一种智能骨科手术系统的制作方法
本发明涉及骨科手术领域,具体为一种智能骨科手术系统。
背景技术:
1、骨科手术,是涉及肌肉骨骼系统疾病的外科分支,骨科医生使用手术和非手术手段来治疗肌肉骨骼创伤、脊柱疾病、运动损伤、退行性疾病、感染、肿瘤和先天性疾病。
2、目前,随着科技的发展,智能化的设备代替人工处理事务的领域越来越多,并且伴随着通信技术的发展,多模块、多设备的智能化系统逐渐出现在人们的视野,目前手术系统中存在术后创伤大,恢复机体功能慢的问题,急需一种协调的控制创伤与恢复效率快的完备手术系统。
3、现有的骨科手术有骨钻技术,采用机械臂的方式进行骨科手术,但是在进行手术的时候,大多需要医护人员进行协助操作,并且在对手术时候通过骨钻进行手术时候采集的图像信息不全面,对于手术部位的图像不方便全面进行采集,从而导致部分手部盲区的存在,影响手术的准确性,并且在进行操作的时候,不方便进行远程操作,从而为手术带来不便。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了一种智能骨科手术系统,解决了现有的骨科手术有骨钻技术,采用机械臂的方式进行骨科手术,但是在进行手术的时候,大多需要医护人员进行协助操作,并且在对手术时候通过骨钻进行手术时候采集的图像信息不全面,对于手术部位的图像不方便全面进行采集,从而导致部分手部盲区的存在,影响手术的准确性,并且在进行操作的时候,不方便进行远程操作,从而为手术带来不便的问题。
3、(二)技术方案
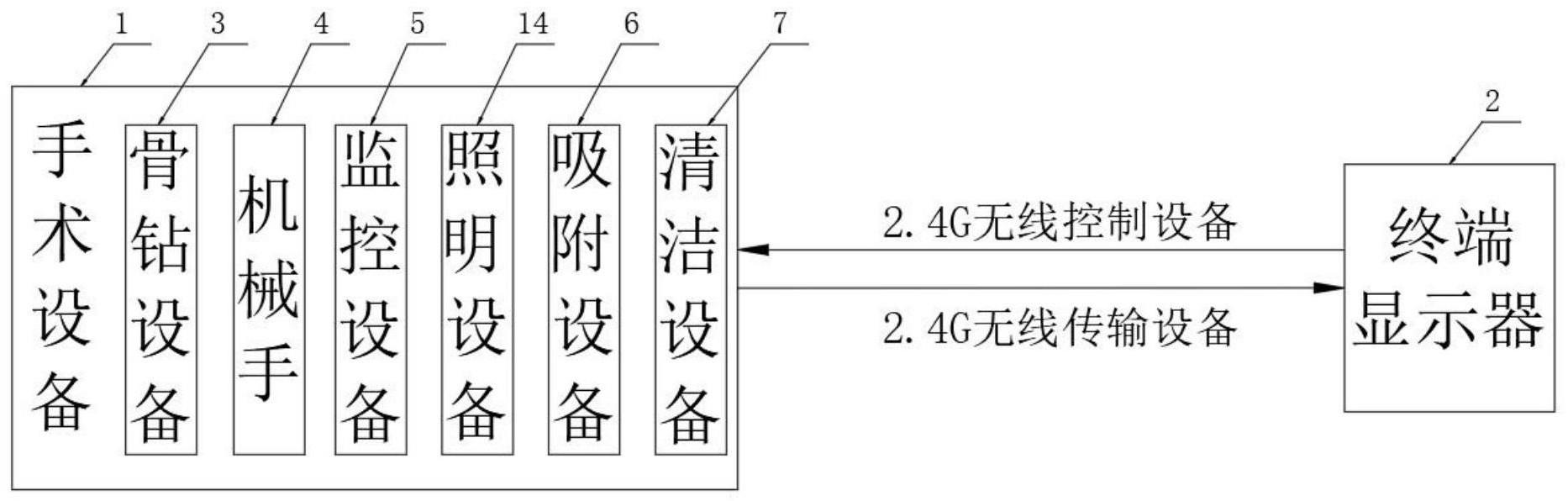
4、为实现以上目的,本发明通过以下技术方案予以实现:一种智能骨科手术系统,包括手术设备和终端设备,所述手术设备通过2.4g无线传输设备与终端设备进行连接,所述终端设备通过2.4g无线控制设备与手术设备进行连接;
5、所述手术设备包括骨钻设备、机械手、监控设备、多个照明设备、吸附设备和清洁设备,所述骨钻设备的顶面与机械手的输出端固定连接。
6、优选的,所述手术设备包括设备主机,所述设备主机右面的上侧固定连接有支撑架,所述支撑架的底面与机械手的上端固定连接,所述支撑架底面位于机械手的左右两侧均固定连接有电动伸缩杆,两个所述电动伸缩杆的底面均固定连接有定位壳,多个所述照明设备的相反一面均与定位壳的内壁固定连接。
7、进一步,所述监控设备包括多个微型摄像头,所述定位壳的内壁开设有多个第一凹槽,多个所述微型摄像头的两面均通过转轴与第一凹槽内壁的两侧转动连接,多个所述微型摄像头的相反一面均固定连接有扇形蜗轮,多个所述扇形蜗轮的相反一面均啮合连接有蜗杆,多个所述蜗杆的上下两端分别与第一凹槽内壁的上下两侧转动连接,所述定位壳的底面开设有多个第一空腔,多个所述第一空腔的内壁均固定连接有驱动马达,多个所述驱动马达的输出端均贯穿第一空腔内壁的上侧至第一凹槽的内部,多个所述驱动马达的输出端均与蜗杆的下端固定连接。
8、更进一步,所述清洁设备包括弧形刮块,所述定位壳的内壁固定连接有透明环形保护罩,所述弧形刮块的内壁与透明环形保护罩的内壁相接触,所述弧形刮块的左面开设有杂质流动槽,所述定位壳内壁的下侧固定连接有集料壳。
9、更加进一步,所述集料壳的内壁开设有第一环形滑槽,所述第一环形滑槽的内壁通过弧形滑块与弧形刮块右面的下侧滑动连接。
