持针器及其穿刺手术机器人、手术导航方法、存储介质与流程
本申请涉及但不限于医疗,尤其涉及一种持针器及其穿刺手术机器人、手术导航方法、存储介质。
背景技术:
1、影像引导手术的实施过程中,介入医师会根据术前ct影像分析软件来计划目标穿刺位置,并根据超声影像的引导,徒手将穿刺针植入目标靶点进行治疗或取样。在这个过程中,介入医师面临着多个临床痛点问题,比如由于缺乏穿刺针植入体内的末端定位以及医生本身的生理性颤抖等问题所导致的手术过程难以标准的执行;由呼吸和柔性组织所导致的植入误差无法很好地解决,而这个问题在肝部这个唯一没有骨骼包围的区域显得尤为严重,这些痛点严重影响介入医师的操作稳定性、精准性。
技术实现思路
1、本申请实施例提供了一种持针器及其穿刺手术机器人、手术导航方法、存储介质,能够有效保障在影像引导手术过程中,介入医师的操作稳健度。
2、第一方面,本申请实施例提供了一种持针器,其特征在于,包括:
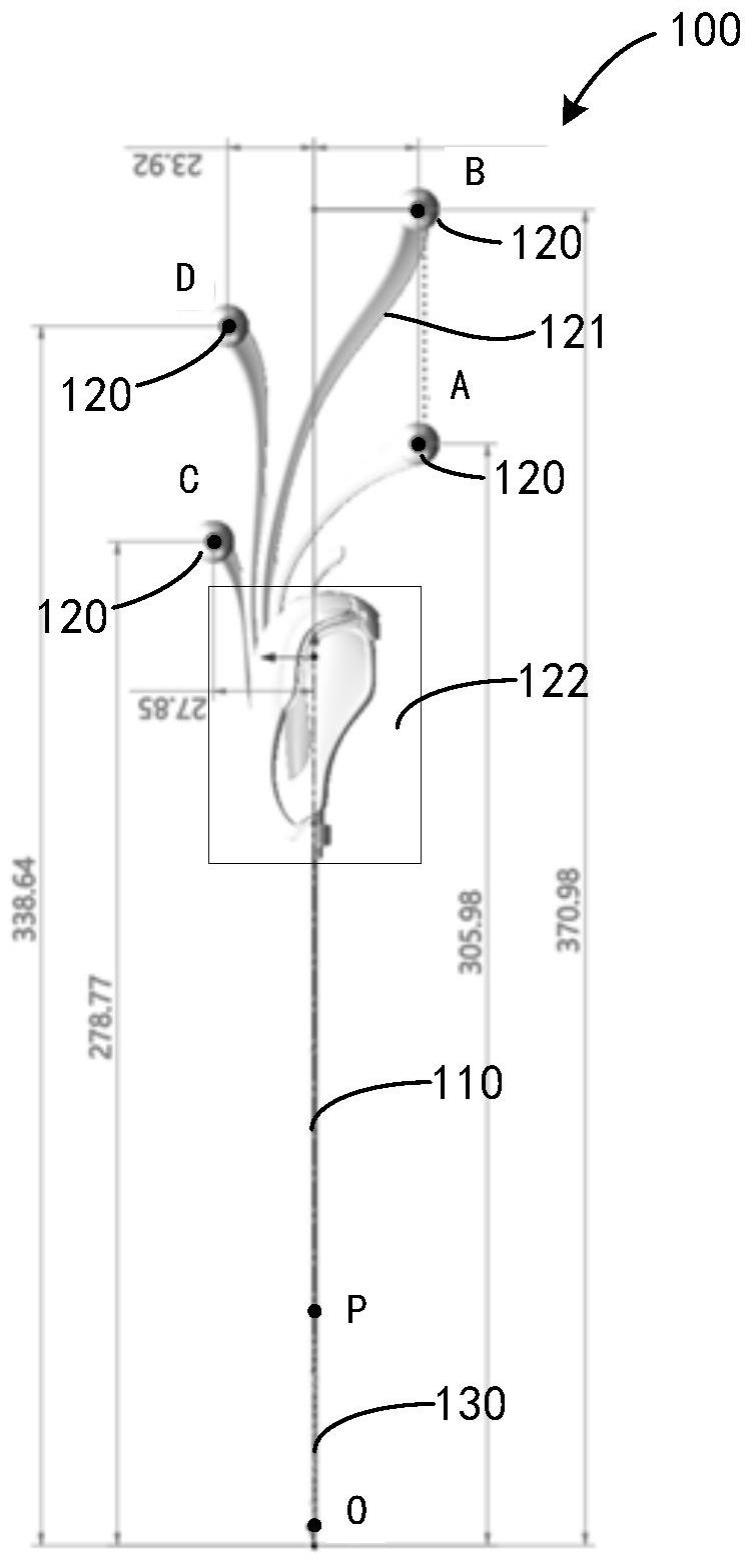
3、支撑杆,所述支撑杆设置有红外灯和光学传感模组;
4、多个反光球,各个所述反光球的一端连接有连接杆,各个所述连接杆通过第一连接件与所述支撑杆的一端可拆卸连接;
5、消融针,所述消融针通过第二连接件与所述支撑杆远离所述反光球的一端可拆卸连接;
6、其中,在所述红外灯照射在若干个所述反光球的情况下,所述光学传感模组用于获取待检测图像,所述待检测图像为若干个所述反光球反射红外光的图像。
7、在一些实施例中,所述第一连接件为弹簧连接件,所述第二连接件为u型卡扣连接件。
8、第二方面,本申请实施例提供了一种穿刺手术机器人,包括如第一方面任意一项实施例所述的持针器。
9、第三方面,本申请实施例提供了一种手术导航方法,应用于第二方面实施例所述的穿刺手术机器人,所述方法包括:
10、获取所述待检测图像和目标对象的术前ct图像,并确定第一坐标系和第二坐标系,所述第一坐标系为所述待检测图像对应的坐标系,所述第二坐标系为所述术前ct图像对应的坐标系;
11、根据所述第一坐标系、所述第二坐标系和预设规则对所述待检测图像和所述术前ct图像进行空间配准处理,得到所述待检测图像对应的病灶空间与术前ct图像空间之间的变换矩阵;
12、根据所述变换矩阵、所述待检测图像和所述术前ct图像进行图像融合处理,得到融合图像;
13、根据所述变换矩阵和所述待检测图像确定当前所述持针器的姿态信息和持针器位置信息;
