具有快速缓冲机构的行走助力机器人外骨骼结构
本发明涉及医疗辅助设备,具体为具有快速缓冲机构的行走助力机器人外骨骼结构。
背景技术:
1、行走助力机器人外骨骼结构是一种可穿戴的医疗辅助设备,在使用的过程中可以为使用者提供腿部的支撑,进而辅助使用者行走前进,现有的行走助力机器人外骨骼结构基本可以满足日常的使用需求,但仍存在一定的不足之处,其一,现有行走助力机器人外骨骼结构的助力结构单一,主要通过为膝盖的转动提供支撑辅助使用者的行走,但是无法在使用过程中会为脚踝部位提供辅助支撑,从而影响了患者的使用体验;其二,现有的行走助力机器人外骨骼结构难以根据使用者的骨骼长度来调节外骨骼结构中小腿及大腿的有效支撑长度,从而影响了外骨骼结构的实用性;其三,现有行走助力机器人外骨骼结构缺乏缓冲结构,使用过程中助力结构失效会导致大腿及小腿骨骼间的支撑结构消失,从而致使患者跌受伤,存在一定的安全隐患;因此设计具有快速缓冲机构的行走助力机器人外骨骼结构是很有必要的。
技术实现思路
1、本发明的目的在于提供具有快速缓冲机构的行走助力机器人外骨骼结构,以解决上述背景技术中提出的问题。
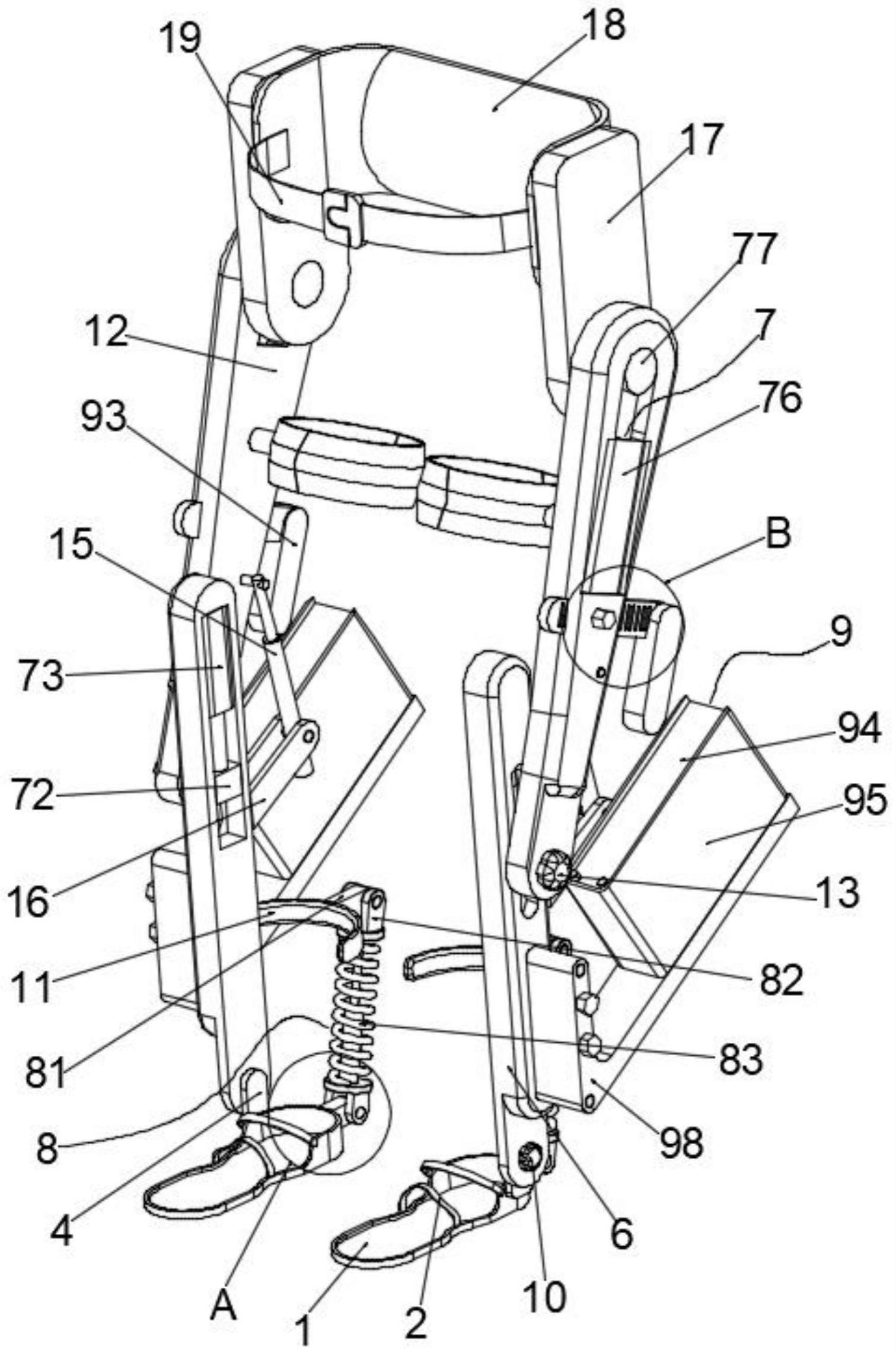
2、为实现上述目的,本发明提供如下技术方案:具有快速缓冲机构的行走助力机器人外骨骼结构,包括足部支撑、第一绑带、第二绑带、足部连接块、足部转动台、小腿骨骼、调节组件、足部辅助组件、缓冲防护组件、足部锁紧柱、小腿支架、大腿骨骼、小腿锁紧柱、刚性支柱、助力气缸、助力支架、腰部连接块、腰部支架和腰部绑带,所述足部支撑上分别设置有第一绑带和第二绑带,且足部支撑的一侧设置有足部连接块,足部连接块的一侧设置有足部转动台,且足部转动台上转动连接有小腿骨骼,足部转动台上开设的螺纹孔中配合连接有足部锁紧柱,且足部锁紧柱贴合在小腿骨骼的一侧,小腿骨骼上设置有小腿支架,且小腿支架上设置有足部辅助组件中的第一连接块。
3、优选的,所述足部辅助组件由第一连接块、顶部支撑、辅助弹簧、底部支撑和第二连接块组成,第一连接块上转动连接有顶部支撑,且顶部支撑的底部设置有辅助弹簧,辅助弹簧,辅助弹簧的底端固定在底部支撑上,且底部支撑的顶部设置有阻尼器,阻尼器的顶端固定在顶部支撑上,且阻尼器位于辅助弹簧的内部,底部支撑上转动连接有第二连接块,且第二连接块固定在足部支撑上。
4、优选的,所述小腿骨骼的一侧顶部开设有调节组件中的小腿调节槽,所述调节组件由小腿调节槽、小腿调节块、小腿调节气缸、第一调节轴、大腿调节槽、大腿调节气缸和第二调节柱组成,小腿调节槽中滑动连接有第一调节轴,且第一调节轴固定在小腿调节块的一侧,小腿调节块固定在小腿调节气缸的输出端上,且小腿调节气缸固定安装在小腿骨骼上的凹槽中。