10、更加进一步,所述定位壳内壁的上侧开设有第二凹槽,所述第二凹槽的内部设置有外齿环,所述外齿环内壁的左侧与弧形刮块左面的上侧固定连接,所述外齿环的四周均啮合连接有驱动齿轮,多个所述驱动齿轮的底面均固定连接有连接转杆,所述定位壳的四开设有第二空腔,多个所述连接转杆的下端均贯穿第二凹槽内壁的下侧至第二空腔的内部,多个所述连接转杆的下端均固定连接有传动链轮,多个所述传动链轮的四周共同通过链条转动连接,所述定位壳的左面开设有第三空腔,所述第三空腔的内壁固定连接有伺服电机,所述伺服电机的输出端贯穿第三空腔内壁的上侧至第二空腔的内部,所述伺服电机的输出端与左侧的传动链轮的底面固定连接。
11、更加进一步,所述第二凹槽内壁的上下两侧均开设有第二环形滑槽,两个所述第二环形滑槽的内壁均通过环形滑块分别与外齿环的上下两面滑动连接。
12、更加进一步,所述集料壳内壁左侧的下方固定连接有排污软管,所述排污软管的左端贯穿定位壳内壁的左侧至其左面,所述设备主机的底面固定连接有移动座,所述移动座顶面的右侧固定连接有集料箱,所述移动座的左端与集料箱的右面固定连接。
13、更加进一步,所述吸附设备包括多个吸盘,多个所述吸盘的顶面均与定位壳的底面固定连接,多个所述吸盘的相对一面均共同固定连接有连通管,所述定位壳顶面的左侧固定连接有抽气泵,所述抽气泵的输出端固定连接有气体软管,所述气体软管的下端与左侧的吸盘的左面固定连接。
14、(三)有益效果
15、本发明提供了一种智能骨科手术系统。具备以下有益效果:
16、1、本发明在定位圈中设置有多个微型摄像头,从而使得骨钻设备在进行手术的时候,可以将手术的位置进行全面的图像采集,从而避免手术盲区的存在,并且将数据传输至终端控制器上,通过终端方便控制设备的运作,从而为手术带来便捷,并且增加了手术的准确性。
17、2、本发明通过设置多个微型摄像头,可以对手术位置进行全面监测,能够将手术的全面操作传输至终端设备中,从而避免出现操作盲区,增加了手术的全面性,减少手术存在的风险,并且在使用的时候,通过扇形蜗轮和蜗杆方便对微型摄像头监测的角度进行调节,从而更加全面地对手术进行监测。
18、3、本发明在透明环形保护罩的作用下,对微型摄像头和照明设备进行防护,避免微型摄像头和照明设备受到损坏,并且在弧形刮块的作用下,方便对透明环形保护罩的表面进行清洁,从而避免透明环形保护罩表面存在杂质,影响微型摄像头采集图像的准确性。
19、4、本发明通过设置多个吸盘,可以将定位壳稳定地吸附在手术的附近,从而使得定位壳能够限制手术的位置,避免骨钻设备操作的位置出现偏差,从而导致其他位置受损,避免手术存在的安全隐患。
技术特征:
1.一种智能骨科手术系统,包括手术设备(1)和终端设备(2),其特征在于:所述手术设备(1)通过2.4g无线传输设备与终端设备(2)进行连接,所述终端设备(2)通过2.4g无线控制设备与手术设备(1)进行连接;
2.根据权利要求1所述的一种智能骨科手术系统,其特征在于:所述手术设备(1)包括设备主机(8),所述设备主机(8)右面的上侧固定连接有支撑架(9),所述支撑架(9)的底面与机械手(4)的上端固定连接,所述支撑架(9)底面位于机械手(4)的左右两侧均固定连接有电动伸缩杆(10),两个所述电动伸缩杆(10)的底面均固定连接有定位壳(11),多个所述照明设备(14)的相反一面均与定位壳(11)的内壁固定连接。
3.根据权利要求2所述的一种智能骨科手术系统,其特征在于:所述监控设备(5)包括多个微型摄像头(16),所述定位壳(11)的内壁开设有多个第一凹槽,多个所述微型摄像头(16)的两面均通过转轴与第一凹槽内壁的两侧转动连接,多个所述微型摄像头(16)的相反一面均固定连接有扇形蜗轮(12),多个所述扇形蜗轮(12)的相反一面均啮合连接有蜗杆(13),多个所述蜗杆(13)的上下两端分别与第一凹槽内壁的上下两侧转动连接,所述定位壳(11)的底面开设有多个第一空腔,多个所述第一空腔的内壁均固定连接有驱动马达(15),多个所述驱动马达(15)的输出端均贯穿第一空腔内壁的上侧至第一凹槽的内部,多个所述驱动马达(15)的输出端均与蜗杆(13)的下端固定连接。
