一种3D手术导航标尺及导航配准方法与流程
本发明涉及医疗设备领域,具体地,涉及一种3d手术导航标尺及导航配准方法。
背景技术:
1、在手术导航过程中,为了实现影像空间与手术空间的精确匹配,医生需要进行准确的配准和定位,从而进行精确的手术操作。现有的标尺和定位器通常需要分开使用,在手术过程中不得不反复拆装。这种重复拆装可能导致精度损失、手术过程繁琐、病人出血时间延长以及术中感染风险增加等问题。此外,在算法过程中对工具标定数据的转换也可能产生误差。
2、现有技术的缺陷主要包括以下几点:
3、1、标尺和定位器需分开使用,使手术操作变得繁琐;
4、2、重复安装可能导致精度损失;
5、3、手术时间较长,增加病人出血、感染等风险;
6、4、灭菌工艺复杂;
7、5、在配准过程中,标定工具标定的数据转换可能产生误差,从而影响手术导航的精确性。
技术实现思路
1、本发明的目的是提供一种3d手术导航标尺及导航配准方法,该3d手术导航标尺将标尺与定位器的功能整合于一体,既可作为标尺使用,同时也可作为定位器使用,简化了手术操作过程,缩短了手术时间,降低了患者出血和感染风险。
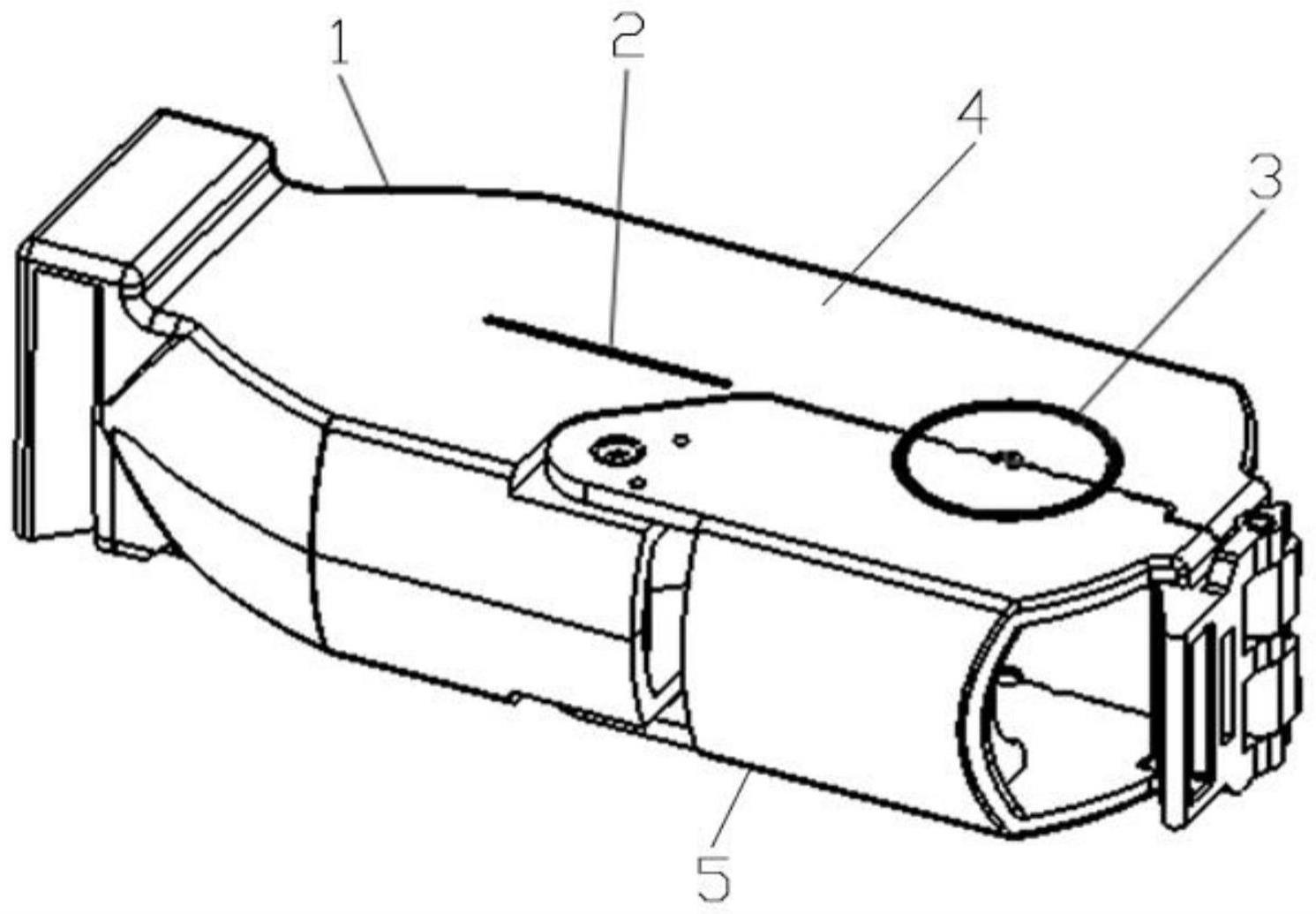
2、为了实现上述目的,本发明一方面提供了一种3d手术导航标尺,包括标尺本体;所述标尺本体包括对称且平行设置的上侧面和下侧面,所述上侧面上设置有线段部和第一圆环部,所述线段部沿着所述第一圆环部的径向和标尺本体的长度方向延伸;所述下侧面上设置有与所述第一圆环部同轴的第二圆环部,所述第一圆环部的直径小于第二圆环部;所述线段部、第一圆环部和第二圆环部能够在医学成像设备下显影,所述标尺本体不能在医学成像设备下显影;所述标尺本体的端部固接于机械臂的末端,所述标尺本体用作手术器械的定位器。
3、优选地,所述线段部位于第一圆环部的外部,且与第一圆环部不相交。
4、优选地,所述标尺本体上设置有用于镶嵌所述线段部、第一圆环部和第二圆环部的沟槽。
5、优选地,所述线段部、第一圆环部和第二圆环部被分别或整体的设置在预制件上,所述预制件可拆卸的安装于标尺本体上。
6、优选地,所述手术器械被定位于所述第一圆环部和第二圆环部的圆心处。
7、优选地,所述线段部、第一圆环部和第二圆环部为整体构件,或者由多个分体构件组成。
8、本发明另一方面提供了一种利用了所述3d手术导航标尺的导航配准方法,包括以下步骤:
9、通过机械臂将3d手术导航标尺置于手术对象上方,对手术对象及3d手术导航标尺进行三维医学成像扫描,获取手术部位和3d手术导航标尺的三维图像;
10、在获取的所述三维图像中检测和标定双圆环特征点;
11、建立双圆环坐标系,计算图像坐标系到双圆环坐标系的转换矩阵mi2d;
12、读取所述双圆环特征点在机械臂坐标系下的坐标;
13、获取双圆环坐标系到机械臂坐标系的转换矩阵md2r;
14、获取机械臂坐标系到患者坐标系的转换矩阵mr2p;
15、计算图像坐标系到患者坐标系的转换矩阵mi2p;
16、根据所述图像坐标系到患者坐标系的转换矩阵mi2p,将手术器械在图像坐标系中的位置实时转换为患者坐标系中的位置。
17、优选地,所述双圆环特征点包括:第一圆环部的圆心、第二圆环部的圆心和线段部的中心。
