用于介入手术机器人的从端驱动装置
本发明涉及手术机器人,具体而言,涉及一种用于介入手术机器人的从端驱动装置。
背景技术:
1、微创血管介入手术是心脑血管疾病诊断、治疗的基本手段,目前实施的多数血管病变诊断、血管重建手术都需借助这项技术。导丝-导管的操作是微创血管介入手术的核心内容,决定着手术质量。目前,介入医生借助数字剪影血管造影成像技术(digitalsubtraction angiography,dsa)手动完成导丝-导管在病人血管内的定位操作。常规被动导丝、导引导管、球囊导管是手术中使用的基本器械。使用机器人装置进行导丝(导管或其他器械,下文同)定位操作,有利于提高定位操作精度与稳定度、将医护人员从辐射中解放出来、避免医护人员因穿厚重铅衣而带来的附加伤害、避免医护人员因疲倦而造成术中操作不可靠的情况、改善传统介入手术极度依赖医生个人经验的情况、降低介入手术的学习曲线、为血管介入手术提供更精确的操作。
2、在相关技术中,医用导管为空腔管状结构,内部的空腔为造影剂注射通道或医疗器械输送通道。由于导管硬度较强不便于完成血管选择,采用柔顺性较强的实心导丝引导导管进入靶定血管。手术过程中,医生在股动脉或桡动脉进行血管穿刺并留置血管鞘,作为导管进入血管的入口。导管经血管鞘入患者体内的血管,导丝从导管内部的通道进入血管。通常由介入医生与其副手两人四手完成对导管、导丝前进、后撤以及旋转的控制。利用机器人辅助血管介入手术时,利用机器人实现导丝前进(后撤)、导丝旋转等运动是核心功能之一。
3、但是,相关技术中的介入手术机器人的管丝递送功能分离,影响操作效率。
技术实现思路
1、本发明提供一种用于介入手术机器人的从端驱动装置,以解决相关技术中的介入手术机器人的管丝递送功能分离,影响操作效率的问题。
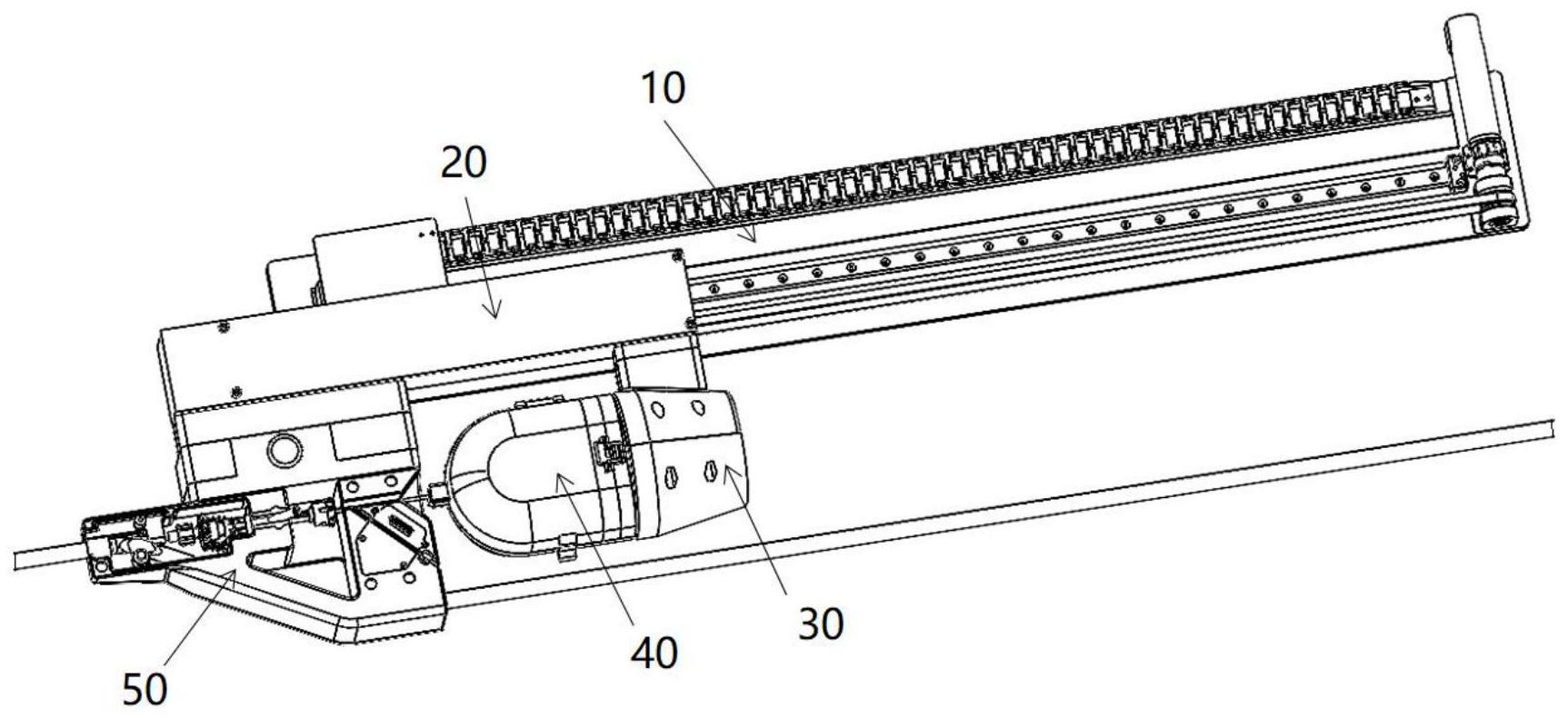
2、本发明提供了一种用于介入手术机器人的从端驱动装置,用于介入手术机器人的从端驱动装置包括:推送机构,包括导轨、滑台以及推送驱动件,推送驱动件与滑台驱动连接,以驱动滑台在导轨上滑动;导管驱动机构,包括安装在滑台上的第一壳体以及设置在第一壳体内的导管旋转驱动件、球囊导管递送驱动件、导丝旋转驱动件;导丝驱动机构,包括安装在第一壳体上的第二壳体以及设置在第二壳体内的导丝旋转传动件和导丝递送驱动件,导丝递送驱动件的驱动轴与导丝旋转传动件的输出轴同轴设置;无菌筒,包括滚筒以及可转动地设置在滚筒内的卷丝盘,导丝旋转驱动件通过导丝旋转传动件与滚筒驱动连接,导丝递送驱动件与卷丝盘驱动连接,滚筒的转动轴线与卷丝盘的转动轴线相垂直;无菌盒,包括安装在第一壳体上的第三壳体以及设置在第三壳体内的导管传动件、球囊导管传动件以及c管递送件,导管旋转驱动件与导管传动件驱动连接以旋转导管,球囊导管递送驱动件与球囊导管传动件驱动连接以递送球囊导管。