5、优选的,所述第一调节轴上转动连接有大腿骨骼,且第一调节轴上开设的螺纹槽中配合连接有小腿锁紧柱,小腿锁紧柱的贴合在大腿骨骼上,大腿骨骼的一侧顶部开设有大腿调节槽,且大腿调节槽中滑动连接有第二调节柱,第二调节柱固定连接大腿调节气缸的输出端,且大腿调节气缸固定安装在大腿骨骼上的凹槽中。
6、优选的,所述大腿骨骼上开设的通孔中设置有刚性支柱,且刚性支柱铰接在助力气缸的输出端上,助力气缸的底部转动连接在助力支架上,且助力支架固定在小腿骨骼上。
7、优选的,所述第二调节柱上转动连接有腰部连接块,且腰部连接块对称固定在腰部支架的两侧,腰部支架上设置有腰部绑带。
8、优选的,所述大腿骨骼上开设的滑槽中滑动连接有缓冲防护组件中的调节板,所述缓冲防护组件由安装螺栓、调节板、防滑槽、撞击块、缓冲件、缓冲支架、导柱、缓冲弹簧、安装支架和限位柱组成,大腿骨骼上开设的螺纹螺纹槽中配合连接有锁止螺栓,且锁止螺栓的一侧贴合在调节板上,调节板靠近锁止螺栓的一侧均匀开设有防滑槽,且调节板的底部设置有撞击块。
9、优选的,所述限位柱固定在小腿骨骼上,且限位柱套接在安装支架上,安装支架上开设的通孔中转动连接有安装螺栓,且安装螺栓的一端通过螺纹配合连接在小腿骨骼上,安装支架上均匀设置有缓冲弹簧,安装支架上设置有阻尼器,且阻尼器位于缓冲弹簧的内部,缓冲弹簧的顶端固定在缓冲件上,且阻尼器的顶端固定在缓冲件的底部,缓冲件滑动连接在缓冲支架上,且缓冲支架固定在安装支架上,安装支架的顶部对称设置有导柱,且导柱滑动连接在缓冲件上开设的通孔中。
10、与现有技术相比,本发明的有益效果是:该具有快速缓冲机构的行走助力机器人外骨骼结构,通过设置的足部辅助组件在足部支撑与小腿骨骼之间形成脚踝部位的辅助支撑结构,行走时小腿骨骼绕着足部转动台转动,通过辅助弹簧积蓄势能,在足部支撑转动归位时弹力辅助患者的足部归位,从而提高了患者的使用体验;通过设置的小腿调节气缸带动第一调节轴在小腿调节槽中滑动,调节小腿骨骼的有限支撑长度,同时利用大腿调节气缸带动第二调节柱在大腿调节槽中滑动,调节大腿骨骼的有限支撑长度,进而提高了外骨骼结构的实用性;当助力结构失效时小腿骨骼与大腿骨骼之间的支撑结构消失,大腿骨骼绕着第一调节轴转动,使撞击块靠近并撞击缓冲件,随后挤压缓冲弹簧进行缓冲,并利用缓冲弹簧之间的阻尼器消耗冲击的势能,在助力结构失效后为大腿骨骼提供快速缓冲,避免患者出现跌坐受伤,消除了安全隐患。
技术特征:
1.具有快速缓冲机构的行走助力机器人外骨骼结构,包括足部支撑(1)、第一绑带(2)、第二绑带(3)、足部连接块(4)、足部转动台(5)、小腿骨骼(6)、调节组件(7)、足部辅助组件(8)、缓冲防护组件(9)、足部锁紧柱(10)、小腿支架(11)、大腿骨骼(12)、小腿锁紧柱(13)、刚性支柱(14)、助力气缸(15)、助力支架(16)、腰部连接块(17)、腰部支架(18)和腰部绑带(19),其特征在于:所述足部支撑(1)上分别设置有第一绑带(2)和第二绑带(3),且足部支撑(1)的一侧设置有足部连接块(4),足部连接块(4)的一侧设置有足部转动台(5),且足部转动台(5)上转动连接有小腿骨骼(6),足部转动台(5)上开设的螺纹孔中配合连接有足部锁紧柱(10),且足部锁紧柱(10)贴合在小腿骨骼(6)的一侧,小腿骨骼(6)上设置有小腿支架(11),且小腿支架(11)上设置有足部辅助组件(8)中的第一连接块(81)。
2.根据权利要求1所述的具有快速缓冲机构的行走助力机器人外骨骼结构,其特征在于:所述足部辅助组件(8)由第一连接块(81)、顶部支撑(82)、辅助弹簧(83)、底部支撑(84)和第二连接块(85)组成,第一连接块(81)上转动连接有顶部支撑(82),且顶部支撑(82)的底部设置有辅助弹簧(83),辅助弹簧(83),辅助弹簧(83)的底端固定在底部支撑(84)上,且底部支撑(84)的顶部设置有阻尼器,阻尼器的顶端固定在顶部支撑(82)上,且阻尼器位于辅助弹簧(83)的内部,底部支撑(84)上转动连接有第二连接块(85),且第二连接块(85)固定在足部支撑(1)上。
3.根据权利要求1所述的具有快速缓冲机构的行走助力机器人外骨骼结构,其特征在于:所述小腿骨骼(6)的一侧顶部开设有调节组件(7)中的小腿调节槽(71),所述调节组件(7)由小腿调节槽(71)、小腿调节块(72)、小腿调节气缸(73)、第一调节轴(74)、大腿调节槽(75)、大腿调节气缸(76)和第二调节柱(77)组成,小腿调节槽(71)中滑动连接有第一调节轴(74),且第一调节轴(74)固定在小腿调节块(72)的一侧,小腿调节块(72)固定在小腿调节气缸(73)的输出端上,且小腿调节气缸(73)固定安装在小腿骨骼(6)上的凹槽中。
4.根据权利要求3所述的具有快速缓冲机构的行走助力机器人外骨骼结构,其特征在于:所述第一调节轴(74)上转动连接有大腿骨骼(12),且第一调节轴(74)上开设的螺纹槽中配合连接有小腿锁紧柱(13),小腿锁紧柱(13)的贴合在大腿骨骼(12)上,大腿骨骼(12)的一侧顶部开设有大腿调节槽(75),且大腿调节槽(75)中滑动连接有第二调节柱(77),第二调节柱(77)固定连接大腿调节气缸(76)的输出端,且大腿调节气缸(76)固定安装在大腿骨骼(12)上的凹槽中。
5.根据权利要求4所述的具有快速缓冲机构的行走助力机器人外骨骼结构,其特征在于:所述大腿骨骼(12)上开设的通孔中设置有刚性支柱(14),且刚性支柱(14)铰接在助力气缸(15)的输出端上,助力气缸(15)的底部转动连接在助力支架(16)上,且助力支架(16)固定在小腿骨骼(6)上。
