医生控制台的制作方法
本公开涉及医疗器械,尤其涉及一种医生控制台。
背景技术:
1、当前的医生控制台,医生可通过手或手脚并用对其进行操作,当涉及到用脚进行操作时,一般需要在控制台底座的脚踏板基座上设置脚踏开关,但是当前的脚踏开关一般设置于控制台底座上脚踏板基座的固定位置,不能适应不同身高的医生对其进行操作。
2、并且,一般所设计的脚踏开关,其所放置的脚踏板基座高度固定,不能升降,为了保证控制台的移动通过性,一般控制台底座和脚踏板基座离地有一定的高度,而对于坐在座椅上,以地面为基准,根据自身身高调节座椅高度的操作医生,当把脚放置于脚踏开关或脚踏板基座上时,由于脚踏板基座存在离地高度,需要抬高脚来配合,此操作极易引起操作医生用脚操作脚踏开关时或将脚放置于脚踏板基座时产生疲劳等不适。
3、因此,如何能够满足不同身高医生对医生控制台的操作,在能保证医生控制台的移动通过性能基础上,消除控制台底座上脚踏板基座离地高度需要抬高脚来配合引起的操作不适,提升脚部区域操作舒适性,提高医生控制台的适用性是本领域技术人员亟须解决的技术问题。
技术实现思路
1、针对上述技术问题,本公开提供一种医生控制台,用于至少部分解决现有技术问题。
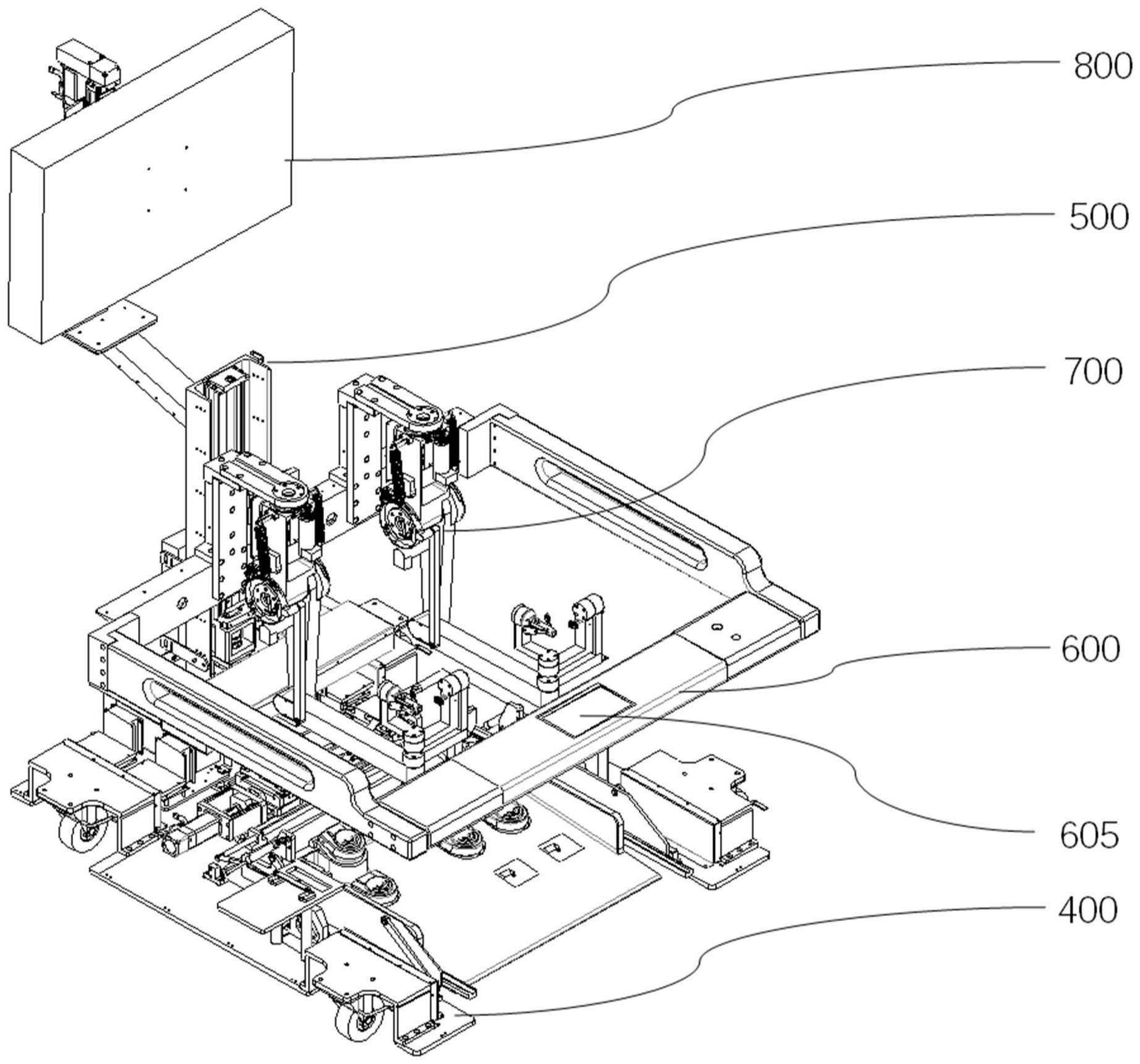
2、基于此,本公开实施例一种医生控制台,包括:控制台底座,包括底板和脚踏板基座,脚踏板基座滑动连接至底板,相对于底板沿水平方向滑动;摇杆机构,设置于脚踏板基座的两侧;升降机构,设置于脚踏板基座的两侧;升降机构被配置为在竖直作用力的驱动下,与摇杆机构配合以调节脚踏板基座的高度;立柱,一端固定在控制台底座上;主手,滑动连接在立柱上;显示器,滑动连接在立柱上;肘托扶手,滑动连接在立柱上;其中,肘托扶手上设有触摸屏,通过触摸屏控制主手、显示器和肘托扶手的电动升降。
3、根据本公开的实施例,摇杆机构包括:第二摇杆、第一摇杆和第一摇杆安装座;第二摇杆、第一摇杆和第一摇杆安装座之间通过销孔配合。
4、根据本公开的实施例,升降机构包括:脚踩板,用于施加作用力;直线轴承,贯穿脚踩板;导向轴,穿过直线轴承,一端固定在底板上;脚踩板复位弹簧,套设在导向轴上;升降施力用滚轮,用于将脚踩板施加的作用力传导至第二摇杆;升降施力用滚轮安装座,用于安装升降施力用滚轮;升降摇杆安装座,安装在脚踩板靠近底板的一侧;升降摇杆,一端安装在升降摇杆安装座上;升降滑道件,用于安装升降摇杆的另一端,升降摇杆的另一端在升降滑道件中滑动;拉伸弹簧用支柱,设置于升降摇杆上;导向拉伸弹簧,一端连接升降摇杆安装座,另一端连接拉伸弹簧用支柱;气弹簧安装座,安装在底板上;气弹簧,一端安装在气弹簧安装座上,另一端连接第二摇杆,用于提供第二摇杆竖直向上的回弹力。