3、进一步地,导丝旋转传动件包括导丝旋转动力输入轴和导丝旋转动力输出轴,导丝旋转动力输入轴的轴线和导丝旋转动力输出轴的轴线相垂直,导丝旋转驱动件与导丝旋转动力输入轴的第一端驱动连接,导丝旋转动力输入轴的第二端设置有第一传动齿圈,导丝旋转动力输出轴的第一端设置有与第一传动齿圈相啮合的第二传动齿圈,导丝旋转动力输出轴的第二端与滚筒驱动连接。
4、进一步地,滚筒在其转动轴线的一端设置有安装槽,导丝旋转动力输出轴的第二端插入安装槽内,安装槽内设置有定位轴,导丝旋转动力输出轴的第二端设置有与定位轴定位配合的定位孔。
5、进一步地,导丝递送驱动件包括导丝递送驱动电机,导丝递送驱动电机的输出轴与导丝旋转动力输出轴同轴设置,且导丝递送驱动电机的输出轴穿设在导丝旋转动力输出轴内。
6、进一步地,无菌筒还包括设置在滚筒内的第一导丝递送锥齿轮、第二导丝递送锥齿轮以及导丝递送输出轴,第一导丝递送锥齿轮的轴线与滚筒的转动轴线相同,导丝递送输出轴的轴线与滚筒的转动轴线相垂直,导丝递送驱动件的驱动轴与第一导丝递送锥齿轮驱动连接,第一导丝递送锥齿轮与第二导丝递送锥齿轮相啮合,导丝递送输出轴设置有与第二导丝递送锥齿轮相啮合的第三传动齿圈,导丝递送输出轴与卷丝盘驱动连接。
7、进一步地,滚筒包括滚筒本体以及可开合地设置在滚筒本体上的滚筒盖。
8、进一步地,卷丝盘包括外盘、内盘以及翻盖,内盘设置在外盘和翻盖所围成的腔体内,腔体内设置有位于内盘的外边沿的外侧的压丝轮机构,内盘设置有导丝加持机构以及驱动孔,导丝递送驱动件通过驱动孔与卷丝盘驱动连接。
9、进一步地,c管递送件包括破口器,第三壳体内设置有c管过道,c管能够穿过破口器在c管过道中滑动。
10、进一步地,无菌盒还包括可移动地设置在第三壳体上的卡扣件,卡扣件具有卡钩,第一壳体设置有卡槽,卡钩能够卡设在卡槽内。
11、进一步地,导丝驱动机构、无菌筒以及无菌盒均位于第一壳体的同一侧,且导丝驱动机构、无菌筒以及无菌盒顺次排布。