6.根据权利要求4所述的具有快速缓冲机构的行走助力机器人外骨骼结构,其特征在于:所述第二调节柱(77)上转动连接有腰部连接块(17),且腰部连接块(17)对称固定在腰部支架(18)的两侧,腰部支架(18)上设置有腰部绑带(19)。
7.根据权利要求5所述的具有快速缓冲机构的行走助力机器人外骨骼结构,其特征在于:所述大腿骨骼(12)上开设的滑槽中滑动连接有缓冲防护组件(9)中的调节板(91),所述缓冲防护组件(9)由安装螺栓(90)、调节板(91)、防滑槽(92)、撞击块(93)、缓冲件(94)、缓冲支架(95)、导柱(96)、缓冲弹簧(97)、安装支架(98)和限位柱(99)组成,大腿骨骼(12)上开设的螺纹螺纹槽中配合连接有锁止螺栓,且锁止螺栓的一侧贴合在调节板(91)上,调节板(91)靠近锁止螺栓的一侧均匀开设有防滑槽(92),且调节板(91)的底部设置有撞击块(93)。
8.根据权利要求7所述的具有快速缓冲机构的行走助力机器人外骨骼结构,其特征在于:所述限位柱(99)固定在小腿骨骼(6)上,且限位柱(99)套接在安装支架(98)上,安装支架(98)上开设的通孔中转动连接有安装螺栓(90),且安装螺栓(90)的一端通过螺纹配合连接在小腿骨骼(6)上,安装支架(98)上均匀设置有缓冲弹簧(97),安装支架(98)上设置有阻尼器,且阻尼器位于缓冲弹簧(97)的内部,缓冲弹簧(97)的顶端固定在缓冲件(94)上,且阻尼器的顶端固定在缓冲件(94)的底部,缓冲件(94)滑动连接在缓冲支架(95)上,且缓冲支架(95)固定在安装支架(98)上,安装支架(98)的顶部对称设置有导柱(96),且导柱(96)滑动连接在缓冲件(94)上开设的通孔中。
技术总结
本发明公开了具有快速缓冲机构的行走助力机器人外骨骼结构,包括足部支撑、小腿骨骼、调节组件、足部辅助组件、缓冲防护组件、大腿骨骼、助力气缸和腰部绑带,所述足部支撑上分别设置有第一绑带和第二绑带,本发明,通过设置的足部辅助组件在足部支撑与小腿骨骼之间形成脚踝部位的辅助支撑结构,行走时弹力辅助患者的足部归位,提高了患者的使用体验;通过设置的调节组件便于根据用户的骨骼长度来调节小腿及大腿骨骼的有效支撑长度,提高了外骨骼结构的实用性;当助力结构失效时利用设置的缓冲防护组件在小腿骨骼与大腿骨骼之间提供快速缓冲支撑,避免小腿骨骼与大腿骨骼之间的夹角过小导致患者跌坐受伤,提高了外骨骼结构的安全性能。
技术研发人员:刘海燕
受保护的技术使用者:山东交通学院
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!