全自动静脉穿刺设备和全自动静脉穿刺方法与流程
本申请实施例属于医疗,特别是涉及一种全自动静脉穿刺设备和全自动静脉穿刺方法。
背景技术:
1、在临床医疗诊断和治疗过程中,静脉注射、抽血等操作极为常见,这些操作都需要通过静脉穿刺来实现,准确地进行静脉穿刺是每一个医护人员进入临床前的必备技能。医护人员在进行这些操作时,需要对病人的静脉位置有着准确的判断。但是,在给肥胖、皮肤表面暗沉或有遗留的疤痕等人群实施静脉穿刺操作时,缺乏经验的医护人员可能难以准确确定静脉位置,容易导致穿刺失败甚至错误注射至动脉引起皮下出血等严重后果。另一方面,血液检测作为确诊包括传染性疾病在内的多种疾病的一种重要手段,近距离的静脉穿刺操作增加了医护人员被感染的风险。因此,临床上对于无接触机器人自主取血和注射具有迫切的需求。
技术实现思路
1、有鉴于此,本申请实施例提供了一种全自动静脉穿刺设备和全自动静脉穿刺方法,可以在临床医疗诊断和治疗过程中实现全自动的静脉穿刺。
2、本申请实施例的第一方面提供了一种全自动静脉穿刺方法,包括:
3、采集待穿刺区域的全局表征信息,所述全局表征信息包括所述待穿刺区域的静脉血管分布信息和点云信息;
4、根据所述全局表征信息,在所述待穿刺区域中确定目标穿刺区域;
5、对所述目标穿刺区域进行光声扫描成像;
6、基于所述光声扫描成像的成像结果和所述全局表征信息,确定穿刺策略;
7、按照所述穿刺策略在所述目标穿刺区域执行静脉穿刺操作。
8、本申请实施例的第二方面提供了一种全自动静脉穿刺设备,包括:
9、采集模块,用于采集待穿刺区域的全局表征信息,所述全局表征信息包括所述待穿刺区域的静脉血管分布信息和点云信息;
10、确定模块,用于根据所述全局表征信息,在所述待穿刺区域中确定目标穿刺区域;
11、扫描模块,用于对所述目标穿刺区域进行光声扫描成像;
12、策略模块,用于基于所述光声扫描成像的成像结果和所述全局表征信息,确定穿刺策略;
13、穿刺模块,用于按照所述穿刺策略在所述目标穿刺区域执行静脉穿刺操作。
14、本申请实施例的第三方面提供了一种全自动静脉穿刺设备,应用所述设备实现如下操作:
15、采集待穿刺区域的全局表征信息,所述全局表征信息包括所述待穿刺区域的静脉血管分布信息和点云信息;
16、根据所述全局表征信息,在所述待穿刺区域中确定目标穿刺区域;
17、对所述目标穿刺区域进行光声扫描成像;
18、基于所述光声扫描成像的成像结果和所述全局表征信息,确定穿刺策略;
19、按照所述穿刺策略在所述目标穿刺区域执行静脉穿刺操作。
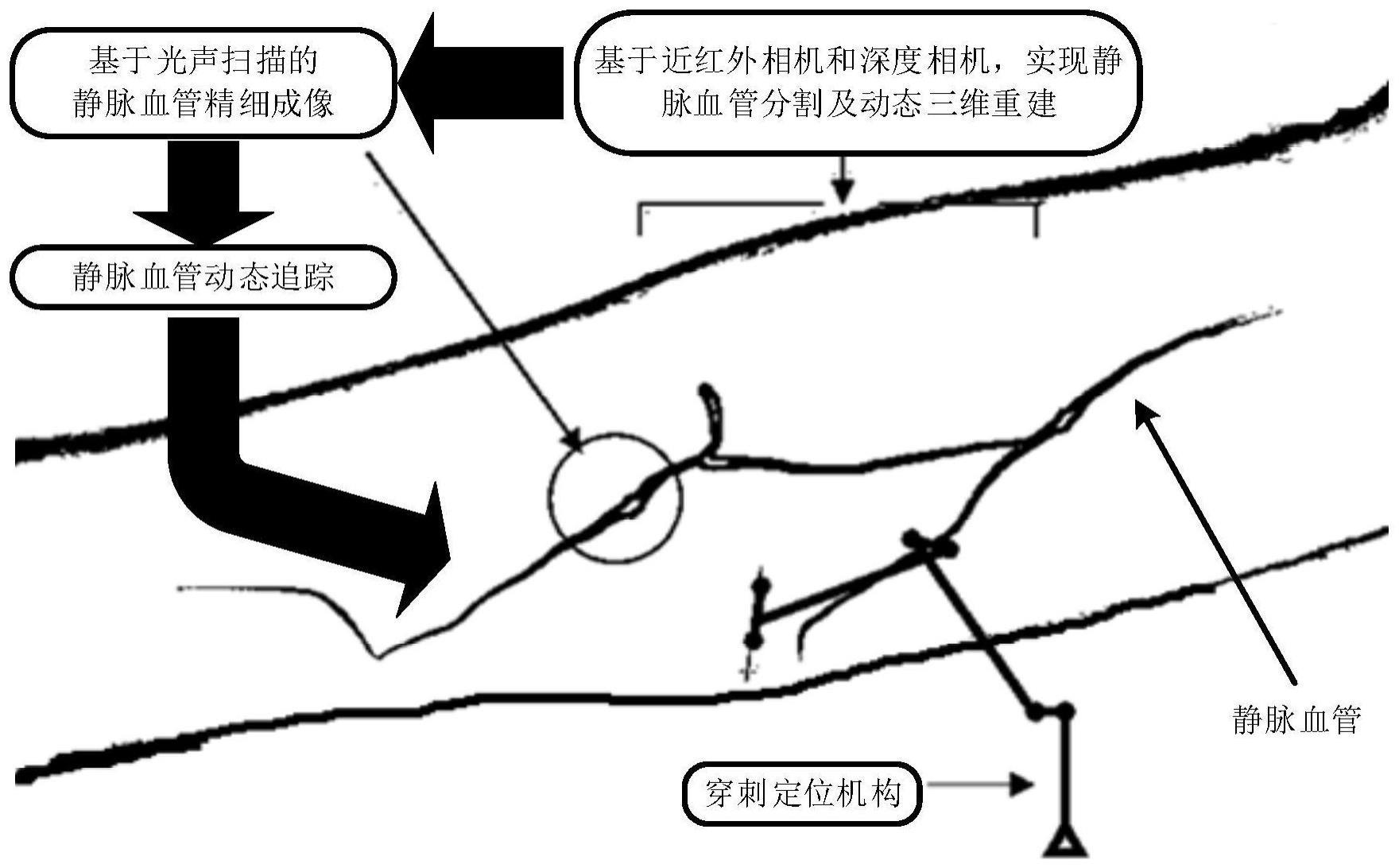
