使用手术用机器人的手术图像的提供方法以及信息处理系统与流程
本发明涉及使用手术用机器人的手术图像的提供方法以及信息处理系统。
背景技术:
1、以往,进行使用手术用机器人的外科手术。手术用机器人具备控制台(操作装置)和手术机器人臂(臂装置)。在手术机器人臂上安装有手术器具,通过操作员操作控制台而手术机器人臂以及手术器具动作。最好以使患者安心地接受手术的方式,不论是哪个操作员都提高操作控制台的技能的熟练度。
2、在以下的专利文献1中,记载了通过深度摄影机(depth camera)摄影在手术室中进行的使用手术用机器人的外科手术的情形并进行存储,并在手术后能够播放对摄像图像进行示意化而成的图像的系统。另外,专利文献1的系统将手术机器人臂的状态、控制台的手持输入装置(handheld uid)的状态等历史存储为系统数据。存储的系统数据重构机器人臂以及手术器具的位置、朝向、移动,被用于对摄像图像进行示意化。
3、现有技术文献
4、专利文献
5、专利文献1:国际公开第2021/247050号
技术实现思路
1、然而,在上述专利文献1的系统中,只是能够确认将对基于手术用机器人的外科手术的情形进行摄像而成的图像进行示意化而得到的图像,难以确认操作员在手术中如何操作了控制台。
2、鉴于上述课题,本发明的目的在于提供一种能够容易并且正确地确认手术用机器人或者手术器具的动作和为此的操作对象的操作的使用手术用机器人的手术图像的提供方法以及信息处理系统。
3、本发明提供一种使用手术用机器人(4)的手术图像(400)的提供方法,提供利用手术用机器人(4)进行的手术的图像(400),该手术用机器人(4)具备安装有手术器具(121~124)的臂装置(1)和为了驱动臂装置(1)而操作员操作的操作装置(2),其中,取得表示通过操作员操作操作装置(2)的操作对象(221、231~237、211)而变化的操作对象(221、231~237、211)的状态的状态日志(s1),根据状态日志,生成将操作员针对操作对象(221、231~237、211)的操作进行视觉化而成的重构图像(432a、432b、434、435、440)(s2),提供将表示手术用机器人(4)或者手术器具(121~124)的动作的动作图像(401~404)和重构图像(432a、432b、434、435、440)关联起来的手术图像(400)(s5)。
4、根据本发明的使用手术用机器人的手术图像的提供方法,观察者通过参照动作图像和重构图像,能够容易并且正确地确认手术用机器人或者手术器具的动作和为此的操作对象的操作。
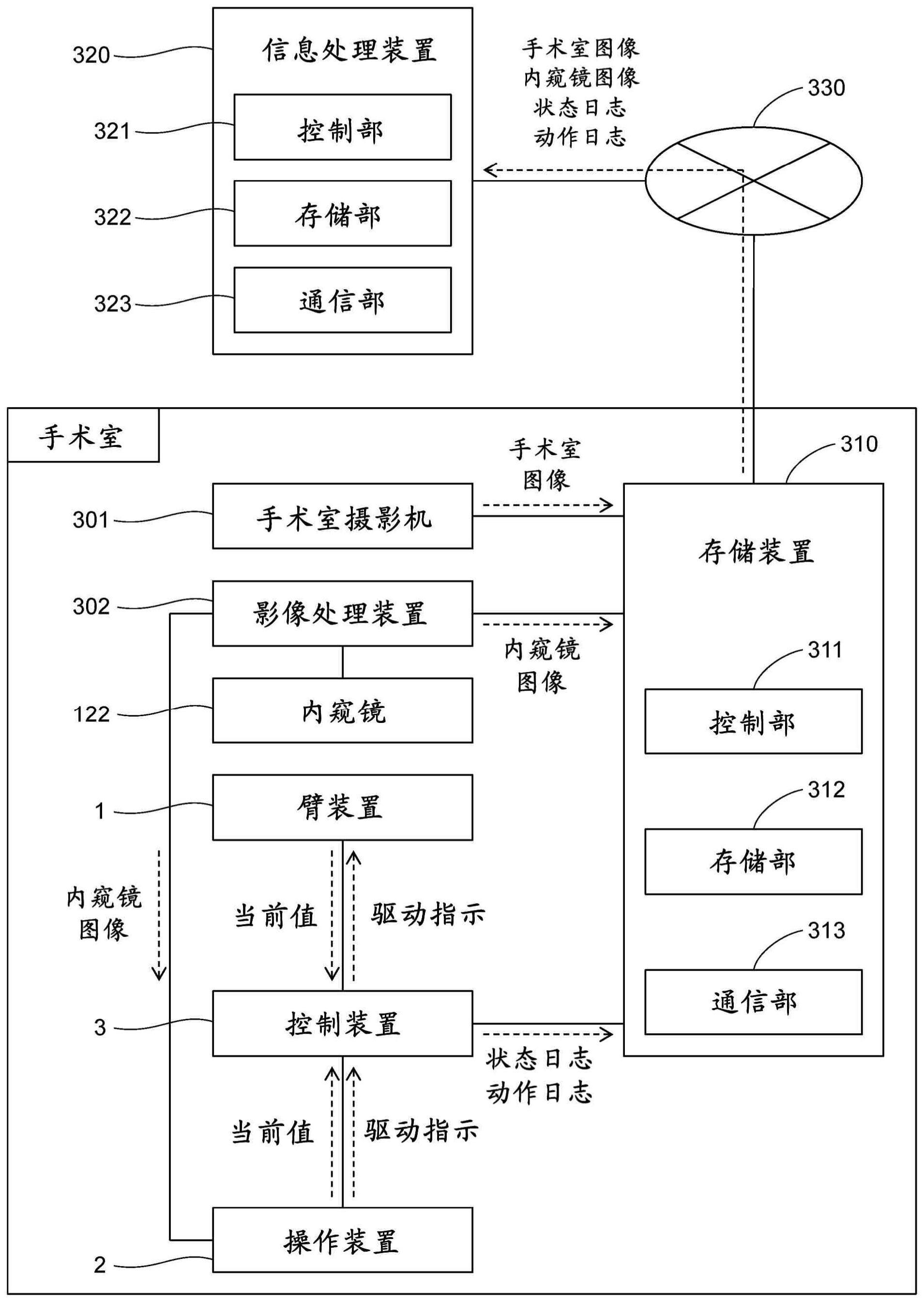
5、本发明的信息处理系统(5)具备:存储装置(310),存储表示通过操作员操作为了驱动安装有手术器具(121~124)的手术用机器人(4)的臂装置(1)而操作员操作的操作装置(2)的操作对象(221、231~237、211)而变化的操作对象(221、231~237、211)的状态的状态日志;以及信息处理装置(320),根据存储于存储装置(310)的状态日志,生成将操作员针对操作对象(221、231~237、211)的操作进行视觉化而成的重构图像(432a、432b、434、435、440),提供将表示手术用机器人(4)或者手术器具(121~124)的动作的动作图像(401~404)和重构图像(432a、432b、434、435、440)关联起来的手术图像(400)。