4.根据权利要求2所述的一种智能骨科手术系统,其特征在于:所述清洁设备(7)包括弧形刮块(18),所述定位壳(11)的内壁固定连接有透明环形保护罩(17),所述弧形刮块(18)的内壁与透明环形保护罩(17)的内壁相接触,所述弧形刮块(18)的左面开设有杂质流动槽(19),所述定位壳(11)内壁的下侧固定连接有集料壳(20)。
5.根据权利要求4所述的一种智能骨科手术系统,其特征在于:所述集料壳(20)的内壁开设有第一环形滑槽,所述第一环形滑槽的内壁通过弧形滑块与弧形刮块(18)右面的下侧滑动连接。
6.根据权利要求4所述的一种智能骨科手术系统,其特征在于:所述定位壳(11)内壁的上侧开设有第二凹槽,所述第二凹槽的内部设置有外齿环(21),所述外齿环(21)内壁的左侧与弧形刮块(18)左面的上侧固定连接,所述外齿环(21)的四周均啮合连接有驱动齿轮(22),多个所述驱动齿轮(22)的底面均固定连接有连接转杆(23),所述定位壳(11)的四开设有第二空腔,多个所述连接转杆(23)的下端均贯穿第二凹槽内壁的下侧至第二空腔的内部,多个所述连接转杆(23)的下端均固定连接有传动链轮(24),多个所述传动链轮(24)的四周共同通过链条转动连接,所述定位壳(11)的左面开设有第三空腔,所述第三空腔的内壁固定连接有伺服电机(25),所述伺服电机(25)的输出端贯穿第三空腔内壁的上侧至第二空腔的内部,所述伺服电机(25)的输出端与左侧的传动链轮(24)的底面固定连接。
7.根据权利要求6所述的一种智能骨科手术系统,其特征在于:所述第二凹槽内壁的上下两侧均开设有第二环形滑槽,两个所述第二环形滑槽的内壁均通过环形滑块分别与外齿环(21)的上下两面滑动连接。
8.根据权利要求4所述的一种智能骨科手术系统,其特征在于:所述集料壳(20)内壁左侧的下方固定连接有排污软管(30),所述排污软管(30)的左端贯穿定位壳(11)内壁的左侧至其左面,所述设备主机(8)的底面固定连接有移动座(31),所述移动座(31)顶面的右侧固定连接有集料箱(32),所述移动座(31)的左端与集料箱(32)的右面固定连接。
9.根据权利要求2所述的一种智能骨科手术系统,其特征在于:所述吸附设备(6)包括多个吸盘(26),多个所述吸盘(26)的顶面均与定位壳(11)的底面固定连接,多个所述吸盘(26)的相对一面均共同固定连接有连通管(27),所述定位壳(11)顶面的左侧固定连接有抽气泵(28),所述抽气泵(28)的输出端固定连接有气体软管(29),所述气体软管(29)的下端与左侧的吸盘(26)的左面固定连接。
技术总结
本发明提供一种智能骨科手术系统,涉及骨科手术领域。包括手术设备和终端设备,手术设备通过2.4G无线传输设备与终端设备进行连接,终端设备通过2.4G无线控制设备与手术设备进行连接,手术设备包括骨钻设备、机械手、监控设备、多个照明设备、吸附设备和清洁设备,骨钻设备的顶面与机械手的输出端固定连接。本发明在定位圈中设置有多个微型摄像头,从而使得骨钻设备在进行手术的时候,可以将手术的位置进行全面的图像采集,从而避免手术盲区的存在,并且将数据传输至终端控制器上,通过终端方便控制设备的运作,从而为手术带来便捷,并且增加了手术的准确性。
技术研发人员:罗鸿,弓贺炜,周学儒
受保护的技术使用者:北京积水潭医院贵州医院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!