进给机构和手术机器人的制作方法
本公开涉及手术机器人,尤其涉及一种进给机构和手术机器人。
背景技术:
1、上尿路结石是泌尿系多发疾病之一,约占泌尿外科手术的40%。经皮肾镜碎石术以其微创、结石清除率高为特点,一直被认为是治疗大结石、多发结石或下盏结石的首选。由于肾脏解剖结构和结石引起肾结构病变的复杂性,经皮肾镜碎石术难以准确穿刺定位,由此引发的并发症就是出血和感染。
2、手术机器人配合钬激光通过人体自然通道进行操作的无创技术,从而避免了经皮肾镜碎石术导致肾脏出血和感染的风险,安全性更高。碎石手术中,主要为医生手动操作介入导管器械,通过手持外导管,手持介入导管器械手柄完成整个手术过程。目前的手术机器人,在医生操作介入导管器械时,如果介入导管器械遇到组织阻挡而无法向前时,医生缺乏判断的基础。在这种情况下,如果医生用力强行操作介入导管器械,很容易导致患者组织受损。
技术实现思路
1、本公开提供一种手术机器人,以解决相关技术中的至少部分问题。
2、根据本公开的第一方面提出一种进给机构,用于驱动输尿管软镜移动,所述进给机构包括:
3、固定座;
4、第一滑动件,安装于所述固定座;
5、第二滑动件,安装于所述固定座,并且,用于安装所述输尿管软镜;
6、驱动组件,安装于所述固定座,并且,与所述第一滑动件连接,所述驱动组件用于驱动所述第一滑动件移动;
7、进给传感器,分别与所述第一滑动件以及所述第二滑动件固定连接,所述第一滑动件通过所述进给传感器带动所述第二滑动件移动,并且,所述进给传感器用于检测所述第二滑动件在移动过程中所受阻力。
8、可选的,所述进给机构还包括第一连接件,所述第一连接件凹陷形成第一连接凹槽,所述第一连接凹槽用于容纳至少部分所述第一滑动件。
9、可选的,所述进给机构还包括第二连接件,所述第二连接件凹陷形成第二连接凹槽,所述第二连接凹槽用于容纳至少部分所述第二滑动件。
10、可选的,所述进给机构还包括安装于所述固定座的进给导向件和进给传动件;
11、所述进给传动件套设于所述进给导向件,并且,所述进给传动件与所述第一滑动件固定连接;
12、所述驱动组件与所述进给导向件连接以用于驱动所述进给导向件转动,以使得所述进给传动件沿所述进给导向件移动。
13、可选的,所述进给机构还包括控制器,所述控制器与所述进给传感器以及所述驱动组件电连接;所述进给传感器用于监测第一滑块与第二滑块之间的阻力变化并产生阻力信号,所述控制器用于接收所述阻力信号,并将所述阻力信号转换为可读信号,且将所述可读信号传递至操作界面;
14、所述固定座包括第一固定件、第二固定件以及连接设置于所述第一固定件和所述第二固定件之间的固定连接件,所述第一固定件和所述第二固定件在竖直方向上的高度不同;
15、所述第一滑动件、所述第二滑动件、所述驱动组件以及所述进给传感器安装于所述第一固定件;
16、所述控制器安装于所述第二固定件。
17、可选的,所述进给机构还包括线缆和拖链,所述线缆电连接于所述控制器和所述进给传感器,所述拖链用于容纳至少部分所述线缆;
18、所述拖链的一端固定安装于所述第二固定件,另一端固定安装于所述第一滑动件。
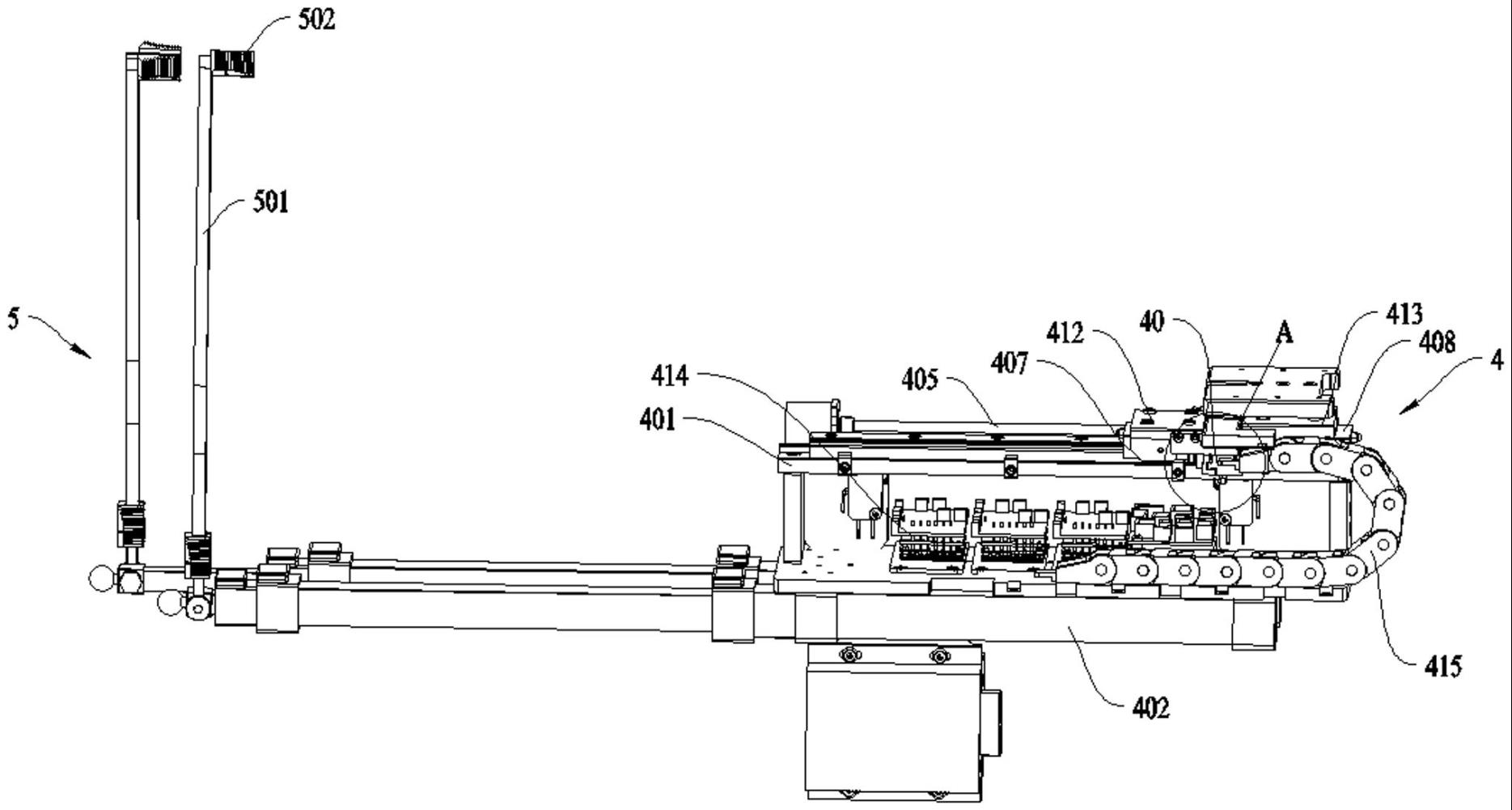
