具有振动头的机器人的控制方法、控制装置及理疗机器人与流程
本发明涉及机器人,具体而言,涉及一种具有振动头的机器人的控制方法、控制装置及理疗机器人。
背景技术:
1、理疗机器人是一种对人体进行理疗的机器人,其在工作过程中会控制理疗工具贴压在人体表面对人体进行理疗。
2、目前,具有振动按压功能的理疗机器人在控制理疗工具振动,以刺激人体穴位时,存在频率较高的扰动,导致理疗工具作用在人体上的按压力均匀性和精确度均较低,进而,导致理疗效果降低,并导致危险性升高。
技术实现思路
1、本发明的目的在于提供一种具有振动头的机器人的控制方法、控制装置及理疗机器人,以缓解现有技术中具有振动按压功能的理疗机器人存在的理疗效果低、危险性高的技术问题。
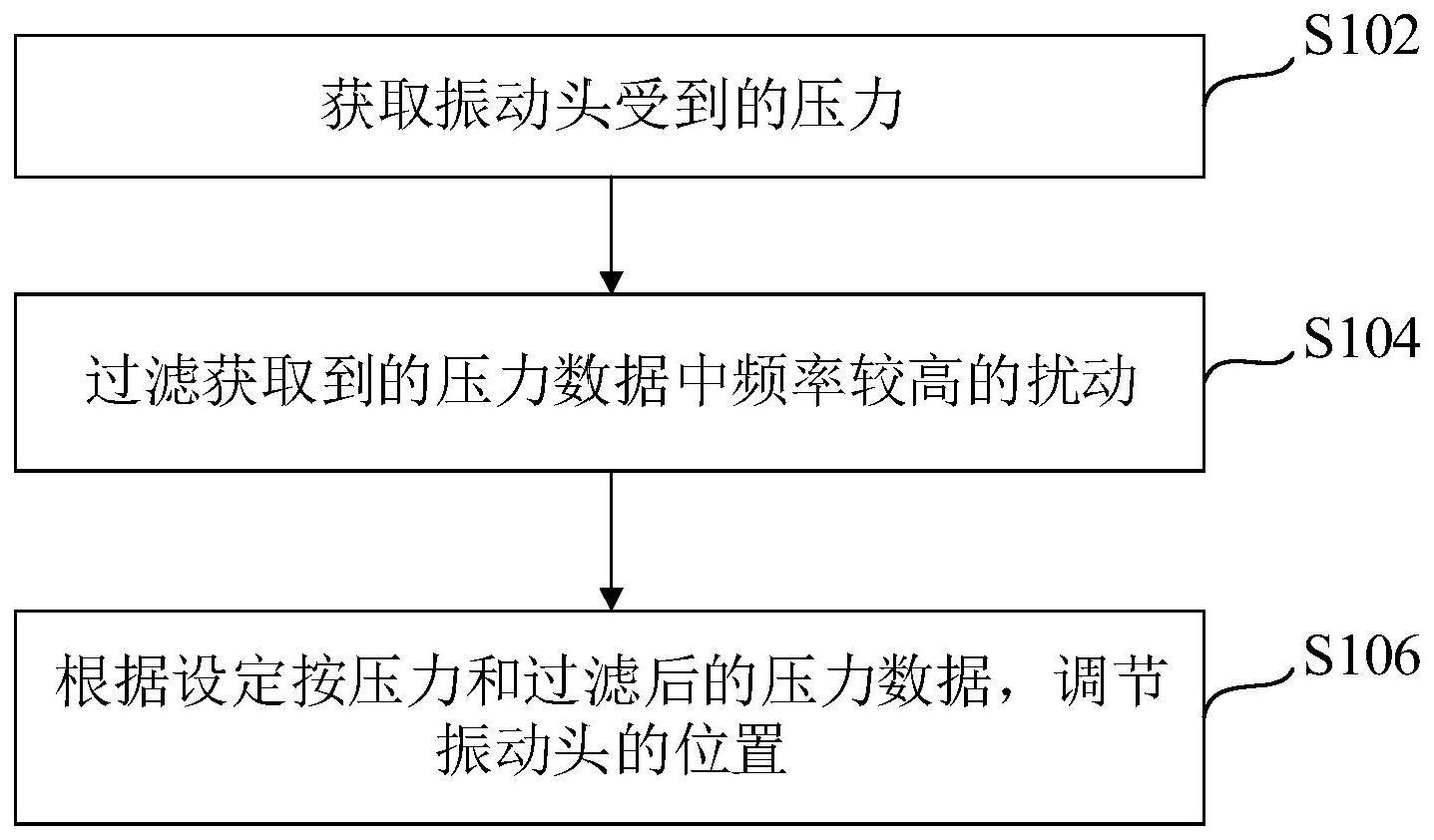
2、本发明提供的具有振动头的机器人的控制方法,包括:
3、获取所述振动头受到的压力;
4、过滤获取到的压力数据中频率较高的扰动;
5、根据设定按压力和过滤后的压力数据,调节所述振动头的位置。
6、优选地,作为一种可实施方式,所述根据设定按压力和过滤后的压力数据,调节所述振动头的位置,包括:
7、根据设定按压力和过滤后的压力数据,计算得到所述振动头的偏差位移;
8、根据所述振动头的偏差位移,调节所述振动头的位置。
9、优选地,作为一种可实施方式,所述根据所述振动头的偏差位移,调节所述振动头的位置,包括:
10、根据所述振动头的偏差位移,利用比例、积分、微分计算得到控制量;
11、根据所述控制量控制机械臂动作,以调节所述振动头的位置。
12、优选地,作为一种可实施方式,所述根据设定按压力和过滤后的压力数据,计算得到所述振动头的偏差位移,包括:
13、计算设定按压力与过滤后的压力数据的差值;
14、根据所述差值和牛顿第二定律,计算得到所述振动头的偏差加速度;
15、对所述振动头的偏差加速度进行积分,得到所述振动头的偏差速度;
16、对所述振动头的偏差速度进行积分,得到所述振动头的偏差位移。
17、本发明提供的具有振动头的机器人的控制装置,包括:
18、压力获取模块,用于获取所述振动头受到的压力;
19、低通滤波模块,用于过滤所述压力获取模块获取到的压力数据中频率较高的扰动;
20、位置调节模块,用于根据经所述低通滤波器过滤后的压力数据和设定按压力,调节所述振动头的位置。
21、优选地,作为一种可实施方式,所述位置调节模块包括:
22、位移计算单元,用于根据过滤后的压力数据,计算得到所述振动头的偏差位移;
23、位置调节单元,用于根据所述振动头的偏差位移,调节所述振动头的位置。
24、优选地,作为一种可实施方式,所述位置调节单元包括比例-积分-微分控制器,所述比例-积分-微分控制器用于根据所述振动头的偏差位移,利用比例、积分、微分计算得到控制量,并根据所述控制量控制机械臂动作,以调节所述振动头的位置。
25、优选地,作为一种可实施方式,所述位移计算单元包括:
26、误差计算器,用于计算设定按压力与所述过滤后的压力数据的差值;
27、加速度计算器,用于根据所述差值与牛顿第二定律,计算得到所述振动头的偏差加速度;
28、第一积分器,用于对所述振动头的偏差加速度进行积分,得到所述振动头的偏差速度;
29、第二积分器,用于对所述振动头的偏差速度进行积分,得到所述振动头的偏差位移。
