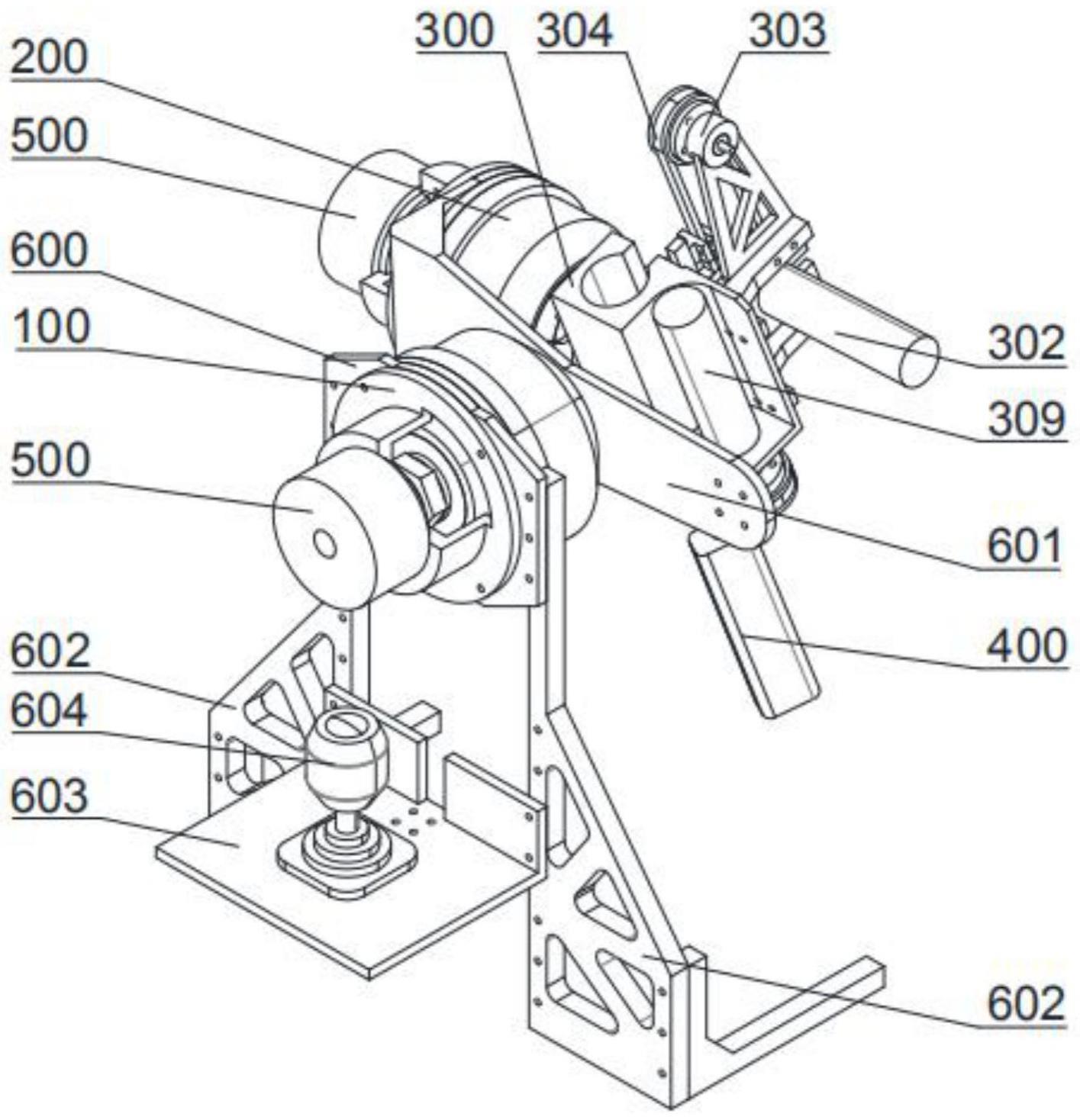
2、本公开提供了一种带有力反馈功能的主从式眼科手术机器人主操作器,包括:
3、第一操作结构,所述第一操作结构包括第一定子外壳、第一联动轴,所述第一联动轴设置于所述第一定子外壳内,所述第一定子外壳的外表面连接有安装盘,所述第一联动轴用于相对于所述安装盘绕第一轴线转动;
4、第二操作结构,所述第二操作结构包括第二定子外壳、第二联动轴和安装板,所述安装板设置于所述第二定子外壳的外表面,所述第二联动轴设置于所述第二定子外壳内,所述第一联动轴的一端与所述安装板的表面相连接,所述第二联动轴用于相对于所述安装板绕第二轴线转动;
5、末端操作结构,所述末端操作结构包括进给组件、直线导轨和转动组件,所述进给组件和所述转动组件均安装于所述直线导轨上,所述第二联动轴的一端与所述直线导轨的一侧相连接;
6、末端握把,所述末端握把与所述末端操作结构相连接,所述末端握把用于沿进给组件所限定的第一方向做直线运动,所述末端握把用于相对于所述直线导轨绕第三轴线转动,所述第三轴线与所述末端握把的轴线相平行。
7、在上述任一技术方案中,进一步地,所述第一定子外壳内设置有第一无框电机定子,所述第一无框电机定子内设置有第一无框电机转子,所述第一无框电机转子与所述第一联动轴的表面相连接,所述第一联动轴的表面设置有第一定位轴套,所述第一定子外壳内且位于所述第一联动轴的表面设置有第一轴承,所述第一联动的表面且位于所述第一定子外壳内设置有第一垫片和第一螺母,所述第一垫片和所述第一螺母相抵接。
8、在上述任一技术方案中,进一步地,所述第二定子外壳内设置有第二无框电机定子,所述第二无框电机定子内设置有第二无框电机转子,所述第二无框电机转子与所述第二联动轴的表面相连接,所述第二联动轴的表面设置有第二定位轴套,所述第二定子外壳内且位于所述第二联动轴的表面设置有第二轴承,所述第二联动的表面且位于所述第二定子外壳内设置有第二垫片和第二螺母,所述第二垫片和所述第二螺母相抵接。
9、在上述任一技术方案中,进一步地,还包括驱动装置,所述驱动装置的数量为两个,两个所述驱动装置分别设置于所述第一联动轴和所述第二联动轴的另一端。
10、在上述任一技术方案中,进一步地,所述进给组件包括安装架,所述安装架设置于所述直线导轨的表面,所述安装架上设置有第一输出装置,所述安装架上活动连接有第一转轮,所述第一转轮的数量为两个,且两个所述第一转轮处于同一轴线,两个所述第一转轮的表面均抵接有第一传动带,所述第一输出装置与其中一个所述第一转轮相连接,所述安装架上设置有限位结构,所述限位结构上连接有随动夹板,所述随动夹板可拆卸连接于所述第一转轮上,所述随动夹板上设置有连接板,所述连接板的另一端延伸至直线导轨的内腔设置有限位轴承,所述限位轴承上连接有滚轮花键轴,所述滚轮花键轴的一端延伸至直线导轨的外部与所述末端握把的一端相连接。
