在高水平PEEP下调节基础流量的方法、控制装置和存储介质与流程
本公开涉及呼吸机,具体而言,涉及一种用于在高水平peep(呼吸末正压)下调节基础流量的方法、控制装置和计算机可读存储介质。
背景技术:
1、呼吸机的bipap模式是在高低压peep(呼气末正压)水平上都可以实现自主呼吸的通气模式。在呼气阶段,在高低水平peep上可以由呼气阀、涡轮、流量阀等装置根据设置的基础流量进行调节,有利于排出管路内的co2气体,提供需要的氧气浓度,辅助触发通气等作用。在高水平的呼气阶段,呼气阀一方面要保证高水平的peep压力,另一方面需要打开一定的幅度,使呼吸管路中的基础流量保持通畅。根据呼气阀的内部结构,在高peep压力并且开启一定的基础流量的情况下,呼气膜片有可能会产生一定幅度的抖动,造成基础流量不稳定,出现振荡现象,对监测和调节过程中带来噪声。在其他模式下,当较高水平的peep出现时,也会出现类似的情况。目前的呼吸机没有采取相应的措施来解决在高水平peep下的这一问题。
2、此外,在调节基础流量时,当出现较大的干扰时,相应的基础流量调节会波动较大。如果在高水平peep下直接关闭呼气阀,无基础流量,这样会给病人的通气过程带来一定的负作用。
3、因此,基于以上原因,需要一种用于高水平peep的基础流量的调节方法,以避免在高peep压力下基础流量调节中出现的较大波动。
技术实现思路
1、本公开提供一种呼吸机在高水平peep下调节基础流量的方法和控制装置,以解决上述一个或多个技术问题。
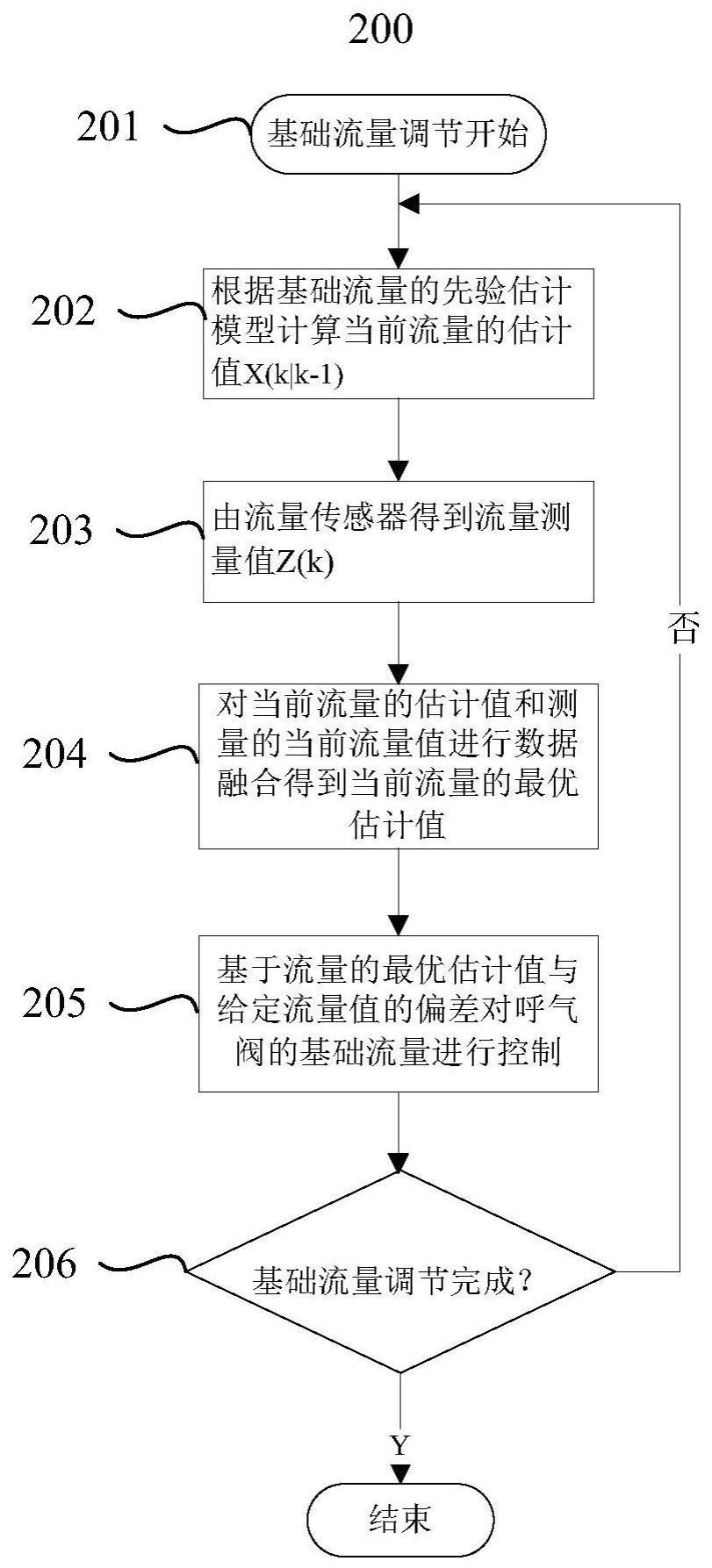
2、根据第一方面,本公开的实施例提供了一种在高水平peep下调节基础流量的方法,其包括基于基础流量的先验估计模型计算当前流量的估计值;测量当前流量值;对当前流量的估计值和测量的当前流量值进行数据融合得到流量的最优估计值;根据流量的最优估计值与设定的流量值的偏差控制基础流量的调节。
3、本公开的实施例考虑了高水平peep下由于呼吸膜片的抖动带来的基础流量的不稳定的状况,在对基础流量进行控制时,首先计算流量的最优估计值,而不是直接使用测量的流量值,从而避免了由于呼吸膜片抖动对于基础流量控制的影响。
4、可选的,根据本公开的第一方面的实施例,所述基础流量控制的状态方程为
5、x(k)=ax(k-1)+bu(k)+w(k)
6、其中x(k)为k时刻的基础流量值;a为系统状态矩阵,其表示当前时刻的流量与上一时刻的流量之间的关系;u(k)为施加在呼气阀上的控制量;控制矩阵b为与呼气阀的相关的控制矩阵,其表示控制量与流量变化之间的对应关系;w(k)为过程噪声;根据所述控制的状态方程得到所述基础流量的先验估计模型为
7、x(k|k-1)=ax(k-1|k-1)+bu(k),
8、其中x(k|k-1)表示用k-1时刻的流量的最优估计值预测k时刻的流量的估计值;x(k-1|k-1)为k-1时刻的流量的最优估计值。
9、本公开的上述实施例基于基础流量控制的方式建立了基础流量的先验估计模型,以便于计算基础流量的估计值。