19、根据本公开的第二方面提出一种手术机器人,其用于操作输尿管软镜,所述手术机器人包括导引鞘,所述导引鞘包括用于容纳至少部分所述软管的导引通道,所述手术机器人包括上述进给机构以及与所述固定座相连的支撑机构;
20、所述进给机构用于安装所述主体部,所述支撑机构用于支撑所述导引鞘。
21、可选的,所述支撑机构包括支撑杆和支撑件,所述支撑杆的一端与所述固定座连接,所述支撑杆的另一端与所述支撑件连接;
22、所述支撑件包括支撑槽,所述支撑槽用于容纳至少部分导引鞘。
23、可选的,所述支撑槽包括开口与容纳腔,所述容纳腔与所述开口连通;
24、所述容纳腔的靠近所述开口一侧的宽度小于所述容纳腔的最大宽度。
25、可选的,所述支撑件包括第一壁面和两个第二壁面,所述第一壁面呈弧形,并且,所述第一壁面围成所述容纳腔;所述两个第二壁面分别连接于所述第一壁面的两端,所述开口至少部分位于所述两个第二壁面之间;所述两个第二壁面之间的距离小于所述容纳腔的直径。
26、可选的,所述支撑槽还包括引导腔,所述引导腔连通所述容纳腔,并作为所述开口的部分结构;
27、所述支撑件包括两个相对设置的第三壁面,两个所述第三壁面分别连接于所述容纳腔的侧壁面;沿自所述引导腔指向所述容纳腔的方向,所述两个第三壁面之间的距离逐渐减小。
28、可选的,所述支撑机构还包括第一锁紧件,所述第一锁紧件套设于所述支撑件;
29、所述第一锁紧件上开设有贯穿的锁紧槽,所述锁紧槽用于容纳所述支撑件;至少部分所述锁紧槽的宽度小于所述支撑件的宽度,并且,沿第一方向,所述锁紧槽的宽度逐渐减小;
30、当所述第一锁紧件沿所述第一方向滑动时,所述支撑槽的宽度减小,以使得所述支撑件锁紧所述导引鞘;当所述第一锁紧件沿第二方向滑动时,所述支撑槽的宽度增大;
31、所述第一方向和所述第二方向反向设置,并且,所述第一方向和所述第二方向均平行于所述支撑槽的延伸方向。
32、可选的,所述第一锁紧件包括相对设置的两个侧壁,所述两个侧壁位于所述支撑件的两侧;沿所述第一方向,所述两个侧壁朝远离所述支撑件的方向弯曲延伸。
33、可选的,所述侧壁包括至少一个防滑凸起。
34、可选的,所述支撑杆与所述固定座活动连接,所述支撑杆在所述第一位置和所述第二位置之间移动;
35、当所述支撑杆位于所述第一位置时,所述支撑杆与所述支撑件配合以支撑所述导引鞘;
36、当所述支撑杆位于所述第二位置时,所述支撑杆收纳于所述固定座周围。
37、本公开的实施例提供的技术方案可以包括以下有益效果:
38、一方面,进给传感器可以起到传动作用,第一滑动件通过进给传感器带动第二滑动件沿y方向移动。另一方面,进给传感器可用于检测第二滑动件在移动中受到的阻力。当第二滑动件在移动中受到的阻力发生变化时,进给传感器产生阻力信号,并传递至用户操作界面,用户根据该阻力信号来调整输尿管软镜的进给。
39、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
技术特征:
1.一种进给机构,用于驱动输尿管软镜移动,其特征在于,所述进给机构包括:
2.根据权利要求1所述的进给机构,其特征在于,所述进给机构还包括第一连接件,所述第一连接件凹陷形成第一连接凹槽,所述第一连接凹槽用于容纳至少部分所述第一滑动件。
3.根据权利要求1所述的进给机构,其特征在于,所述进给机构还包括第二连接件,所述第二连接件凹陷形成第二连接凹槽,所述第二连接凹槽用于容纳至少部分所述第二滑动件。