11、在上述任一技术方案中,进一步地,所述转动组件包括第二输出装置、第二转轮和第二传动带,所述第二转轮的数量为两个,两个所述第二转轮的表面与所述第二传动带的表面相抵接,所述第二输出装置与其中一个所述第二转轮相连接,所述直线导轨上且位于所述滚轮花键轴的表面活动连接有滚珠花键法兰,其中一个所述第二转轮与所述滚珠花键法兰相连接。
12、在上述任一技术方案中,进一步地,所述限位结构包括限位板和滑板,所述限位板安装于所述安装架上,所述限位板的内部开设有滑槽,所述滑板与所述滑槽滑动连接,所述滑板的表面与所述随动夹板的表面相连接。
13、在上述任一技术方案中,进一步地,还包括支撑板,所述支撑板的数量为两个,两个所述支撑板对称设置于所述安装盘两侧。
14、在上述任一技术方案中,进一步地,两个所述支撑板上可拆卸连接有放置板,所述放置板上设置有霍尔操作杆。
15、在上述任一技术方案中,进一步地,所述第一转轮和所述第二转轮可采用同步轮或齿轮结构。
16、本公开的有益效果主要在于:
17、1、第一操作结构、第二操作结构和末端操作结构之间,结构紧凑,缩小整体尺寸,便于工作人员的转移。
18、2、现有的主操作器的操作空间与从执行器相比为1:1。本公开的运动空间与从执行器相比为2:1,增大了运动范围,从而提高了分辨率,使医生的操作更为精确。
19、3、相较于现有的主操作器,传动少,因此精度高,对加工装配精度要求较低。
20、4、带有力反馈功能,能将手术过程中与眼组织的接触力反馈给用户。
21、应当理解,前述的一般描述和接下来的具体实施方式两者均是为了举例和说明的目的并且未必限制本公开。并入并构成说明书的一部分的附图示出本公开的主题。同时,说明书和附图用来解释本公开的原理。
技术特征:
1.一种带有力反馈功能的主从式眼科手术机器人主操作器,其特征在于,包括:
2.根据权利要求1所述的带有力反馈功能的主从式眼科手术机器人主操作器,其特征在于,所述第一定子外壳内设置有第一无框电机定子,所述第一无框电机定子内设置有第一无框电机转子,所述第一无框电机转子与所述第一联动轴的表面相连接,所述第一联动轴的表面设置有第一定位轴套,所述第一定子外壳内且位于所述第一联动轴的表面设置有第一轴承,所述第一联动的表面且位于所述第一定子外壳内设置有第一垫片和第一螺母,所述第一垫片和所述第一螺母相抵接。
3.根据权利要求2所述的带有力反馈功能的主从式眼科手术机器人主操作器,其特征在于,所述第二定子外壳内设置有第二无框电机定子,所述第二无框电机定子内设置有第二无框电机转子,所述第二无框电机转子与所述第二联动轴的表面相连接,所述第二联动轴的表面设置有第二定位轴套,所述第二定子外壳内且位于所述第二联动轴的表面设置有第二轴承,所述第二联动的表面且位于所述第二定子外壳内设置有第二垫片和第二螺母,所述第二垫片和所述第二螺母相抵接。