6、根据本发明的信息处理系统,观察者通过参照动作图像和重构图像,能够容易并且正确地确认手术用机器人或者手术器具的动作和为此的操作对象的操作。
7、根据本发明,能够容易并且正确地确认手术用机器人或者手术器具的动作和为此的操作对象的操作。
技术特征:
1.一种使用手术用机器人的手术图像的提供方法,提供利用手术用机器人进行的手术的图像,该手术用机器人具备安装有手术器具的臂装置和为了驱动所述臂装置而操作员操作的操作装置,其中,
2.根据权利要求1所述的使用手术用机器人的手术图像的提供方法,其中,
3.根据权利要求1所述的使用手术用机器人的手术图像的提供方法,其中,
4.根据权利要求3所述的使用手术用机器人的手术图像的提供方法,其中,
5.根据权利要求1所述的使用手术用机器人的手术图像的提供方法,其中,
6.根据权利要求1所述的使用手术用机器人的手术图像的提供方法,其中,
7.根据权利要求1所述的使用手术用机器人的手术图像的提供方法,其中,
8.根据权利要求1所述的使用手术用机器人的手术图像的提供方法,其中,
9.根据权利要求1所述的使用手术用机器人的手术图像的提供方法,其中,
10.根据权利要求1所述的使用手术用机器人的手术图像的提供方法,其中,还包括:
11.根据权利要求1所述的使用手术用机器人的手术图像的提供方法,其中,
12.根据权利要求1所述的使用手术用机器人的手术图像的提供方法,其中,还包括:
13.根据权利要求1所述的使用手术用机器人的手术图像的提供方法,其中,
14.根据权利要求13所述的使用手术用机器人的手术图像的提供方法,其中,还包括:
15.根据权利要求1所述的使用手术用机器人的手术图像的提供方法,其中,还包括:
16.根据权利要求1所述的使用手术用机器人的手术图像的提供方法,其中,
17.根据权利要求16所述的使用手术用机器人的手术图像的提供方法,其中,
18.根据权利要求1所述的使用手术用机器人的手术图像的提供方法,其中,
19.根据权利要求1所述的使用手术用机器人的手术图像的提供方法,其中,
20.根据权利要求19所述的使用手术用机器人的手术图像的提供方法,其中,
21.根据权利要求19所述的使用手术用机器人的手术图像的提供方法,其中,还包括:
22.根据权利要求19所述的使用手术用机器人的手术图像的提供方法,其中,还包括:
23.根据权利要求1所述的使用手术用机器人的手术图像的提供方法,其中,
24.一种信息处理系统,具备:
技术总结
提供能够容易并且正确地确认手术用机器人或者手术器具的动作和为此的操作对象的操作的使用手术用机器人的手术图像的提供方法以及信息处理系统。在使用手术用机器人的手术图像的提供方法中,取得表示通过操作员操作操作装置(2)的操作对象而变化的操作对象的状态的状态日志,根据状态日志,生成将操作员针对操作对象的操作进行视觉化而成的重构图像,提供将表示手术用机器人或者手术器具的动作的动作图像和重构图像关联起来的手术图像。
技术研发人员:大桥政尚,北山丰,石野恵子,池田有沙
受保护的技术使用者:希森美康株式会社
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!