4.根据权利要求1所述的进给机构,其特征在于,所述进给机构还包括安装于所述固定座的进给导向件和进给传动件;
5.根据权利要求1所述的进给机构,其特征在于,所述进给机构还包括控制器,所述控制器与所述进给传感器以及所述驱动组件电连接;所述进给传感器用于监测第一滑块与第二滑块之间的阻力变化并产生阻力信号,所述控制器用于接收所述阻力信号,并将所述阻力信号转换为可读信号,且将所述可读信号传递至操作界面;
6.根据权利要求5所述的进给机构,其特征在于,所述进给机构还包括线缆和拖链,所述线缆电连接于所述控制器和所述进给传感器,所述拖链用于容纳至少部分所述线缆;
7.一种手术机器人,其用于操作输尿管软镜,所述输尿管软镜包括主体部和软管,所述手术机器人包括导引鞘,所述导引鞘包括用于容纳至少部分所述软管的导引通道,其特征在于,所述手术机器人包括如权利要求1-6中任意一项所述的进给机构以及与所述固定座相连的支撑机构;
8.根据权利要求7所述的手术机器人,其特征在于,所述支撑机构包括支撑杆和支撑件,所述支撑杆的一端与所述固定座连接,所述支撑杆的另一端与所述支撑件连接;
9.根据权利要求8所述的手术机器人,其特征在于,所述支撑槽包括开口与容纳腔,所述容纳腔与所述开口连通;
10.根据权利要求9所述的手术机器人,其特征在于,所述支撑件包括第一壁面和两个第二壁面,所述第一壁面呈弧形,并且,所述第一壁面围成所述容纳腔;所述两个第二壁面分别连接于所述第一壁面的两端,所述开口至少部分位于所述两个第二壁面之间;所述两个第二壁面之间的距离小于所述容纳腔的直径。
11.根据权利要求9所述的手术机器人,其特征在于,所述支撑槽还包括引导腔,所述引导腔连通所述容纳腔,并作为所述开口的部分结构;
12.根据权利要求8所述的手术机器人,其特征在于,所述支撑机构还包括第一锁紧件,所述第一锁紧件套设于所述支撑件;
13.根据权利要求12所述的手术机器人,其特征在于,所述第一锁紧件包括相对设置的两个侧壁,所述两个侧壁位于所述支撑件的两侧;沿所述第一方向,所述两个侧壁朝远离所述支撑件的方向弯曲延伸。
14.根据权利要求13所述的手术机器人,其特征在于,所述侧壁包括至少一个防滑凸起。
15.根据权利要求8所述的手术机器人,其特征在于,所述支撑杆与所述固定座活动连接,所述支撑杆在所述第一位置和所述第二位置之间移动;
技术总结
本公开是关于一种进给机构和手术机器人。进给机构用于驱动输尿管软镜移动。进给机构包括固定座、第一滑动件、第二滑动件、驱动组件以及进给传感器。第一滑动件安装于固定座。第二滑动件安装于固定座,并且用于安装输尿管软镜。驱动组件安装于固定座,并且与第一滑动件连接。驱动组件用于驱动第一滑动件移动。进给传感器分别与第一滑动件以及第二滑动件固定连接,第一滑动件通过进给传感器带动第二滑动件移动。进给传感器用于检测第二滑动件在移动过程中所受阻力。通过这种设计,当第二滑动件在移动中受到的阻力发生变化时,进给传感器产生阻力信号,并传递至用户操作界面,用户根据该阻力信号来调整输尿管软镜的进给。
技术研发人员:韩建达,宋伟,朱世强,陈令凯,刘晓磊,梁大伟
受保护的技术使用者:之江实验室
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!