考虑不确定性的数据驱动的动力学序列线性规划方法
本发明涉及数据驱动计算动力学,尤其是涉及一种考虑不确定性的数据驱动的动力学序列线性规划方法。
背景技术:
1、随着现代科学技术的发展,力学已经成为不同工程领域强有力的理论支撑,特别是经典的数值计算力学方法已经成为分析结构应力、位移响应强有力的工具,为实际工程提供理论指导。
2、经典基于本构关系的计算动力学方法(constitutive low-based computing indynamics,简称clcd)实际上是建立在基于显式本构模型的框架上的。该框架根据从特定实验中获得的有限数据点(通常是在简单的拉/压/纯剪切加载状态下)建立相空间中状态变量之间的显式本构函数,然后利用该显式本构函数来驱动数值求解。但是显式本构关系的获取需要长期经验的积累和极高的人力物力成本,因此现有的本构关系常常以人名命名,例如hook定律、mooney rivlin模型等;而且目前不存在能够表达所有材料的本构关系的显式函数。随着科技的发展,新型材料层出不穷,现有的显式本构已难以满足当前的需求,然而为每种新材料都构建显式本构关系已难以满足当前产品研发周期的需求。同时随着实验方法的不断进步,获取的实验数据出现了爆炸式增长。而且继实验、理论、计算之后,数据已成为人类认知世界的第四科学范式。因此,直接利用材料的实验数据建立一套全新的框架去预测结构响应引起了很多力学工作者的关注。这种直接利用离散的实验数据,绕开建立解析形式的显式本构模型的全新范式被称为“数据驱动计算力学”,特别是将这一方法引入动力学领域,已经发展成为经典的范式“数据驱动计算动力学”(data-drivencomputingindynamics简称ddcd)。
3、该类方法不对本构数据做任何的拟合,且脱离经典计算力学框架,通过求解本构数据中的点与满足守恒定律的点的距离极值寻求问题的解。尽管如今的框架下能根据数据集求解出满足数据本构以及协调方程和平衡方程的响应曲线,但由于实验数据的不确定性,材料性质的波动,此单一曲线缺乏可信度,不能很好的满足工程需求。
4、实际上,当采用数据驱动框架时,由于实验中不可避免的不确定性因素,难以确保实验数据点真的表征了材料的本构行为,进而导致在此框架下求得的单一响应曲线缺乏实际的意义。
技术实现思路
1、本发明的目的是解决上述现有技术存在的技术问题。
2、为实现上述目的,本发明提供了一种考虑不确定性的数据驱动的动力学序列线性规划方法,具体步骤如下:
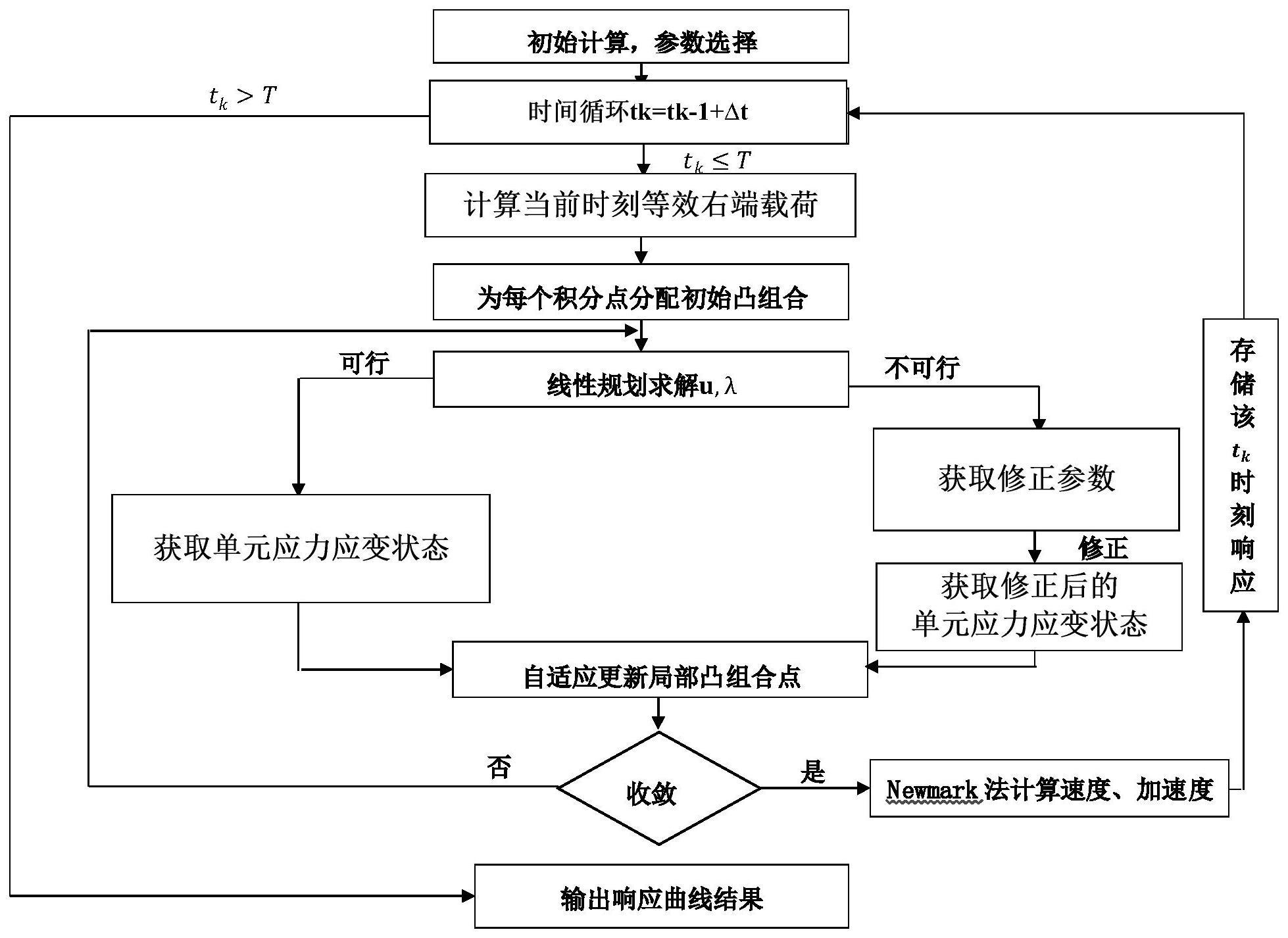
3、步骤s1:将动力学的二阶微分方程在时间域离散,形成多个时刻点,输入初始参数,并进行初始计算获得质量矩阵m和协调矩阵b,设置时间步δt、newmark算法参数以及初始条件;
4、步骤s2:计算当前时刻等效右端载荷,为每个单元分配初始凸组合数据并得到线性规划求解;
5、步骤s3:判定线性规划求解是否可行,当线性规划求解可行时,自适应更新局部凸组合点,当线性规划求解不可行时,修正后自适应更新局部凸组合点,直到更新后局部凸组合点满足收敛条件;
6、步骤s4:通过newmark算法计算收敛后的速度和加速度,并将速度和加速度存储为当前时刻响应,返回步骤s2中进行下一时刻响应的计算;
7、步骤s5:直到计算完时间域所有时刻点的响应,输出相应曲线结果。
8、优选的,在步骤s1中,newmark算法参数包括常数参数α和常数参数β。
9、优选的,在步骤s2中,当前时刻tk等效右端载荷计算公式如下:
10、
11、其中,为当前时刻等效右端载荷,pk为当前时刻外载荷向量,为当前时刻newmark预测值;
12、为每个单元分配初始凸组合数据具体操作如下:
13、从数据集中选择初始局部凸组合的应力应变数据:
14、
15、其中,enc为构成第e个单元的第nc个数据点的标识,其中e=1,…,m,m为划分单元的个数,表示从数据集d中选出构成局部凸组合的数据点;
16、式中初始数据编号如下:
17、
18、其中l(1)是(nd-1)/nc的整数部分;
19、根据每个单元分配初始凸组合数据计算得到线性规划求解和
20、优选的,在步骤s3具体为:设l为更新次数,
21、当线性规划求解可行时,采用如下公式获取单元应力应变状态
22、
23、其中,表示为局部凸组合的系数,
24、当线性规划求解不可行时,通过修正公式获取单元应力应变状态计算公式如下:
25、
26、其中,为修正系数和过渡应力应变状态参数;
27、通过修正公式获取修正参数如下:
28、
29、
30、
31、其中,we表示为单元体积,be表示为单元协调矩阵,为修正系数;
32、通过上述得到的单元应力应变状态得到更新后的局部凸组合的数据点
33、更新公式如下:
34、
35、其中,t为nc/2的整数部分,l(l+1)=l(l)+1,l(l)为大于等于1的整数,为距离当前状态最近的数据点的编号;
36、收敛判断公式如下:
37、
38、其中δ为收敛设定参数。
39、因此,本发明采用上述一种考虑不确定性的数据驱动的动力学序列线性规划方法,具有以下有益效果:
40、(1)局部凸组合描述本构关系的方法明确考虑了数据集中不可避免的不确定性(可能是由于测量误差、信息不足、建模不准确等原因造成的);通过更改目标函数来求解结构响应的解集,可以衡量数据集不确定性对响应的影响,比经典ddcd方法的单一响应曲线更具有可信度,更有利于工程师的判断。
41、(2)在数据点组成的凸包内求解结构响应,由于凸包的封闭性,使得求得的响应并不会远离数据点,从而使得该方法对于小样本数据集也具有有效性,降低了经典ddcd方法中对实验数据点数目的要求。
42、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
技术特征:
1.一种考虑不确定性的数据驱动的动力学序列线性规划方法,其特征在于,具体步骤如下:
2.根据权利要求1所述的一种考虑不确定性的数据驱动的动力学序列线性规划方法,其特征在于:在步骤s1中,newmark算法参数包括常数参数α和常数参数β。
3.根据权利要求2所述的一种考虑不确定性的数据驱动的动力学序列线性规划方法,其特征在于:在步骤s2中,当前时刻tk等效右端载荷计算公式如下:
4.根据权利要求3所述的一种考虑不确定性的数据驱动的动力学序列线性规划方法,其特征在于,在步骤s3具体为:设l为更新次数,
技术总结
本发明公开了一种考虑不确定性的数据驱动的动力学序列线性规划方法,具体步骤如下:输入初始参数并进行初始计算,计算当前时刻等效右端载荷,分配初始凸组合数据并得到线性规划求解,当线性规划求解可行时,自适应更新局部凸组合点,当线性规划求解不可行时,修正后自适应更新局部凸组合点,直到更新后局部凸组合点收敛;通过Newmark算法计算收敛后的速度和加速度,并将速度和加速度存储为当前时刻响应,进行下一时刻响应的计算;直到计算完时间域所有时刻点的响应,输出相应曲线结果。采用上述一种考虑不确定性的数据驱动的动力学序列线性规划方法,明确考虑了数据集中不可避免的不确定性,得到响应曲线更具有可信度,更有利于工程师的判断。
技术研发人员:郭旭,杜宗亮,孙培勇,黄孟成,刘畅,张维声
受保护的技术使用者:大连理工大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!