5、根据本公开的实施例,第二摇杆还设有轨道,脚踏板基座上还设有摇杆轨道移动用滚轮和地面移动用滚轮;在升降摇杆锁定在升降滑道件的上部位置时,摇杆轨道移动用滚轮落在轨道中,在驱动力作用下,脚踏板基座通过摇杆轨道移动用滚轮在水平方向上移动;在升降摇杆锁定在升降滑道件的下部位置时,摇杆轨道移动用滚轮脱离轨道中,地面移动用滚轮接触地面,在驱动力作用下,脚踏板基座通过摇杆轨道移动用滚轮在水平方向上移动。
6、根据本公开的实施例,医生控制台还包括扭力杆机构,扭力杆机构包括第一扭力杆、两根第二扭力杆、两个扭力杆用滚轮和第一扭力杆安装座;两个扭力杆用滚轮分别安装在两侧的第二摇杆的轨道中,两根第二扭力杆分别与两个扭力杆用滚轮连接,第一扭力杆安装在第一扭力杆安装座且两端分别与两根第二扭力杆固定;在通过其中一侧的脚踩板施加作用力时,将传导至该侧的第二摇杆的作用力传导至该侧的扭力杆用滚轮,再经过第一扭力杆传导至另一侧的第二摇杆,再传导至另一侧的第二摇杆。
7、根据本公开的实施例,医生控制台还包括驱动机构,驱动机构包括驱动电机和传动机构;驱动电机连接传动机构,传动机构连接至脚踏板基座,驱动电机通过旋转提供作用力,通过传动机构将作用力传导至脚踏板基座,以控制脚踏板基座在水平方向运动。
8、根据本公开的实施例,传动机构包括联轴器、滚珠丝杆副、丝杆滑块、运动换向组件和导轨组件;联轴器用于将滚珠丝杆副与驱动电机的转动轴连接,丝杆滑块固定在滚珠丝杆副的两端,导轨组件安装在脚踏板基座上,运动换向组件一端转动连接丝杆滑块,另一端滑动连接导轨组件;其中,在驱动电机的转动作用下,滚珠丝杆副两端向中间靠拢或向两侧远离,带动丝杆滑块运动,丝杆滑块运动的作用力通过运动换向组件换向后控制传导导轨组件,以带动脚踏板基座移动。
9、根据本公开的实施例,滚珠丝杆副包括丝杆、两个螺母、第一直线导轨和丝杆座本体;丝杆的两端分别与两个螺母螺纹配合,两个螺母滑动连接第一直线导轨,第一直线导轨固定在丝杆座本体上;两个丝杆滑块分别安装在两个螺母上,其中,在驱动电机的作用下,与丝杆的两端分别螺纹配合的两个螺母相互靠近或远离,带动丝杆滑块运动。
10、根据本公开的实施例,运动换向组件包括交叉杆、第一铰链件、第二铰链件和铰链件安装座;铰链件安装座滑动连接导轨组件,第二铰链件的一端连接铰链件安装座,另一端连接第一铰链件的一端,第一铰链件的另一端连接交叉杆的一端,交叉杆的另一端连接丝杆滑块。
11、根据本公开的实施例,交叉杆呈交叉剪刀形设置,将丝杆滑块的运动方向转换至与丝杆滑块的运动方向呈90°夹角的运动方向。
12、根据本公开实施例提供的医生控制台,至少包括以下有益效果:
13、通过设置控制台底座设置为底板和脚踏板基座的结构,将脚踏板基座滑动连接至底板,从而能够实现脚踏板基座滑动在水平方向的位置调节。又通过在脚踏板基座的两侧设置摇杆机构和升降机构,通过在竖直作用力的驱动下,与摇杆机构配合以灵活调节脚踏板基座的高度。也即,该医生控制台能够灵活调节脚踏板基座在水平方向和竖直方向的位置,满足不同身高的医生对医生控制台的操作,消除控制台底座上脚踏板基座离地高度需要提高脚来配合引起的操作不适,提升脚部区域操作舒适性,从而提高医生控制台的适用性。
技术特征:
1.一种医生控制台,其特征在于,包括:
2.根据权利要求1所述的医生控制台,其特征在于,所述摇杆机构包括:第二摇杆、第一摇杆和第一摇杆安装座;
3.根据权利要求2所述的医生控制台,其特征在于,所述升降机构包括:
4.根据权利要求3所述的医生控制台,其特征在于,所述第二摇杆还设有轨道,所述脚踏板基座上还设有摇杆轨道移动用滚轮和地面移动用滚轮;
5.根据权利要求2所述的医生控制台,其特征在于,所述医生控制台还包括扭力杆机构,所述扭力杆机构包括第一扭力杆、两根第二扭力杆、两个扭力杆用滚轮和第一扭力杆安装座;
6.根据权利要求1所述的医生控制台,其特征在于,所述医生控制台还包括驱动机构,所述驱动机构包括驱动电机和传动机构;
7.根据权利要求6所述的医生控制台,其特征在于,所述传动机构包括联轴器、滚珠丝杆副、丝杆滑块、运动换向组件和导轨组件;
8.根据权利要求7所述的医生控制台,其特征在于,所述滚珠丝杆副包括丝杆、两个螺母、第一直线导轨和丝杆座本体;
9.根据权利要求7所述的医生控制台,其特征在于,所述运动换向组件包括交叉杆、第一铰链件、第二铰链件和铰链件安装座;
10.根据权利要求9所述的医生控制台,其特征在于,所述交叉杆呈交叉剪刀形设置,将所述丝杆滑块的运动方向转换至与所述丝杆滑块的运动方向呈90°夹角的运动方向。
技术总结
本公开提供一种医生控制台,包括:控制台底座,包括底板和脚踏板基座,脚踏板基座滑动连接至底板,相对于底板沿水平方向滑动;摇杆机构,设置于脚踏板基座的两侧;升降机构,设置于脚踏板基座的两侧;升降机构被配置为在竖直作用力的驱动下,与摇杆机构配合以调节脚踏板基座的高度;立柱,一端固定在控制台底座上;主手,滑动连接在立柱上;显示器,滑动连接在立柱上;肘托扶手,滑动连接在立柱上;其中,肘托扶手上设有触摸屏,通过触摸屏控制主手、显示器和肘托扶手的电动升降。该医生控制台能够实现灵活调节脚踏板基座在水平方向和竖直方向的位置。
技术研发人员:徐超,陈汉清,李志江,高德中,高连胜
受保护的技术使用者:杭州华匠医学机器人有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!