14、根据所述融合图像、所述姿态信息和所述持针器位置信息生成目标导航图像,基于所述目标导航图像进行手术导航。
15、在一些实施例中,手术导航方法还包括:
16、根据所述术前ct图像确定目标穿刺路径;
17、根据所述姿态信息和持针器位置信息确定参考穿刺路径;
18、计算所述参考穿刺路径与所述目标穿刺路径之间的误差参数,当所述误差参数大于预设阈值,根据所述目标穿刺路径重新调整所述姿态信息和持针器位置信息;
19、根据调整后的姿态信息和调整后的持针器位置信息重新确定所述参考穿刺路径。
20、在一些实施例中,所述待检测图像包括多个标记点信息,各个所述标记点信息为各个所述反光球的中心点的坐标,所述持针器的姿态信息根据以下步骤得到:
21、从多个标记点信息中确定目标标记点信息,所述目标标记点信息包括第一标记点坐标和第二标记点坐标,所述第一标记点坐标对应的标记点与所述第二标记点对应的坐标点之间的连线与所述消融针相互平行;
22、根据所述第一标记点坐标、所述第二标记点坐标和所述变换矩阵确定所述姿态信息。
23、在一些实施例中,所述光学传感模组包括摄像头组件,所述方法还包括:
24、获取目标视角参数,并根据所述目标视角参数调整所述摄像头组件的拍摄角度;
25、通过调整视角后的所述摄像头组件重新获取所述待检测图像。
26、在一些实施例中,在所述确定第一坐标系和第二坐标系之前,所述方法还包括:
27、获取预设的图像预处理规则;
28、根据所述图像预处理规则对所述待检测图像和所述术前ct图像进行图像预处理,得到新的待检测图像和新的术前ct图像。
29、第三方面,本申请实施例提供了一种穿刺手术机器人,包括:存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如第二方面所述的手术导航方法。
30、第四方面,本申请实施例还提供了一种计算机可读存储介质,存储有计算机可执行指令,所述计算机可执行指令用于执行如第二方面所述的手术导航方法。
31、本申请实施例提供了一种持针器及其穿刺手术机器人、手术导航方法、存储介质,持针器包括:支撑杆,所述支撑杆设置有红外灯和光学传感模组;多个反光球,各个所述反光球的一端连接有连接杆,各个所述连接杆通过第一连接件与所述支撑杆的一端可拆卸连接;消融针,所述消融针通过第二连接件与所述支撑杆远离所述反光球的一端可拆卸连接;其中,在所述红外灯照射在若干个所述反光球的情况下,所述光学传感模组用于获取待检测图像,所述待检测图像为若干个所述反光球反射红外光的图像。本申请实施例通过设置有光学传感模组的持针器获取待检测图像,并结合待检测图像与术前ct图像实现定位持针器位置,以便判断并调整持针器姿态信息,并基于姿态信息、待检测图像和术前ct图像生成目标导航图像,基于所述目标导航图像进行手术导航,从而为介入医师提供更强的临场感,能够有效保障在影像引导手术过程中,介入医师的操作稳健度。
