一种基于超声图像的机械臂自适应扫查颈动脉方法及系统
本申请属于医疗机器人,具体涉及一种基于超声图像的机械臂自适应扫查颈动脉方法及系统。
背景技术:
1、颈动脉扫查是一项比较重要的检查方式,颈动脉扫查能够查看出全身动脉硬化的程度以及脑供血的情况,来判断自动的治疗方案。主要通过看到颈动脉内的斑块以及血液的流速情况,不仅能够诊断粥样动脉硬化性疾病,而且对心血管以及脑血管疾病也具有一定的评估。另外,医生还需要根据颈动脉检查的结果来确诊治疗方案,达到缓解病情的目的,因此该项检查在医疗检测领域非常重要。
2、现有医疗领域的机械臂应用多应用于护理、理疗和码垛等功能,实现的多为简单的开环路径引导功能,需要事先按照深度相机或者激光雷达甚至是固定的位置方向进行运动,该方法并不适用于复杂、情况多变的目标路径规划,颈动脉的扫查路径便是这样一个多向性、因人而异的路径规划任务。
3、为此,本申请提供一种基于超声图像的机械臂自适应扫查颈动脉方法及系统以解决上述问题。
技术实现思路
1、本申请实施例的目的是提供一种基于超声图像的机械臂自适应扫查颈动脉方法及系统,其基于现有的、方便携带式的掌上超声设备进行颈动脉的超声检查,检查全程通过机械臂来代替专业医生的作业,实现自动寻找颈动脉位置,借助末端压力传感器的反馈信息,自适应的调整到合适且舒适的力度范围,并且根据超声图像反馈自适应的调整打图路径使得超声成像有效区域最大化,从而大大降低检查设备的使用门槛,从而可以解决背景技术中涉及的至少一个技术问题。
2、为了解决上述技术问题,本申请是这样实现的:
3、本申请实施例提供了一种基于超声图像的机械臂自适应扫查颈动脉方法,包括:
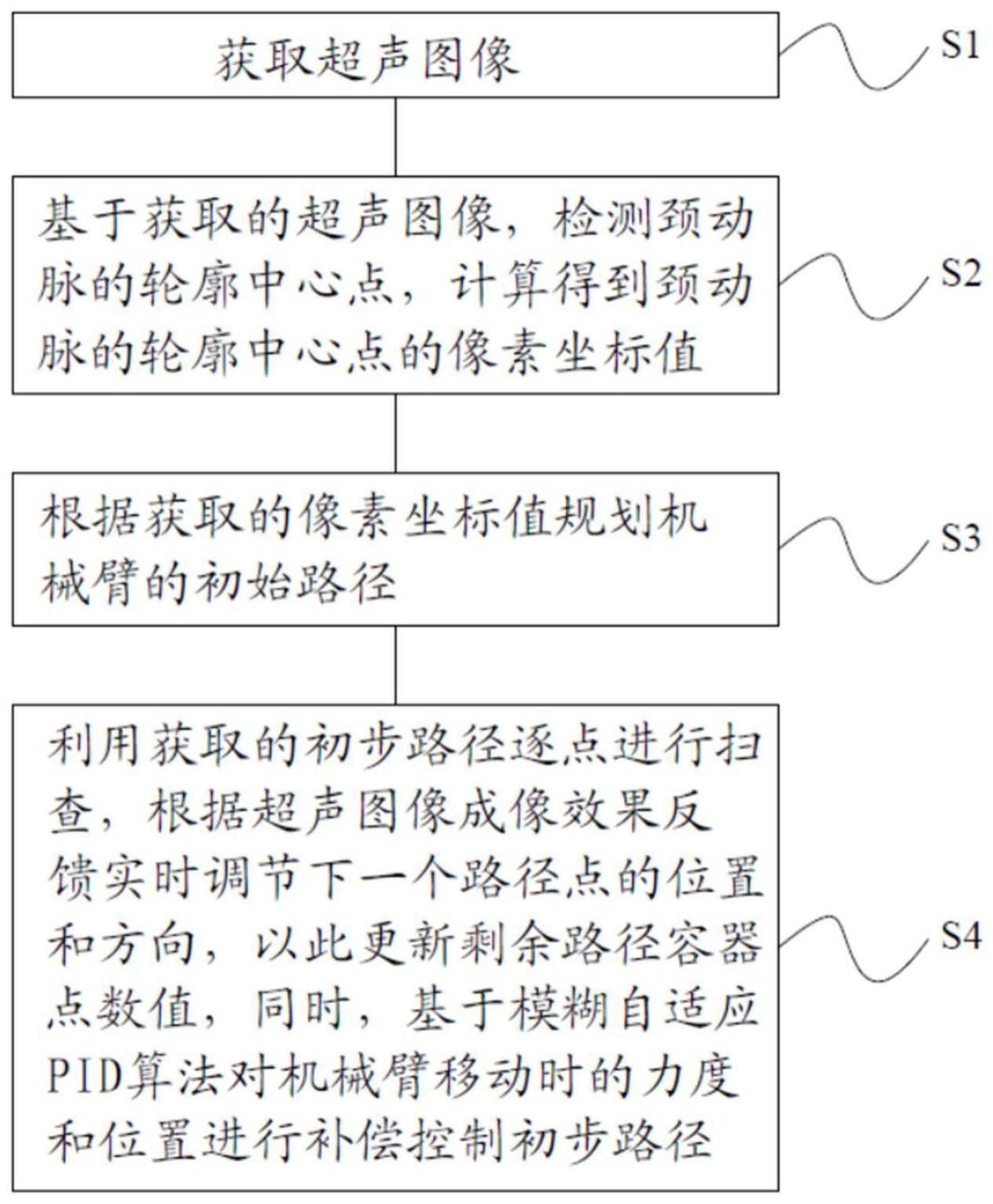
4、步骤s1:获取超声图像;
5、步骤s2:基于获取的超声图像,检测颈动脉的轮廓中心点,计算得到颈动脉的轮廓中心点的像素坐标值;
6、步骤s3:根据获取的像素坐标值规划机械臂的初步路径;
7、步骤s4:利用规划好的初步路径逐点步进扫查,根据超声图像成像效果反馈实时调节下一个路径点的位置和方向,以此更新剩余路径容器点数值,同时基于模糊自适应pid算法对机械臂移动时的力度和位置进行补偿控制。
8、可选的,在步骤s1中,所述获取超声图像,包括:
9、机械臂按照横切路径进行扫查;
10、利用机械臂末端的超声探头对人体颈部进行成像,得到左右视野的当前探头位置的超声图像;
11、在得到左右视野的超声图像之后,还包括:
12、基于三维测量原理,计算出左视野图像中每个像素点的三维信息,得到三维信息矩阵;
