内窥镜的路径规划方法、装置、系统和存储介质与流程
本申请涉及医学图像处理,特别是涉及内窥镜的路径规划方法、装置、系统和存储介质。
背景技术:
1、内窥镜检查一种常见的医学检查方法,内窥镜可以经人体的天然孔道或经小切口进入体内,通过设备外部成像用于人体器官或组织的检查。但是,传统的内窥镜检查技术通常依赖于医生的个人经验和操作技能,检查过程中广泛存在不规范操作,进而导致隐秘部位漏检、病变区域近景拍摄不清等问题。因此,为了避免上述问题,通常需要对内窥镜检查路径进行规划。
2、目前的路径规划方法,将医学影像数据输入对应的器官分割模型,得到医学影像数据中管腔器官的分割结果,从分割结果中提取出管腔器官的中心线信息,并根据该中心线,确定内窥镜的行进路径。但是,上述方法无法结合检查部位的关键信息进行内窥镜路径规划,导致内窥镜的路径规划不准确。
3、针对相关技术中存在无法结合检查部位的关键信息进行内窥镜路径规划的问题,目前还没有提出有效的解决方案。
技术实现思路
1、在本实施例中提供了一种内窥镜的路径规划方法、装置、系统和存储介质,以解决相关技术中无法结合检查部位的关键信息进行内窥镜路径规划的问题。
2、第一个方面,在本实施例中提供了一种内窥镜的路径规划方法,所述方法包括:
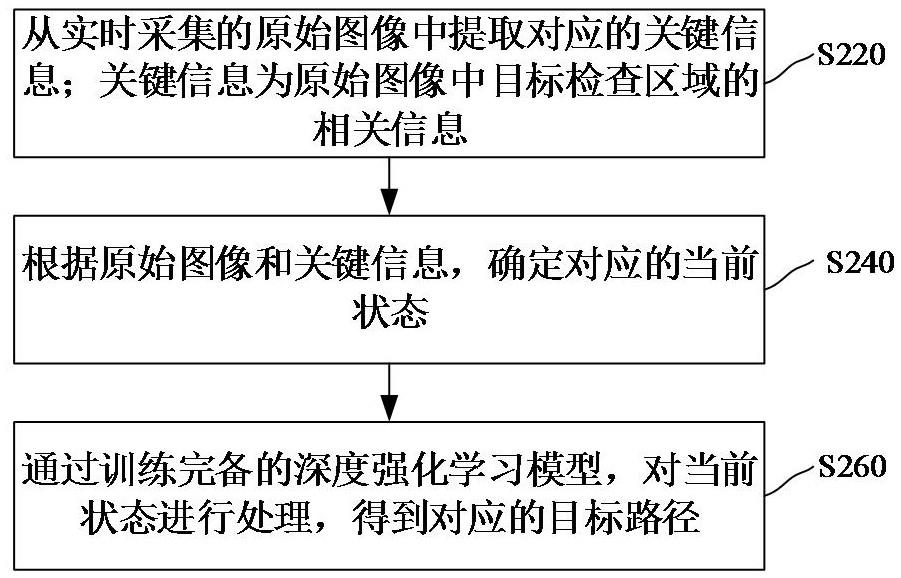
3、从实时采集的原始图像中提取对应的关键信息;所述关键信息为所述原始图像中目标检查区域的相关信息;
4、根据所述原始图像和所述关键信息,确定对应的当前状态;
5、通过训练完备的深度强化学习模型,对所述当前状态进行处理,得到对应的目标路径。
6、在其中的一些实施例中,所述从实时采集的原始图像中提取对应的关键信息,包括:
7、通过训练完备的提取算法,对所述实时采集的原始图像进行信息提取,得到对应的关键信息。
8、在其中的一些实施例中,所述从实时采集的原始图像中提取对应的关键信息之后,还包括:
9、判断所述关键信息是否为新的关键信息;
10、若否,则舍弃所述关键信息。
11、在其中的一些实施例中,所述根据所述原始图像和所述关键信息,确定对应的当前状态,包括:
12、生成所述关键信息对应的掩码;
13、将所述原始图像和所述掩码进行图像拼接,得到所述当前状态。
14、在其中的一些实施例中,所述通过训练完备的深度强化学习模型,对所述当前状态进行处理,得到对应的目标路径之前,还包括:
15、将样本图像对应的训练数据集,输入至待训练的深度强化学习模型;
16、在所述待训练的深度强化学习模型中,对所述样本图像对应的当前状态进行更新;
17、根据更新结果,优化所述待训练的深度强化学习模型对应的损失函数;
18、根据优化后的损失函数,调整所述待训练的深度强化学习模型,得到所述训练完备的深度强化学习模型。
19、在其中的一些实施例中,所述通过训练完备的深度强化学习模型,对所述当前状态进行处理,得到对应的目标路径包括:
20、通过所述训练完备的深度强化学习模型,对所述当前状态进行处理,得到对应的最大价值动作;
21、根据所述最大价值动作,确定对应的目标路径。
22、在其中的一些实施例中,所述通过训练完备的深度强化学习模型,对所述当前状态进行处理,得到对应的目标路径之后,还包括:
23、获取所述目标路径对应的实际操作路径;
24、根据多个预设的操作参数,对所述实际操作路径进行评估,得到对应的操作评分。
25、第二个方面,在本实施例中提供了一种内窥镜的路径规划装置,所述装置包括:提取模块、结合模块和处理模块;
26、所述提取模块,用于从实时采集的原始图像中提取对应的关键信息;所述关键信息为所述原始图像中目标检查区域的相关信息;
27、所述结合模块,用于根据所述原始图像和所述关键信息,确定对应的当前状态;
