自动化注射机器人及其控制方法与流程
本发明涉及养殖自动化设备,特别是涉及自动化注射机器人及其控制方法。
背景技术:
1、在养殖行业,提前对饲养动物注射疫苗是预防疾病的一重要措施。特别是大规模养殖场合,若出现疾病传播将带来巨大损失。疫苗接种过程对注射位置准确度具有一定要求,而且所饲养的动物处于不断活动状态,较难控制,这些都给免疫作业带来的较大困难,导致接种效率较低。而且人工注射时,养殖人员和饲养动物之间不免要接触,存在较大传染风险。
技术实现思路
1、本发明针对接种效率低,传染风险大问题,提出了一种自动化注射机器人及其控制方法,能够实现自动化注射,提升注射效率,避免养殖人员直接与饲养动物接触,大大降低传染风险。
2、一种自动化注射机器人,包括:
3、agv底盘;
4、导航系统,所述导航系统设置在所述agv底盘上,所述导航系统能够根据指令控制所述agv底盘运动到目标站点;
5、机械臂,所述机械臂设置在所述agv底盘上;
6、注射夹具,所述注射夹具设置在所述机械臂的末端,所述注射夹具用于夹持注射器并触发注射器注射液体。
7、上述方案提供了一种自动化注射机器人,能够实现自动化注射,提升注射效率,避免养殖人员直接与饲养动物接触,大大降低传染风险。具体地,使用时所述导航系统根据指令控制agv底盘运动到目标站点,然后所述机械臂运动使得所述注射夹具处于可注射位置,然后注射夹具运作触发注射器使得注射器内液体被推出,进而自动完成注射过程。
8、在其中一个实施例中,所述agv底盘上设有机器人车身,所述导航系统和所述机械臂均设置在所述机器人车身上,且所述机器人车身上设有用于储存注射器供液系统的放置槽;注射器设置在注射夹具内,通过输液管与供液系统连接。
9、在其中一个实施例中,所述导航系统包括设置在所述agv底座上的激光雷达;
10、和/或,所述机械臂为六轴机械臂。
11、在其中一个实施例中,所述注射夹具上装配有图像采集设备,所述图像采集设备与所述自动化注射机器人的控制器电性连接,所述控制器能够根据所述图像采集设备采集到的图像信息驱动所述机械臂运动。
12、在其中一个实施例中,所述自动化注射机器人还包括无针注射器;
13、所述注射夹具包括固定部、活动夹持部和防撞弹性件,所述固定部与所述机械臂的活动端连接,所述活动夹持部与所述固定部滑动配合,且防撞弹性件作用在所述固定部与所述活动夹持部之间,所述防撞弹性件的弹性力方向与所述活动夹持部相对于所述固定部可滑动的方向平行或者呈夹角设置,所述活动夹持部夹持所述无针注射器,且所述活动夹持部能够触发所述无针注射器的注射按钮。
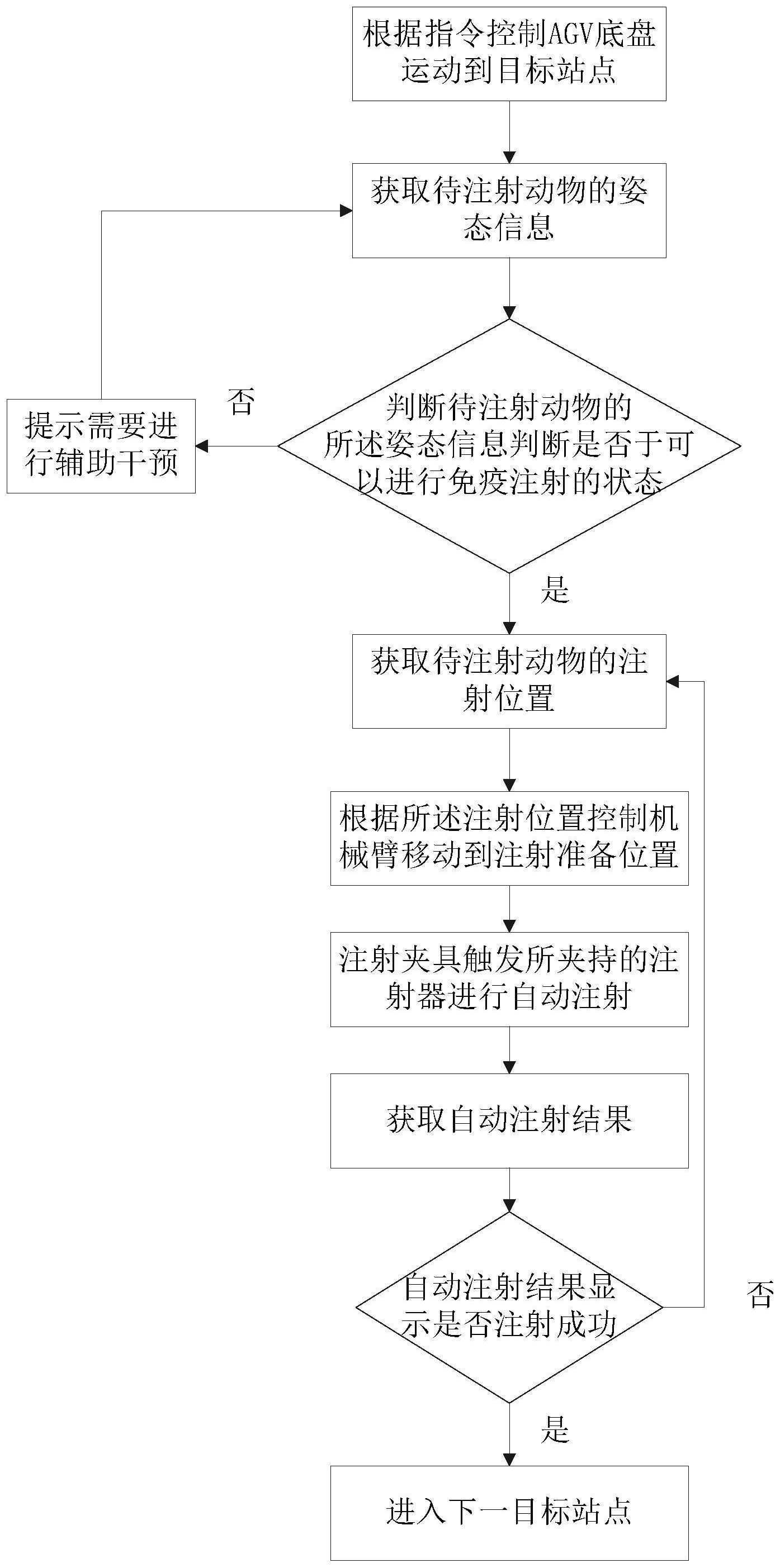
14、一种自动化注射机器人控制方法,所述自动化注射机器人为上述的自动化注射机器人,所述控制方法包括以下步骤:
15、s1、根据指令控制agv底盘运动到目标站点;
16、s2、获取待注射动物的注射位置;
17、s3、根据所述注射位置控制机械臂移动到注射准备位置;
18、s4、注射夹具触发所夹持的注射器进行自动注射。
19、上述方案提供了一种自动化注射机器人控制方法,能够控制自动化注射机器人自动完成注射过程,提高注射效率,避免养殖人员直接与饲养动物接触,大大降低传染风险。