30、优选地,作为一种可实施方式,所述压力获取模块包括力传感器;
31、和/或,所述低通滤波模块包括低通滤波器。
32、本发明提供的理疗机器人,包括理疗工具和上述具有振动头的机器人的控制装置,所述理疗工具包括所述振动头。
33、与现有技术相比,本发明的有益效果在于:
34、振动头在工作过程中产生的振动,会导致压力数据中存在频率较高的扰动,导致数据震荡较严重,过滤掉压力数据中频率较高的扰动后,数据震荡能够明显减低。因过滤后的压力数据相对于未过滤的压力数据而言,震荡明显减低,故将设定按压力与过滤后的压力数据进行比较,并进行计算分析,可获取更加精准的调节参数,在该调节参数的控制下,可将振动头调节至更加精准的位置,从而,振动头可实时贴于人体,并且末端可根据身体的起伏进行适应性移动,如此,振动头作用于人体的按压力均匀性更佳且更精确,可提高理疗机器人的理疗效果,并可降低危险性。
技术特征:
1.一种具有振动头的机器人的控制方法,其特征在于,包括:
2.根据权利要求1所述的具有振动头的机器人的控制方法,其特征在于,所述根据设定按压力和过滤后的压力数据,调节所述振动头的位置,包括:
3.根据权利要求2所述的具有振动头的机器人的控制方法,其特征在于,所述根据所述振动头的偏差位移,调节所述振动头的位置,包括:
4.根据权利要求2或3所述的具有振动头的机器人的控制方法,其特征在于,所述根据设定按压力和过滤后的压力数据,计算得到所述振动头的偏差位移,包括:
5.一种具有振动头的机器人的控制装置,其特征在于,包括:
6.根据权利要求5所述的具有振动头的机器人的控制装置,其特征在于,所述位置调节模块包括:
7.根据权利要求6所述的具有振动头的机器人的控制装置,其特征在于,所述位置调节单元包括比例-积分-微分控制器,所述比例-积分-微分控制器用于根据所述振动头的偏差位移,利用比例、积分、微分计算得到控制量,并根据所述控制量控制机械臂动作,以调节所述振动头的位置。
8.根据权利要求6所述的具有振动头的机器人的控制装置,其特征在于,所述位移计算单元包括:
9.根据权利要求5-8任一项所述的具有振动头的机器人的控制装置,其特征在于,所述压力获取模块包括力传感器;
10.一种理疗机器人,其特征在于,包括理疗工具和权利要求5-9任一项所述的具有振动头的机器人的控制装置,所述理疗工具包括所述振动头。
技术总结
本发明涉及机器人技术领域,具体而言,涉及一种具有振动头的机器人的控制方法、控制装置及理疗机器人。具有振动头的机器人的控制方法包括:获取振动头受到的压力;过滤获取到的压力数据中频率较高的扰动;根据设定按压力和过滤后的压力数据,调节振动头的位置。本发明提供的具有振动头的机器人的控制方法、控制装置及理疗机器人,压力数据震荡明显减低,可获取更加精准的调节参数,在该调节参数的控制下,可将振动头调节至更加精准的位置,从而,振动头可实时贴于人体,并且末端可根据身体的起伏进行适应性移动,如此,振动头作用于人体的按压力均匀性更佳且更精确,可提高理疗机器人的理疗效果,并可降低危险性。
技术研发人员:陈兆芃,黎田,别东洋,白宇珅
受保护的技术使用者:北京思灵机器人科技有限责任公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!