12、应用本发明的技术方案,该用于介入手术机器人的从端驱动装置包括推送机构、导管驱动机构、导丝驱动机构、无菌筒以及无菌盒。导管驱动机构、导丝驱动机构、无菌筒以及无菌盒均设置在滑台上,以实现上述机构的移动。导丝递送驱动件与卷丝盘驱动连接,以实现导丝的递送。导丝旋转驱动件通过导丝旋转传动件与滚筒驱动连接,以实现导丝的旋转。滑台移动的过程中实现递送导管的目的,导管旋转驱动件与导管传动件驱动连接以旋转导管,球囊导管递送驱动件与球囊导管传动件驱动连接以递送球囊导管。采用上述结构,该用于介入手术机器人的从端驱动装置集导管旋转、导管递送、导丝旋转、导丝递送、球囊导管递送为一体,实现多功能化,能够提升操作效率。
技术特征:
1.一种用于介入手术机器人的从端驱动装置,其特征在于,所述用于介入手术机器人的从端驱动装置包括:
2.根据权利要求1所述的用于介入手术机器人的从端驱动装置,其特征在于,所述导丝旋转传动件(32)包括导丝旋转动力输入轴(321)和导丝旋转动力输出轴(322),所述导丝旋转动力输入轴(321)的轴线和所述导丝旋转动力输出轴(322)的轴线相垂直,所述导丝旋转驱动件(24)与所述导丝旋转动力输入轴(321)的第一端驱动连接,所述导丝旋转动力输入轴(321)的第二端设置有第一传动齿圈,所述导丝旋转动力输出轴(322)的第一端设置有与所述第一传动齿圈相啮合的第二传动齿圈,所述导丝旋转动力输出轴(322)的第二端与所述滚筒(41)驱动连接。
3.根据权利要求2所述的用于介入手术机器人的从端驱动装置,其特征在于,所述滚筒(41)在其转动轴线的一端设置有安装槽(411),所述导丝旋转动力输出轴(322)的第二端插入所述安装槽(411)内,所述安装槽(411)内设置有定位轴(412),所述导丝旋转动力输出轴(322)的第二端设置有与所述定位轴(412)定位配合的定位孔(3221)。
4.根据权利要求2所述的用于介入手术机器人的从端驱动装置,其特征在于,所述导丝递送驱动件(33)包括导丝递送驱动电机,所述导丝递送驱动电机的输出轴与所述导丝旋转动力输出轴(322)同轴设置,且所述导丝递送驱动电机的输出轴穿设在所述导丝旋转动力输出轴(322)内。
5.根据权利要求1所述的用于介入手术机器人的从端驱动装置,其特征在于,所述无菌筒(40)还包括设置在所述滚筒(41)内的第一导丝递送锥齿轮(43)、第二导丝递送锥齿轮(44)以及导丝递送输出轴(45),所述第一导丝递送锥齿轮(43)的轴线与所述滚筒(41)的转动轴线相同,所述导丝递送输出轴(45)的轴线与所述滚筒(41)的转动轴线相垂直,所述导丝递送驱动件(33)的驱动轴与所述第一导丝递送锥齿轮(43)驱动连接,所述第一导丝递送锥齿轮(43)与所述第二导丝递送锥齿轮(44)相啮合,所述导丝递送输出轴(45)设置有与所述第二导丝递送锥齿轮(44)相啮合的第三传动齿圈,所述导丝递送输出轴(45)与所述卷丝盘(42)驱动连接。