13、构建deeplabv3+语义分割网络;
14、将超声图像输入deeplabv3+语义分割网络,实现对人体的精确分割,并输出分割结果;
15、基于分割结果,获取属于人体部分的像素点坐标;
16、基于获取的像素点坐标构建掩码,利用掩码在三维信息矩阵中进行索引,获得人体的各点空间坐标及法向量;
17、基于获得的空间坐标及法向量构建点云,实现对人体的三维重建。
18、可选的,在步骤s2中,所述基于获取的超声图像,检测颈动脉的轮廓中心点,计算得到颈动脉的轮廓中心点的像素坐标值,包括:
19、基于获取的超声图像,计算超声图像轮廓的空间矩、中心矩和归一化中心矩阵,检测得到颈部超声图像;
20、根据零阶矩和一阶矩计算,分别获取颈动脉的轮廓中心点(cx,cy)的像素坐标。
21、可选的,在步骤s3中,所述根据获取的像素坐标值规划机械臂的初步路径,包括:
22、步骤s31:判断轮廓中心点的横坐标cx位于124-132的区间内,若是,则执行步骤s32;
23、步骤s32:记录下当前的路径点的遍历序号i,传递给路径规划器,规划机械臂的纵切路径,根据当前记录序号i,按照像素坐标下的插值法得到纵切路径的起始坐标值,并以此向上规划路径:
24、
25、ystart2=ystart1
26、其中(xstar,ystart)为横切路径起始位置,(xstart2,ystart2)为纵切路径起始位置,step为总步进长度。
27、可选的,在步骤s4中,所述利用规划好的初步路径逐点步进扫查,根据超声图像成像效果反馈实时调节下一个路径点的位置和方向,以此更新剩余路径容器点数值,包括:
28、利用得到的纵切初始路径点(xstar,ystar)进行初步的路径规划,按照一定角度θ,向上偏转步进得到机械臂路径点容器,按照此容器值来运动,起始步进点坐标如下所示:
29、
30、其中,(xi,yi)为纵切路径第i个点的像素坐标,θ为相对于x轴的偏角。
31、可选的,在步骤s4中,模糊自适应pid算法由下式表示:
32、
33、δu(k)=kp(e(k)-e(k-1))+kie(k)+kd(e(k)-2e(k-1)+e(k-2))
34、其中,e(k)为误差;δu(k)为误差变化率;
35、补偿控制由下式表示:
36、qr=qd-τ/kp1
37、其中,kp1为直接力反馈参数,取0.001m;τ为控制率系数。
38、本申请实施例还提供了一种用于执行所述的方法的基于超声图像的机械臂自适应扫查颈动脉的系统,该系统包括:
39、超声图像获取模块,用于获取超声图像;
40、像素坐标获取模块,用于基于获取的超声图像,检测颈动脉的轮廓中心点,计算得到颈动脉的轮廓中心点的像素坐标值;
