一种带有双触控功能的开关把手及手术机器人的制作方法
本发明属于手术机器人扩展工具领域,更具体地,涉及一种带有双触控功能的开关把手以及具有所述开关把手的手术机器人。
背景技术:
1、市面上有具备末端关节高自由度的手术机器人,其末端关节上对称设置有两个解锁按钮,为避免手术过程中误触,只有当两个按钮同时按下时,机械臂才能实现解锁。
2、因两个按钮距离较远,且手术操作过程中需要套无菌保护膜使用,通过手直接按压两个按钮,隔着无菌膜操作易发生滑动而脱手的现象,使得机械臂在复锁定前因重力下落,产生手术风险;并且机械臂末端直径较大,使得两按钮距离较远,进行机械臂角度调节时,不容易握持。
技术实现思路
1、本发明的目的是针对现有技术存在的不足,提供了一种带有双触控功能的开关把手,该开关把手固定在手术机器人上,通过控制滑块就能使两个触片向手术机器人方向靠拢,从而使得两个按钮同时解锁,增加操作稳定性和安全性。
2、为了实现上述目的,本发明提供了一种带有双触控功能的开关把手,包括:
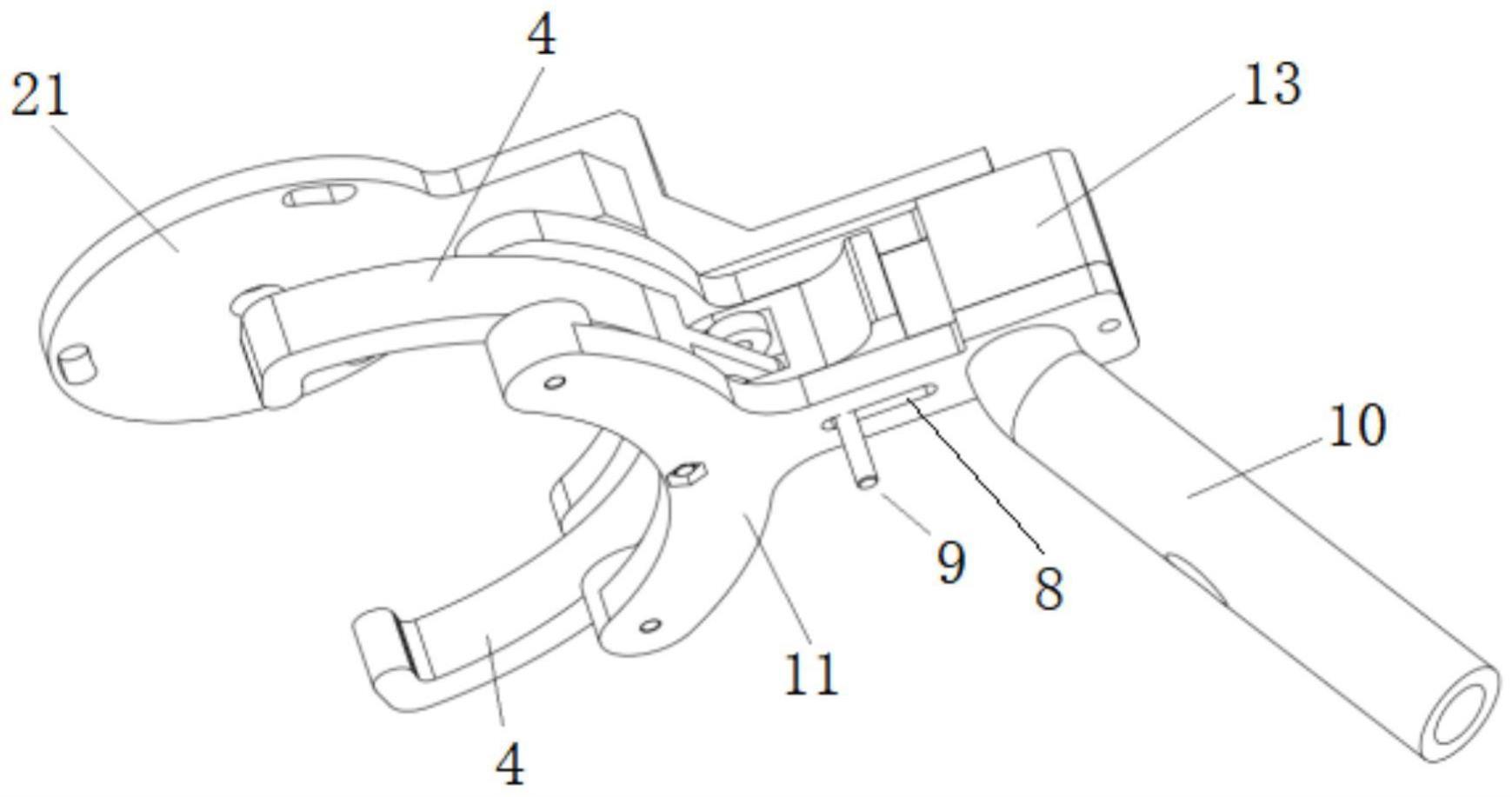
3、把手支架,呈y型,所述把手支架的主体部分上活动设置有滑块,两个所述把手支架的分支部分位于手术机器人的两侧;
4、两个触片,两个所述触片的中部分别与所述把手支架的两个分支部分转动连接,两个所述触片的相互靠近的一端分别设置有长腰孔,两个长腰孔相互交错并与所述滑块连接;
5、所述滑块向第一方向移动时,所述滑块能够带动两个所述触片的相互远离的一端向所述手术机器人方向移动。
6、可选地,所述把手支架的主体部分沿长度方向开设有操作孔,所述操作孔内设置有与所述滑块连接的拨杆。
7、可选地,所述把手支架的主体部分上设置有手柄,所述手柄与所述拨杆形成夹角为15°~90°。
8、可选地,所述把手支架包括底座和上盖,所述底座和所述上盖均呈y型,所述上盖包括连接部,所述上盖通过所述连接部与所述底座连接,所述底座和所述上盖连接形成滑槽,所述滑块设置在所述滑槽内。
9、可选地,所述滑块与所述连接部之间设置有弹簧,所述弹簧能够使所述滑块向第二方向移动,所述第二方向与所述第一方向互为相反方向。
10、可选地,所述上盖上设置有连接件,所述连接件与所述手术机器人可拆卸连接。
11、可选地,所述滑块的一端呈u型,所述弹簧的一端嵌设在所述滑块内,所述弹簧的外周与所述滑块的内壁相配合。
12、可选地,所述滑块的两侧分别设置有凸起部,两个所述凸起部之间的距离大于所述把手支架的主体部分的宽度。
13、可选地,所述滑块的另一端呈c型,两个所述触片的相互靠近的一端嵌设在所述滑块内并通过圆销连接,所述圆销与所述长腰孔滑动配合。
14、可选地,所述触片呈c型,所述触片的相互远离的一端设置有接触块,所述接触块分别与所述手术机器人的双触开关对应设置。
15、本发明还提供一种手术机器人,包括所述的带有双触控功能的开关把手,所述开关把手通过连接件连接到所述手术机器人的端部。
