流速控制方法、流速控制装置及呼吸机与流程
本发明属于呼吸机,尤其涉及流速控制方法、流速控制装置及呼吸机。
背景技术:
1、呼吸机是一种能代替、控制或改变人的正常生理呼吸,增加肺通气量,改善呼吸功能,减轻呼吸功消耗,节约心脏储备能力的装置。呼吸机有多种通气方式以适应不同患者人群和特定呼吸疾病的需求。呼吸机一次通气分为吸气相和呼气相。在吸气相和呼吸相呼吸机根据设置的氧浓度、潮气量、压力、时间等参数对执行机构进行控制,使之输出一定流速的气体以满足临床需求。此处执行机构可以是比例阀、微涡轮等。呼吸机在通气过程中,吸气相、呼气相的控制流速不同,某些参数下差别还很大,针对吸气相和呼气相过程中的流速控制描述很多,如pid控制、自适应控制等,但是在吸呼相位切换瞬间的流速控制涉及很少,对于一个完整的通气周期,切换过程中流速的控制同样重要,处理不好气流会发生震颤导致患者不舒服,直接影响呼吸机的品质。
技术实现思路
1、本发明的目的在于克服现有技术缺陷,提出了流速控制方法、流速控制装置及呼吸机。
2、为了实现上述目的,本发明提出了一种流速控制方法,所述方法包括:
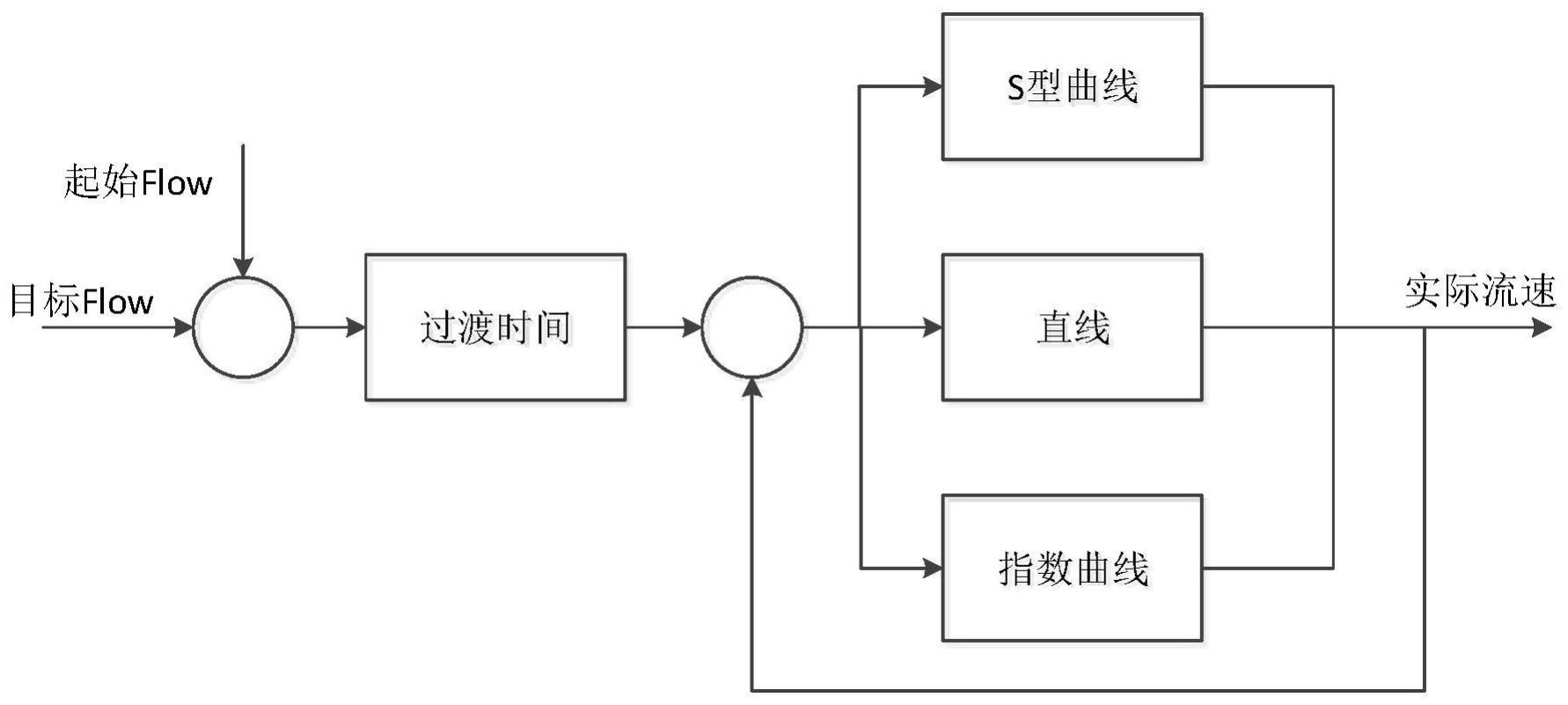
3、在呼吸机由吸气相转呼气相时,按照预设的切换时间和过渡曲线,控制流速由吸气末流速调整至呼气相目标流速;
4、在呼吸机由呼气相转吸气相时,按照预设的切换时间和过渡曲线,控制流速由呼气末流速调整至吸气相初始目标流速。
5、作为上述方法的一种改进,在呼吸机由吸气相转呼气相时,所述切换时间是50ms~200ms;
6、在呼吸机由呼气相转吸气相时,所述切换时间是30ms~80ms。
7、作为上述方法的一种改进,所述过渡曲线为指数曲线、直线或s型曲线。
8、作为上述方法的一种改进,在呼吸机由吸气相转呼气相时,当过渡曲线为指数曲线,满足下式:
9、flow(t)=flow2+(flow1-flow2)×(1-e-t×4/ct) t∈(0,ct)
10、当过渡曲线为直线,满足下式:
11、flow(t)=flow1-(flow1-flow2)×t/ct t∈(0,ct)
12、当过渡曲线为s型曲线,满足下式:
13、flow(t)=flow1-3×(flow1-flow2)×t2/ct2+2×(flow1-flow2)×t3/ct3 t∈(0,ct)
14、其中,flow(t)表示具体的流速变化,t表示相对调整开始的时间,flow1和flow2分别为吸气末流速和呼气相目标流速,ct为切换时间。
15、作为上述方法的一种改进,在呼吸机由呼气相转吸相时,当过渡曲线为指数曲线,满足下式:
16、flow(t)=flow3+(flow4-flow3)×(1-e-t×4/ct) t∈(0,ct)
17、当过渡曲线为直线,满足下式:
18、flow(t)=flow3+(flow4-flow3)×t/ct t∈(0,ct)
19、当过渡曲线为s型曲线,满足下式:
20、flow(t)=flow3+3×(flow4-flow3)×t2/ct2-2×(flow4-flow3)×t3/ct3 t∈(0,ct)
21、其中,flow(t)表示具体的流速变化,t表示相对调整开始的时间,flow3和flow4分别为呼气末流速和吸气相初始目标流速,ct为切换时间。
