基于超声图像进行超声自动检测的方法及系统
本发明涉及自动控制技术,尤其涉及基于超声图像质量,来对超声机器人的探头进行自动反馈控制的,超声自动检测方法及系统。
背景技术:
1、b型超声检查,俗称“b超”,被广泛用于医疗检查中。在检测过程中,通常由医生操控探头,通过观察显示屏中显示的超声图像,依据自身经验对对探头的方向、位置、角度等进行调节,从而控制探头到目标位置,获得高质量的目标区域的检测图像。
2、因此b超检测的探头控制,高度依赖于操作医生自身的经验,然而当今社会对医疗资源需求不断增加,而培养一名有经验的医师需要一定的时间与资源,短期内无法填补超声人才缺口。
3、为此现有技术曾提出过,采用具有多自由度的机器人模仿医师检测时的手法,以移动b超检测探头对人体进行自动检测的方案,然而此类现有技术的问题在于,由于不同医师的临床经验不同,医师之间操作探头时的位姿调整也各不相同,因此缺乏定量分析及规范,从而导致针对不同被测者的自动检测结果可能并不理想。
4、另一方面,若仅仅依靠某些医师的经验来进行自动检测的手法规划,则此类对医师经验高度依赖的方案,并不一定适合,也会使得检测效率降低。
技术实现思路
1、为此,本发明的主要目的在于提供一种基于超声图像进行超声自动检测的方法及系统,以根据超声图像质量,来对超声探头的位姿进行自适应调整,以获得理想的超声检测图像。
2、为了实现上述目的,根据本发明的第一个方面,提供了一种基于超声图像进行超声自动检测的方法,其步骤包括:
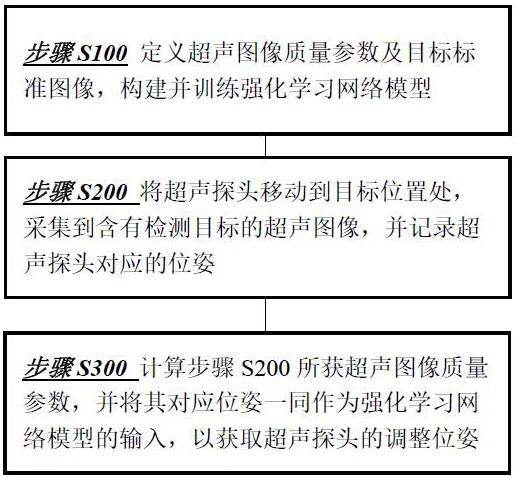
3、步骤s100 定义超声图像质量参数及目标标准图像,构建并训练强化学习网络模型;
4、步骤s200 将超声探头移动到目标位置处,采集到含有检测目标的超声图像,并记录超声探头对应的位姿;
5、步骤s300 计算步骤s200所获超声图像质量参数,并将其对应位姿一同作为强化学习网络模型的输入,以获取超声探头的调整位姿。
6、在可能的优选实施方式中,步骤s100中,所述定义超声图像质量参数及目标标准图像的步骤包括:
7、步骤s110 根据超声图像的边缘特征和空间特征,定义超声图像质量参数q:
8、;
9、其中和分别为所获超声图像和预设目标标准图像的目标组织内外部灰度差,s为目标组织显示的图像完整度;
10、步骤s111 取得数张高质量的目标组织的超声图像,求出灰度差及图像完整度的均值作为标准数值进行计算,选取最接近均值的一张图像作为目标标准图像。
11、在可能的优选实施方式中,步骤s100中,所述构建并训练强化学习网络模型的步骤包括:
12、步骤s120 构建actor网络,将包括超声图像质量参数q及对应超声探头位姿在内的环境状态作为输入,以定义输出对应的位姿变换向量h;构建critic网络,将包括位姿变换向量h及环境状态作为输入,以定义输出用于评价位姿变换向量h质量的奖励值r;
13、步骤s121定义损失函数:
14、;
15、其中,为预测的超声探头位姿变换后超声图像质量q值,为真实执行位姿变换向量h后获得的超声图像质量q值,为均方根误差;
16、步骤s122训练强化学习网络模型:根据损失函数进行梯度下降运算,对网络参数进行更新,循环数次、或所获超声图像质量值超越目标标准图像的时,训练结束。
17、在可能的优选实施方式中,步骤s122中还包括步骤:设定经验回放池,且最初数回合为经验回放池填充步骤,不进行训练;在填充经验回放池的过程中,在最初数回合采用基于示教的方式,在对机械臂移动空间进行约束下采集样本数据,以填充经验回放池。
18、在可能的优选实施方式中,填充经验回放池的步骤包括:
19、步骤s130根据目标标准图像对应的超声探头位姿为中心点,以预设距离为单位,建立平面点阵,记录移动超声探头至各个点位时的位姿为一个回合样本,将该样本填入经验回放池;
20、步骤s131 分别记录各个网格下的超声图像质量q值,选择其中得分最高的数个网格,分别将超声探头以对应各网格的位姿为起点,进行自旋转,每顺时针旋转60°记录一次超声图像质量q值样本,共旋转五次,以将所获的样本填入经验回放池。
21、在可能的优选实施方式中,填充经验回放池的步骤包括:
22、步骤s132 设定筛选参数,判断最初数回合之后的样本奖励值,当其达到经验回放池内平均奖励值的倍时,视为有效样本填入经验回放池。
23、在可能的优选实施方式中,填充经验回放池的步骤包括:
24、步骤s133 定义衰减因子,其中t为训练次数,定义筛选参数;判断最初数回合之后的样本奖励值,当其达到经验回放池内平均奖励值的倍时,视为有效样本填入经验回放池。
25、为了实现上述目的,根据本发明的第二个方面,还提供了一种基于超声图像进行超声自动检测的系统,其包括:
26、存储单元,用于存储包括如上任一所述基于超声图像进行超声自动检测的方法步骤的程序,以供控制单元,处理单元,适时调取执行;
27、控制单元,用于操控机械臂携带超声单元的超声探头移动到目标位置处,采集含有检测目标的超声图像,并记录超声探头对应的位姿;
28、处理单元,用于计算所获超声图像质量参数,并将其对应位姿一同作为强化学习网络模型的输入,以获取超声探头的调整位姿。
29、通过本发明提供的该基于超声图像进行超声自动检测的方法及系统,实现了基于超声图像,对机械臂位姿进行伺服反馈控制,解决了超声机器人对探头位姿的自适应控制问题。
30、从而使得本发明的方案不再依赖于医师检测经验手法,而是以获得的超声图像的质量为客观指标,从而使得最终检测效果趋向于获得理想的超声检测图像,以此提升了此类自动检测方案的实际检测效率和实用价值。
技术特征:
1.基于超声图像进行超声自动检测的方法,其特征在于,步骤包括:
2.根据权要求1所述的方法,其特征在于,步骤s100中,所述定义超声图像质量参数及目标标准图像的步骤包括:
3.根据权要求1所述的方法,其特征在于,步骤s100中,所述构建并训练强化学习网络模型的步骤包括:
4.根据权要求3所述的方法,其特征在于,步骤s122中还包括步骤:设定经验回放池,且最初数回合为经验回放池填充步骤,不进行训练;在填充经验回放池的过程中,在最初数回合采用基于示教的方式,在对机械臂移动空间进行约束下采集样本数据,以填充经验回放池。
5.根据权要求4所述的方法,其特征在于,填充经验回放池的步骤包括:
6.根据权要求5所述的方法,其特征在于,填充经验回放池的步骤包括:
7.根据权要求5所述的方法,其特征在于,填充经验回放池的步骤包括:
8.基于超声图像进行超声自动检测的系统,其特征在于包括:
技术总结
本发明提供了一种基于超声图像进行超声自动检测的方法及系统,其中方法步骤包括:步骤S100 定义超声图像质量参数及目标标准图像,构建并训练强化学习网络模型;步骤S200 将超声探头移动到目标位置处,采集到含有检测目标的超声图像,并记录超声探头对应的位姿;步骤S300 计算步骤S200所获超声图像质量参数,并将其对应位姿一同作为强化学习网络模型的输入,以获取超声探头的调整位姿,籍此以根据超声图像质量,来对超声探头的位姿进行自适应调整,以获得理想的超声检测图像。
技术研发人员:赵妍卓,迟雪仪,赵炫,潘宇真,他得安,商慧亮
受保护的技术使用者:复旦大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!