41、初步路径规划模块,用于根据获取的像素坐标值规划机械臂的初步路径;
42、移动控制模块,用于利用规划好的初步路径逐点步进扫查,根据超声图像成像效果反馈实时调节下一个路径点的位置和方向,以此更新剩余路径容器点数值,同时基于模糊自适应pid算法对机械臂移动时的力度和位置进行补偿控制。
43、本申请的有益效果如下:
44、1、实现了颈动脉自主诊断,对于检测人员的技术要求很低,采用机械臂根据信号自主智能找寻颈动脉位置,实时调整,适于不同人群体验,泛化性较强;
45、2、打破了传统的专业医师检查的门槛,对于小型医院、日常的身体病变筛查无疑是一大福音。
技术特征:
1.一种基于超声图像的机械臂自适应扫查颈动脉方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,在步骤s1中,所述获取超声图像,包括:
3.根据权利要求2所述的方法,其特征在于,在步骤s2中,所述基于获取的超声图像,检测颈动脉的轮廓中心点,计算得到颈动脉的轮廓中心点的像素坐标值,包括:
4.根据权利要求3所述的方法,其特征在于,在步骤s3中,所述根据获取的像素坐标值规划机械臂的初步路径,包括:
5.根据权利要求4所述的方法,其特征在于,在步骤s4中,所述利用规划好的初步路径逐点步进扫查,根据超声图像成像效果反馈实时调节下一个路径点的位置和方向,以此更新剩余路径容器点数值,包括:
6.根据权利要求5所述的方法,其特征在于,在步骤s4中,模糊自适应pid算法由下式表示:
7.一种用于执行权利要求1-6任意一项所述的方法的基于超声图像的机械臂自适应扫查颈动脉的系统,其特征在于,该系统包括:
技术总结
本申请公开了一种基于超声图像的机械臂自适应扫查颈动脉方法及系统,属于医疗机器人技术领域。该方法包括:获取超声图像;基于获取的超声图像,检测颈动脉的轮廓中心点,计算得到颈动脉的轮廓中心点的像素坐标;利用规划好的初步路径逐点步进扫查,根据超声图像成像效果反馈实时调节下一个路径点的位置和方向,以此更新剩余路径容器点数值,同时基于模糊自适应PID算法对机械臂移动时的力度和位置进行补偿控制。本申请有益效果如下:实现了颈动脉自主诊断,对于检测人员的技术要求很低,采用机械臂根据信号自主智能找寻颈动脉位置,实时调整,适于不同人群体验,泛化性较强。
技术研发人员:江未来,肖振,郑成宏,王耀南,蔡田青,吴俊,罗坤
受保护的技术使用者:湖南大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!