4.根据权利要求3所述的带有力反馈功能的主从式眼科手术机器人主操作器,其特征在于,还包括驱动装置,所述驱动装置的数量为两个,两个所述驱动装置分别设置于所述第一联动轴和所述第二联动轴的另一端。
5.根据权利要求4所述的带有力反馈功能的主从式眼科手术机器人主操作器,其特征在于,所述进给组件包括安装架,所述安装架设置于所述直线导轨的表面,所述安装架上设置有第一输出装置,所述安装架上活动连接有第一转轮,所述第一转轮的数量为两个,且两个所述第一转轮处于同一轴线,两个所述第一转轮的表面均抵接有第一传动带,所述第一输出装置与其中一个所述第一转轮相连接,所述安装架上设置有限位结构,所述限位结构上连接有随动夹板,所述随动夹板可拆卸连接于所述第一转轮上,所述随动夹板上设置有连接板,所述连接板的另一端延伸至直线导轨的内腔设置有限位轴承,所述限位轴承上连接有滚轮花键轴,所述滚轮花键轴的一端延伸至直线导轨的外部与所述末端握把的一端相连接。
6.根据权利要求5所述的带有力反馈功能的主从式眼科手术机器人主操作器,其特征在于,所述转动组件包括第二输出装置、第二转轮和第二传动带,所述第二转轮的数量为两个,两个所述第二转轮的表面与所述第二传动带的表面相抵接,所述第二输出装置与其中一个所述第二转轮相连接,所述直线导轨上且位于所述滚轮花键轴的表面活动连接有滚珠花键法兰,其中一个所述第二转轮与所述滚珠花键法兰相连接。
7.根据权利要求6所述的带有力反馈功能的主从式眼科手术机器人主操作器,其特征在于,所述限位结构包括限位板和滑板,所述限位板安装于所述安装架上,所述限位板的内部开设有滑槽,所述滑板与所述滑槽滑动连接,所述滑板的表面与所述随动夹板的表面相连接。
8.根据权利要求7所述的带有力反馈功能的主从式眼科手术机器人主操作器,其特征在于,还包括支撑板,所述支撑板的数量为两个,两个所述支撑板对称设置于所述安装盘两侧。
9.根据权利要求8所述的带有力反馈功能的主从式眼科手术机器人主操作器,其特征在于,两个所述支撑板上可拆卸连接有放置板,所述放置板上设置有霍尔操作杆。
10.根据权利要求9所述的带有力反馈功能的主从式眼科手术机器人主操作器,其特征在于,所述第一转轮和所述第二转轮可采用同步轮或齿轮结构。
技术总结
本公开提供了一种带有力反馈功能的主从式眼科手术机器人主操作器,涉及手术器械技术领域,包括第一操作结构,第一操作结构包括第一定子外壳、第一联动轴第一联动轴用于相对于安装盘绕第一轴线转动;第二操作结构,第二操作结构包括第二定子外壳、第二联动轴和安装板,第二联动轴用于相对于安装板绕第二轴线转动;末端握把,末端握把用于沿进给组件所限定的第一方向做直线运动,末端握把用于相对于直线导轨绕第三轴线转动,第一操作结构、第二操作结构和末端操作结构之间,结构紧凑,缩小整体尺寸,便于工作人员的转移。
技术研发人员:宗俊杰,郭英爱,张春,马维敏,杨斯钦
受保护的技术使用者:北京衔微医疗科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!