28、所述处理模块,用于通过训练完备的深度强化学习模型,对所述当前状态进行处理,得到对应的目标路径。
29、第三个方面,在本实施例中提供了一种内窥镜的路径规划系统,所述系统包括:内窥镜镜头、内窥镜检查仪器、信息提取模块以及路径分析模块;
30、所述内窥镜镜头,用于获取实时的原始图像;
31、所述内窥镜检查仪器,用于将所述原始图像输入至所述信息提取单元;
32、所述信息提取模块,用于从实时采集的原始图像中提取对应的关键信息;所述关键信息为所述原始图像中目标检查区域的相关信息;
33、所述路径分析模块,用于根据所述原始图像和所述关键信息,确定对应的当前状态,并通过训练完备的深度强化学习模型,对所述当前状态进行处理,得到对应的目标路径。
34、第四个方面,在本实施例中提供了一种存储介质,其上存储有计算机程序,该程序被处理器执行时实现上述第一个方面所述的内窥镜的路径规划方法。
35、与相关技术相比,在本实施例中提供的内窥镜的路径规划方法、装置、系统和存储介质,通过从实时采集的原始图像中提取对应的关键信息,关键信息为原始图像中目标检查区域的相关信息,根据原始图像和关键信息,确定对应的当前状态,并通过训练完备的深度强化学习模型,对当前状态进行处理,得到对应的目标路径,解决了无法结合检查部位的关键信息进行内窥镜路径规划的问题,实现了提高内窥镜路径规划的准确性。
36、本申请的一个或多个实施例的细节在以下附图和描述中提出,以使本申请的其他特征、目的和优点更加简明易懂。
技术特征:
1.一种内窥镜的路径规划方法,其特征在于,所述方法包括:
2.根据权利要求1所述的内窥镜的路径规划方法,其特征在于,所述从实时采集的原始图像中提取对应的关键信息,包括:
3.根据权利要求1所述的内窥镜的路径规划方法,其特征在于,所述从实时采集的原始图像中提取对应的关键信息之后,还包括:
4.根据权利要求1所述的内窥镜的路径规划方法,其特征在于,所述根据所述原始图像和所述关键信息,确定对应的当前状态,包括:
5.根据权利要求1所述的内窥镜的路径规划方法,其特征在于,所述通过训练完备的深度强化学习模型,对所述当前状态进行处理,得到对应的目标路径之前,还包括:
6.根据权利要求1所述的内窥镜的路径规划方法,其特征在于,所述通过训练完备的深度强化学习模型,对所述当前状态进行处理,得到对应的目标路径包括:
7.根据权利要求1所述的内窥镜的路径规划方法,其特征在于,所述通过训练完备的深度强化学习模型,对所述当前状态进行处理,得到对应的目标路径之后,还包括:
8.一种内窥镜的路径规划装置,其特征在于,所述装置包括:提取模块、结合模块和处理模块;
9.一种内窥镜的路径规划系统,其特征在于,所述系统包括:内窥镜镜头、内窥镜检查仪器、信息提取模块以及路径分析模块;
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至权利要求7中任一项所述的内窥镜的路径规划方法的步骤。
技术总结
本申请涉及一种内窥镜的路径规划方法、装置、系统和存储介质,其中,该内窥镜的路径规划方法包括:通过从实时采集的原始图像中提取对应的关键信息,关键信息为原始图像中目标检查区域的相关信息,根据原始图像和关键信息,确定对应的当前状态,并通过训练完备的深度强化学习模型,对当前状态进行处理,得到对应的目标路径,通过本申请,解决了无法结合检查部位的关键信息进行内窥镜路径规划的问题,实现了提高内窥镜路径规划的准确性。
技术研发人员:周奇明,姚卫忠
受保护的技术使用者:浙江华诺康科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!