20、在其中一个实施例中,在步骤s4之后还包括以下步骤:
21、获取自动注射结果;
22、若所述自动注射结果显示注射失败则返回步骤s2。
23、在其中一个实施例中,步骤s3具体包括以下步骤:
24、控制机械臂移动到所述注射器距离所述注射位置预设准备距离的位置。
25、在其中一个实施例中,步骤s4具体包括以下步骤:
26、控制所述注射夹具的驱动件启动,使得驱动件能够将所述注射器前推至压上位于注射位置的目标表面,并触发注射器注射按钮。
27、在其中一个实施例中,在步骤s2之前还包括以下步骤:
28、获取待注射动物的姿态信息;
29、若待注射动物的所述姿态信息显示其处于无法进行免疫注射的状态,则提示需要进行辅助干预;
30、若带注射动物的所述姿态信息显示其处于可进行免疫注射的状态,则实施步骤s2。
技术特征:
1.一种自动化注射机器人,其特征在于,包括:
2.根据权利要求1所述的自动化注射机器人,其特征在于,所述agv底盘上设有机器人车身,所述导航系统和所述机械臂均设置在所述机器人车身上,且所述机器人车身上设有用于储存注射器供液系统的放置槽;注射器设置在注射夹具内,通过输液管与供液系统连接。
3.根据权利要求1所述的自动化注射机器人,其特征在于,所述导航系统包括设置在所述agv底座上的激光雷达;
4.根据权利要求1至3任一项所述的自动化注射机器人,其特征在于,所述注射夹具上装配有图像采集设备,所述图像采集设备与所述自动化注射机器人的控制器电性连接,所述控制器能够根据所述图像采集设备采集到的图像信息驱动所述机械臂运动。
5.根据权利要求1至3任一项所述的自动化注射机器人,其特征在于,所述自动化注射机器人还包括无针注射器;
6.一种自动化注射机器人控制方法,其特征在于,所述自动化注射机器人为权利要求1至5任一项所述的自动化注射机器人,所述控制方法包括以下步骤:
7.根据权利要求6所述的自动化注射机器人控制方法,其特征在于,在步骤s4之后还包括以下步骤:
8.根据权利要求6所述的自动化注射机器人控制方法,其特征在于,步骤s3具体包括以下步骤:
9.根据权利要求6所述的自动化注射机器人控制方法,其特征在于,步骤s4具体包括以下步骤:
10.根据权利要求6至9任一项所述的自动化注射机器人控制方法,其特征在于,在步骤s2之前还包括以下步骤:
技术总结
本发明涉及一种自动化注射机器人及其控制方法,包括AGV底盘、导航系统、机械臂和注射夹具,所述导航系统设置在所述AGV底盘上,所述导航系统能够根据指令控制所述AGV底盘运动到目标站点。所述机械臂设置在所述AGV底盘上。所述注射夹具设置在所述机械臂的末端,所述注射夹具用于夹持注射器并触发注射器注射液体。使用时所述导航系统根据指令控制AGV底盘运动到目标站点,然后所述机械臂运动使得所述注射夹具处于可注射位置,然后注射夹具运作触发注射器使得注射器内液体被推出,进而自动完成注射过程。能够实现自动化注射,提升注射效率,避免养殖人员直接与饲养动物接触,大大降低传染风险。
技术研发人员:徐晨,孙晋祥,何永泰,宋爽,王建兵,倪进,王罡,黄伟伟,黄情宇,刘哲
受保护的技术使用者:温氏食品集团股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!