18、优选地,根据下式计算图像坐标系到患者坐标系的转换矩阵mi2p:mi2p=mr2p*md2r*mi2d。
19、优选地,所述建立双圆环坐标系的步骤包括:
20、以第一圆环部的圆心为原点;
21、以第一圆环部的圆心和线段部的中心的连线为y轴;
22、以第二圆环部的圆心到第一圆环部的圆心的连线为x轴;
23、以x轴和y轴的叉乘为z轴。
24、根据上述技术方案,本发明具有以下优点:
25、1、利用双圆环特征作为3d手术导航标尺的方案,将标尺与定位器的功能整合于一体,简化了手术操作过程,缩短了手术时间,降低了患者出血和感染风险;2、采用创新的双圆环一体化导航配准法,结合精确的坐标系转换方法,有效提高了手术导航的准确性和精确性,减小了因数据转换误差带来的影响;3、通过整合标尺和定位器功能,简化了灭菌工艺,提高了手术室的效率。
26、本发明的其他特征和优点将在随后的具体实施方式部分予以详细说明。
技术特征:
1.一种3d手术导航标尺,包括标尺本体(1),其特征在于:
2.根据权利要求1所述的3d手术导航标尺,其特征在于,所述线段部(2)位于第一圆环部(3)的外部,且与第一圆环部(3)不相交。
3.根据权利要求1或2所述的3d手术导航标尺,其特征在于,所述标尺本体(1)上设置有用于镶嵌所述线段部(2)、第一圆环部(3)和第二圆环部(7)的沟槽。
4.根据权利要求1或2所述的3d手术导航标尺,其特征在于,所述线段部(2)、第一圆环部(3)和第二圆环部(7)被分别或整体的设置在预制件上,所述预制件可拆卸的安装于标尺本体(1)上。
5.根据权利要求1或2所述的3d手术导航标尺,其特征在于,所述手术器械被定位于所述第一圆环部(3)和第二圆环部(7)的圆心处。
6.根据权利要求1或2所述的3d手术导航标尺,其特征在于,所述线段部(2)、第一圆环部(3)和第二圆环部(7)为整体构件,或者由多个分体构件组成。
7.一种利用了权利要求1-6中的任意一项所述的3d手术导航标尺的导航配准方法,其特征在于,包括以下步骤:
8.根据权利要求7所述的导航配准方法,其特征在于,所述双圆环特征点包括:第一圆环部的圆心、第二圆环部的圆心和线段部的中心。
9.根据权利要求7所述的导航配准方法,其特征在于,根据下式计算图像坐标系到患者坐标系的转换矩阵mi2p:
10.根据权利要求8所述的导航配准方法,其特征在于,所述建立双圆环坐标系的步骤包括:
技术总结
本发明公开了一种3D手术导航标尺,包括标尺本体,该标尺本体包括对称且平行设置的上侧面和下侧面,上侧面上设置有线段部和第一圆环部,线段部沿着第一圆环部的径向和标尺本体的长度方向延伸;下侧面上设置有与第一圆环部同轴的第二圆环部,第一圆环部的直径小于第二圆环部;线段部、第一圆环部和第二圆环部能够在医学成像设备下显影,标尺本体不能在医学成像设备下显影;标尺本体的端部固接于机械臂的末端,标尺本体用作手术器械的定位器。该3D手术导航标尺将标尺与定位器的功能整合于一体,简化了手术操作过程,缩短了手术时间,降低了患者出血和感染风险。
技术研发人员:韩佳奇,李吉,曹宇轩,杨标,张坚
受保护的技术使用者:苏州铸正机器人有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!