10、可选的,系统状态矩阵a表示当前时刻的流量与上一时刻的流量之间的线性关系;控制矩阵b表示呼气阀的电压的变化与流量变化的关系。
11、可选的,根据本公开的第一方面的实施例,对当前流量的估计值和测量的当前流量值进行数据融合得到流量的最优估计值是采用卡尔曼滤波法。
12、可选的,根据本公开的第一方面的实施例,在高水平peep下,过程噪声w(k)包括由于呼吸膜片振荡对流量的稳定性产生的干扰而引起的噪声,该过程噪声的协方差为q,当peep压力升高时,增加协方差q的系数。
13、可选的,根据本公开的第一方面的实施例,其中所述协方差q通过以下等式计算:
14、q=q*q(t)
15、q(t)=α1*δpeep
16、其中,q(t)是与peep压力变化相关的系数,δpeep为当前设置的peep压力相对于通气时默认的peep压力设置值的偏差,α1为peep压力差的修正因子,以保证0<q(t)≤1。
17、可选的,根据本公开的第一方面的实施例,其中所述对当前流量的估计值和测量的当前流量值进行数据融合得到流量的最优估计值包括根据协方差计算模型来计算流量误差的协方差;计算卡尔曼增益系数;根据当前流量的估计值、测量的当前流量值和卡尔曼增益系数计算流量的最优估计值,其中卡尔曼增益系数其中p(k|k-1)为状态x(k-1|k-1)的误差协方差,h为测量系统参数,r为测量误差的协方差,根据温度、湿度、海拔高度的变化、零点电压的变化中的一种或者多种对r进行实时修正。
18、可选的,根据本公开的第一方面的实施例,其中r通过以下等式计算:
19、r=r*ρ(t)
20、ρ(t)=λ1*δtemp+λ2*δalt+λ3*δvol+λ4*δrh
21、其中ρ(t)是r的修正系数,δtemp为当前温度相对于标准环境温度的变化量;δalt为当前海拔高度相对于标准海拔高度的变化量;δvol为流量传感器当前的零点电压相对于标准环境下的零点电压的变化量;δrh为当前相对湿度相对于标准环境湿度的变化量;λ1、λ2、λ3、λ4为相应的环境修正因子,保证0<ρ(t)≤1。
22、可选的,根据本公开的第一方面的实施例,其中所述根据流量的最优估计值与设定的流量值的偏差控制基础流量的调节包括使用pi控制对基础流量进行调节。
23、根据第二方面,本公开的实施例提供了一种在高水平peep下调节基础流量的控制装置,其包括至少一个处理器和至少一个存储装置,所述存储装置存储有程序代码,其特征在于,所述程序代码适于由所述处理器加载并运行以执行上述任一项所述的方法。
24、根据第三方面,本公开的实施例提供了一种计算机可读存储介质,其上存储有计算机指令,其中,当所述计算机指令被处理器执行时实现上述任一项所述的用于在高水平peep下调节基础流量的方法。
25、上述实施例考虑了呼吸机工作过程中在高水平peep下呼气阀膜片的振荡所引起的噪声,根据环境因素实时修正模型和计算中的误差,从而保证数据融合过程的快速性和稳定性,提高了基础流速的控制精度和准确性。