20、本申请实施例的第四方面提供了一种全自动静脉穿刺设备,包括近红外相机、深度相机、光声扫描仪、穿刺定位机构,以及用于控制所述近红外相机、所述深度相机、所述光声扫描仪、所述穿刺定位机构的控制单元,所述穿刺定位机构的末端包括穿刺针;其中:
21、所述近红外相机,用于采集待穿刺区域的静脉血管分布信息;
22、所述深度相机,用于采集所述待穿刺区域的皮肤表面轮廓的点云信息;
23、所述控制单元,用于根据所述静脉血管分布信息和所述点云信息生成所述待穿刺区域的全局表征信息,并根据所述全局表征信息,在所述待穿刺区域中确定目标穿刺区域;
24、所述光声扫描仪,用于对所述目标穿刺区域进行光声扫描成像;
25、所述控制单元,还用于基于所述光声扫描成像的成像结果和所述全局表征信息,确定穿刺策略;按照所述穿刺策略控制所述穿刺定位机构,以使所述穿刺针在所述目标穿刺区域执行静脉穿刺操作。
26、本申请实施例的第五方面提供了一种医疗设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上述第一方面所述的全自动静脉穿刺方法。
27、本申请实施例的第六方面提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如上述第一方面所述的全自动静脉穿刺方法。
28、本申请实施例的第七方面提供了一种计算机程序产品,当所述计算机程序产品在计算机上运行时,使得所述计算机执行上述第一方面所述的全自动静脉穿刺方法。
29、与现有技术相比,本申请实施例具有以下优点:
30、本申请实施例提供的全自动静脉穿刺设备可以利用近红外相机和深度相机辅助进行静脉血管的全局表征,得到待穿刺区域的全局表征信息。在此基础上,通过选择弯曲度低、深度浅的局部血管所在区域作为目标穿刺区域,可以对目标穿刺区域进行光声扫描成像。根据光声扫描成像的成像结果,可以获得实际穿刺需要的目标血管的相关信息,进而可以根据目标血管的相关信息确定穿刺策略。按照确定出的穿刺策略,可以在目标穿刺区域执行全自动的静脉穿刺操作。使用本申请实施例提供的全自动静脉穿刺设备,可以在没有医护人员介入的情况下,自动实现静脉穿刺,保证穿刺成功率。
技术特征:
1.一种全自动静脉穿刺设备,其特征在于,应用所述设备实现如下操作:
2.根据权利要求1所述的设备,其特征在于,所述采集待穿刺区域的全局表征信息,包括:
3.根据权利要求2所述的设备,其特征在于,所述控制近红外相机采集所述待穿刺区域的所述静脉血管分布信息,包括:
4.根据权利要求3所述的设备,其特征在于,所述从多张所述近红外相机图像中分割出所述待穿刺区域的所述静脉血管分布信息,包括:
5.根据权利要求1-4任一项所述的设备,其特征在于,所述静脉血管分布信息为二维图像,所述点云信息为三维图像,所述根据所述全局表征信息,在所述待穿刺区域中确定目标穿刺区域,包括:
6.根据权利要求5所述的设备,其特征在于,所述将所述静脉血管分布信息投影至所述点云信息中,得到所述待穿刺区域的三维融合模型,包括:
7.根据权利要求5所述的设备,其特征在于,所述基于所述静脉血管分布信息,确定所述待穿刺区域中的所述目标穿刺区域,包括:
8.根据权利要求1-4或6-7任一项所述的设备,其特征在于,所述对所述目标穿刺区域进行光声扫描成像,包括:
9.根据权利要求8所述的设备,其特征在于,所述全局表征信息包括融合所述静脉血管分布信息和所述点云信息得到的所述待穿刺区域的三维融合模型,所述基于所述光声扫描成像的成像结果和所述全局表征信息,确定穿刺策略,包括:
10.根据权利要求9所述的设备,其特征在于,所述基于所述目标融合模型,确定对所述目标血管进行穿刺的策略,包括:
11.根据权利要求9所述的设备,其特征在于,在基于所述目标融合模型,确定对所述目标血管进行穿刺的策略之后,还包括:
12.根据权利要求11所述的设备,其特征在于,所述对所述目标血管进行实时动态追踪,包括:
13.根据权利要求12所述的设备,其特征在于,所述根据实时动态追踪情况,更新所述穿刺策略,包括:
14.一种全自动静脉穿刺设备,其特征在于,包括近红外相机、深度相机、光声扫描仪、穿刺定位机构,以及用于控制所述近红外相机、所述深度相机、所述光声扫描仪、所述穿刺定位机构的控制单元,所述穿刺定位机构的末端包括穿刺针;其中:
15.一种医疗设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1-13任一项所述的全自动静脉穿刺设备所实现的操作。
16.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1-13任一项所述的全自动静脉穿刺设备所实现的操作。
技术总结
本申请实施例适用于医疗技术领域,提供了一种全自动静脉穿刺设备和全自动静脉穿刺方法,所述全自动静脉穿刺设备可以利用近红外相机和深度相机辅助进行静脉血管的全局表征,得到待穿刺区域的全局表征信息。在此基础上,通过选择弯曲度低、深度浅的局部血管所在区域作为目标穿刺区域,进而对目标穿刺区域进行光声扫描成像。根据光声扫描成像的成像结果,可以获得实际穿刺需要的目标血管的相关信息,进而可以根据目标血管的相关信息确定穿刺策略。按照确定出的穿刺策略,可以在目标穿刺区域执行全自动的静脉穿刺操作。使用本申请实施例提供的全自动静脉穿刺设备,可以在没有医护人员介入的情况下,自动实现静脉穿刺,保证穿刺成功率。
技术研发人员:孟李艾俐,肖霄,曾兴晖
受保护的技术使用者:元化智能科技(深圳)有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!