6.根据权利要求1所述的用于介入手术机器人的从端驱动装置,其特征在于,所述滚筒(41)包括滚筒本体(413)以及可开合地设置在所述滚筒本体(413)上的滚筒盖(414)。
7.根据权利要求1所述的用于介入手术机器人的从端驱动装置,其特征在于,所述卷丝盘(42)包括外盘(421)、内盘(422)以及翻盖(423),所述内盘(422)设置在所述外盘(421)和所述翻盖(423)所围成的腔体内,所述腔体内设置有位于所述内盘(422)的外边沿的外侧的压丝轮机构(424),所述内盘(422)设置有导丝加持机构(425)以及驱动孔(426),所述导丝递送驱动件(33)通过所述驱动孔(426)与所述卷丝盘(42)驱动连接。
8.根据权利要求1所述的用于介入手术机器人的从端驱动装置,其特征在于,所述c管递送件(54)包括破口器(541),所述第三壳体(51)内设置有c管过道(511),c管能够穿过所述破口器(541)在所述c管过道(511)中滑动。
9.根据权利要求1所述的用于介入手术机器人的从端驱动装置,其特征在于,所述无菌盒(50)还包括可移动地设置在所述第三壳体(51)上的卡扣件(55),所述卡扣件(55)具有卡钩(551),所述第一壳体(21)设置有卡槽(211),所述卡钩(551)能够卡设在所述卡槽(211)内。
10.根据权利要求1所述的用于介入手术机器人的从端驱动装置,其特征在于,所述导丝驱动机构(30)、所述无菌筒(40)以及所述无菌盒(50)均位于所述第一壳体(21)的同一侧,且所述导丝驱动机构(30)、所述无菌筒(40)以及所述无菌盒(50)顺次排布。
技术总结
本发明提供了一种用于介入手术机器人的从端驱动装置,该用于介入手术机器人的从端驱动装置包括:推送机构,包括导轨、滑台以及推送驱动件;导管驱动机构,包括第一壳体、导管旋转驱动件、球囊导管递送驱动件、导丝旋转驱动件;导丝驱动机构,包括第二壳体、导丝旋转传动件、导丝递送驱动件;无菌筒,包括滚筒和卷丝盘;无菌盒,包括第三壳体、导管传动件、球囊导管传动件以及C管递送件,导管旋转驱动件与导管传动件驱动连接以旋转导管,球囊导管递送驱动件与球囊导管传动件驱动连接以递送球囊导管。通过本申请提供的技术方案,能够解决相关技术中的介入手术机器人的管丝递送功能分离,影响操作效率的问题。
技术研发人员:窦克非,丰雷,朱成刚,林章宇,何际宁,袁生,吴少宇,徐晗,王昊
受保护的技术使用者:中国医学科学院阜外医院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!