26、实施本公开的任一装置并不一定需要同时达到以上所述的所有优点。本公开的其它特征和优点将在随后的说明书实施例中阐述,并且,部分地从说明书实施例中变得显而易见,或者通过实施本公开而了解。本公开实施例的目的和优点可通过在说明书、权利要求书以及附图中所指出的结构来实现和获得。
技术特征:
1.一种在高水平peep下调节基础流量的方法,其包括:
2.根据权利要求1所述的在高水平peep下调节基础流量的方法,其中所述基础流量控制的状态方程为
3.根据权利要求2所述的在高水平peep下调节基础流量的方法,其中对当前流量的估计值和测量的当前流量值进行数据融合得到流量的最优估计值是采用卡尔曼滤波法。
4.根据权利要求2或3所述的在高水平peep下调节基础流量的方法,其中在高水平peep下,过程噪声w(k)包括由于呼吸膜片振荡对流量的稳定性产生的干扰而引起的噪声,该过程噪声的协方差为q,其大小由噪声的幅频特性确定;当peep压力升高时,增加协方差q的系数。
5.根据权利要求4所述的在高水平peep下调节基础流量的方法,其中所述协方差q通过以下等式计算
6.根据权利要求3所述的在高水平peep下调节基础流量的方法,其中所述对当前流量的估计值和测量的当前流量值进行数据融合得到流量的最优估计值包括根据协方差计算模型来计算流量误差的协方差;计算卡尔曼增益系数;根据当前流量的估计值、测量的当前流量值和卡尔曼增益系数计算流量的最优估计值,其中卡尔曼增益系数其中p(k|k-1)为状态x(k-1|k-1)的误差协方差,h为测量系统参数,r为测量误差的协方差,根据温度、湿度、海拔高度的变化、零点电压的变化中的一种或者多种对r进行实时修正。
7.根据权利要求6所述的在高水平peep下调节基础流量的方法,其中r通过以下等式计算:r=r*ρ(t)
8.根据权利要求1所述的在高水平peep下调节基础流量的方法,其中所述根据流量的最优估计值与设定的流量值的偏差控制基础流量的调节包括使用pi控制对基础流量进行调节。
9.一种在高水平peep下调节基础流量的控制装置,包括至少一个处理器和至少一个存储装置,所述存储装置存储有程序代码,其特征在于,所述程序代码适于由所述处理器加载并运行以执行权利要求1至8中任一项所述的方法。
10.一种计算机可读存储介质,其上存储有计算机指令,其中,当所述计算机指令被处理器执行时实现如权利要求1-8中任一项所述的在高水平peep下调节基础流量的方法。
技术总结
本公开的实施例提供了一种在高水平PEEP下调节基础流量的方法、控制装置和计算机可读存储介质,其中该方法包括基于基础流量的先验估计模型计算当前流量的估计值;测量当前流量值;对当前流量的估计值和测量的当前流量值进行数据融合得到流量的最优估计值;根据流量的最优估计值与设定的流量值的偏差控制基础流量的调节。本公开的实施例考虑了呼吸机工作过程中在高水平PEEP下呼气阀膜片的振荡所引起的噪声,根据环境因素实时修正模型和计算中的误差,从而保证数据融合过程的快速性和稳定性,提高了基础流速的控制精度和准确性。
技术研发人员:陈庚,李文峰
受保护的技术使用者:北京瑞承天启医疗科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!