技术特征:
1.一种持针器,其特征在于,包括:
2.根据权利要求1所述的持针器,其特征在于,所述第一连接件为弹簧连接件,所述第二连接件为u型卡扣连接件。
3.一种穿刺手术机器人,其特征在于,包括:
4.一种手术导航方法,其特征在于,应用于如权利要求3所述的穿刺手术机器人,所述方法包括:
5.根据权利要求4所述的手术导航方法,其特征在于,所述方法还包括:
6.根据权利要求4所述的手术导航方法,其特征在于,所述待检测图像包括多个标记点信息,各个所述标记点信息为各个所述反光球的中心点的坐标,所述持针器的姿态信息根据以下步骤得到:
7.根据权利要求4所述的手术导航方法,其特征在于,所述光学传感模组包括摄像头组件,所述方法还包括:
8.根据权利要求4所述的手术导航方法,其特征在于,在所述确定第一坐标系和第二坐标系之前,所述方法还包括:
9.一种穿刺手术机器人,包括:存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求4至8中任意一项所述的手术导航方法。
10.一种计算机可读存储介质,存储有计算机可执行指令,所述计算机可执行指令用于执行如权利要求4至8中任意一项所述的手术导航方法。
技术总结
本申请提供了一种持针器及其穿刺手术机器人、手术导航方法、存储介质,持针器包括:设置有红外灯和光学传感模组的支撑杆;多个反光球,各个反光球的一端连接有连接杆,各个连接杆通过第一连接件与支撑杆的一端可拆卸连接;消融针,消融针通过第二连接件与支撑杆远离反光球的一端可拆卸连接;在红外灯照射在若干个反光球的情况下,光学传感模组用于获取待检测图像,待检测图像为若干个反光球反射红外光的图像。本申请通过设置有光学传感模组的持针器获取待检测图像,结合待检测图像与术前CT图像生成目标导航图像,基于目标导航图像进行手术导航,从而为介入医师提供更强的临场感,能够有效保障在影像引导手术过程中,介入医师的操作稳健度。
技术研发人员:王澄,李迟迟,朱海东,滕皋军,陆骊工,陈晓东,罗皓
受保护的技术使用者:珠海横乐医学科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!