22、作为上述方法的一种改进,所述过渡曲线的类型与切换时间根据呼吸机系统及执行机构响应速度进行选取,并结合反馈流速。
23、另一方面,本发明提出了一种流速控制装置,用于呼吸机相位切换过程中,所述装置包括:
24、吸气相转呼气相调节模块,用于在呼吸机由吸气相转呼气相时,按照预设的切换时间和过渡曲线,控制流速由吸气末流速调整至呼气相目标流速;
25、呼气相转吸气相调节模块,用于在呼吸机由呼气相转吸气相时,按照预设的切换时间和过渡曲线,控制流速由呼气末流速调整至吸气相初始目标流速。
26、再一方面,本发明提出了一种呼吸机,包含流速控制装置,所述装置包括:
27、吸气相转呼气相调节模块,用于在呼吸机由吸气相转呼气相时,按照预设的切换时间和过渡曲线,控制流速由吸气末流速调整至呼气相目标流速;
28、呼气相转吸气相调节模块,用于在呼吸机由呼气相转吸气相时,按照预设的切换时间和过渡曲线,控制流速由呼气末流速调整至吸气相初始目标流速。
29、与现有技术相比,本发明的优势在于:
30、1、现有技术对相位切换时的流速控制是阶跃信号,在相位变化时气流发生紊乱,患者不舒适。而本发明提出了一种吸呼相位切换时流速控制方法,该方法体现连续控制,不发生阶跃;
31、2、现有技术没有考虑系统最优,控制信号与整个系统不匹配,本发明提出三种曲线平稳过渡,基本涵盖了快、中、慢三种系统响应的过渡;
32、3、与现有技术对比,本专利利用流速反馈信号,时时调整切换曲线,自动选择气流平滑过渡,增加患者使用呼吸机的舒适性;
33、4、本发明的方法已在呼吸机上实现,取得了很好的技术效果。
技术特征:
1.一种流速控制方法,用于呼吸机相位切换过程中,所述方法包括:
2.根据权利要求1所述的流速控制方法,其特征在于,在呼吸机由吸气相转呼气相时,所述切换时间是50ms~200ms;在呼吸机由呼气相转吸气相时,所述切换时间是30ms~80ms。
3.根据权利要求2所述的流速控制方法,其特征在于,在呼吸机由吸气相转呼气相时,所述过渡曲线为指数曲线、直线或s型曲线。
4.根据权利要求3所述的流速控制方法,其特征在于,在呼吸机由吸气相转呼气相时,当过渡曲线为指数曲线,满足下式:
5.根据权利要求3所述的流速控制方法,其特征在于,在呼吸机由呼气相转吸相时,当过渡曲线为指数曲线,满足下式:
6.根据权利要求4或5所述的流速控制方法,其特征在于,所述过渡曲线的类型与切换时间根据呼吸机系统及执行机构响应速度进行选取,并结合反馈流速。
7.一种流速控制装置,用于呼吸机相位切换过程中,其特征在于,所述装置包括:
8.一种呼吸机,包含流速控制装置,其特征在于,所述装置包括:
技术总结
本发明属于呼吸机技术领域,尤其涉及流速控制方法、流速控制装置及呼吸机。所述方法包括:在呼吸机由吸气相转呼气相时,按照预设的切换时间和过渡曲线,控制流速由吸气末流速调整至呼气相目标流速;在呼吸机由呼气相转吸气相时,按照预设的切换时间和过渡曲线,控制流速由呼气末流速调整至吸气相初始目标流速。采用本发明的流速控制方法,能够对流速进行连续控制,不发生阶跃,克服在呼吸机相位切换过程中气流发生震颤导致患者不舒适性,提高呼吸机的品质。
技术研发人员:常立云,焦金鑫
受保护的技术使用者:北京谊安和顺科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!