16、本发明提供了一种带有双触控功能的开关把手,其有益效果在于:该开关把手通过连接件与手术机器人连接固定,能够对拨杆进行稳定操作,沿第一方向推动拨杆,能够使滑块带动两个触片向手术机器人方向靠拢,并且将拨杆与手柄之间的角度设置在一定范围内,便于单手操作和降低操作力度,还在滑块和连接部之间设置弹簧,使拨杆不被施力的情况下,滑块不会带动触片移动,两个接触块与机械臂的双触开关分离,保证机械臂的再次锁定。
17、本发明的其它特征和优点将在随后具体实施方式部分予以详细说明。
技术特征:
1.一种带有双触控功能的开关把手,其特征在于,包括:
2.根据权利要求1所述的带有双触控功能的开关把手,其特征在于,所述把手支架的主体部分沿长度方向开设有操作孔,所述操作孔内设置有与所述滑块连接的拨杆。
3.根据权利要求2所述的带有双触控功能的开关把手,其特征在于,所述把手支架的主体部分上设置有手柄,所述手柄与所述拨杆形成夹角为15°~90°。
4.根据权利要求1所述的带有双触控功能的开关把手,其特征在于,所述把手支架包括底座和上盖,所述底座和所述上盖均呈y型,所述上盖包括连接部,所述上盖通过所述连接部与所述底座连接,所述底座和所述上盖连接形成滑槽,所述滑块设置在所述滑槽内。
5.根据权利要求4所述的带有双触控功能的开关把手,其特征在于,所述滑块与所述连接部之间设置有弹簧,所述弹簧能够使所述滑块向第二方向移动,所述第二方向与所述第一方向互为相反方向。
6.根据权利要求5所述的带有双触控功能的开关把手,其特征在于,所述滑块的一端呈u型,所述弹簧的一端嵌设在所述滑块内,所述弹簧的外周与所述滑块的内壁相配合。
7.根据权利要求6所述的带有双触控功能的开关把手,其特征在于,所述滑块的两侧分别设置有凸起部,两个所述凸起部之间的距离大于所述把手支架的主体部分的宽度。
8.根据权利要求6所述的带有双触控功能的开关把手,其特征在于,所述滑块的另一端呈c型,两个所述触片的相互靠近的一端嵌设在所述滑块内并通过圆销连接,所述圆销与所述长腰孔滑动配合。
9.根据权利要求1所述的带有双触控功能的开关把手,其特征在于,所述触片呈c型,所述触片的相互远离的一端设置有接触块,所述接触块分别与所述手术机器人的双触开关对应设置。
10.一种手术机器人,其特征在于,包括如权利要求1-9任一所述的带有双触控功能的开关把手,所述开关把手通过连接件连接到所述手术机器人的端部。
技术总结
本发明公开了一种带有双触控功能的开关把手及手术机器人,涉及手术机器人扩展工具领域,开关把手包括:把手支架,呈Y型,把手支架的主体部分上活动设置有滑块,两个把手支架的分支部分位于机械臂的两侧;两个触片,两个触片的中部分别与把手支架的两个分支部分转动连接,两个触片的相互靠近的一端分别设置有长腰孔,两个长腰孔相互交错并与滑块连接;滑块向第一方向移动时,滑块能够带动两个触片的相互远离的一端向手术机器人方向移动;该开关把手固定在手术机器人上,通过控制滑块就能使两个触片向手术机器人方向靠拢,从而使得两个按钮同时解锁,增加操作稳定性和安全性。
技术研发人员:赵宗凯,朱罡,孙向民
受保护的技术使用者:北京罗森博特科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!