一种支持经呼吸道诊疗机器人精准移动的导向机构的制作方法
本发明涉及一种呼吸道医疗器械,具体是一种支持经呼吸道诊疗机器人精准移动的导向机构。
背景技术:
1、呼吸道疾病是世界范围内的一大健康问题,其中许多疾病需要通过内窥镜检查和治疗来进行有效的诊断和治疗。然而,现有技术的呼吸道内部诊疗设备仍存在一些不足之处,比如伸入呼吸道的操作管中的内窥镜、微型钳、加热棒等仪器,由于仪器通常由金属或塑料制成,在伸入呼吸道时,这些硬性仪器需要通过移动来完成检查和治疗,这会对呼吸道内壁产生很大的滑动摩擦力,从而导致患者产生不适,且移动的幅度不准确,使得仪器难以对准病状。
2、因此,有必要提供一种支持经呼吸道诊疗机器人精准移动的导向机构,以解决上述背景技术中提出的问题。
技术实现思路
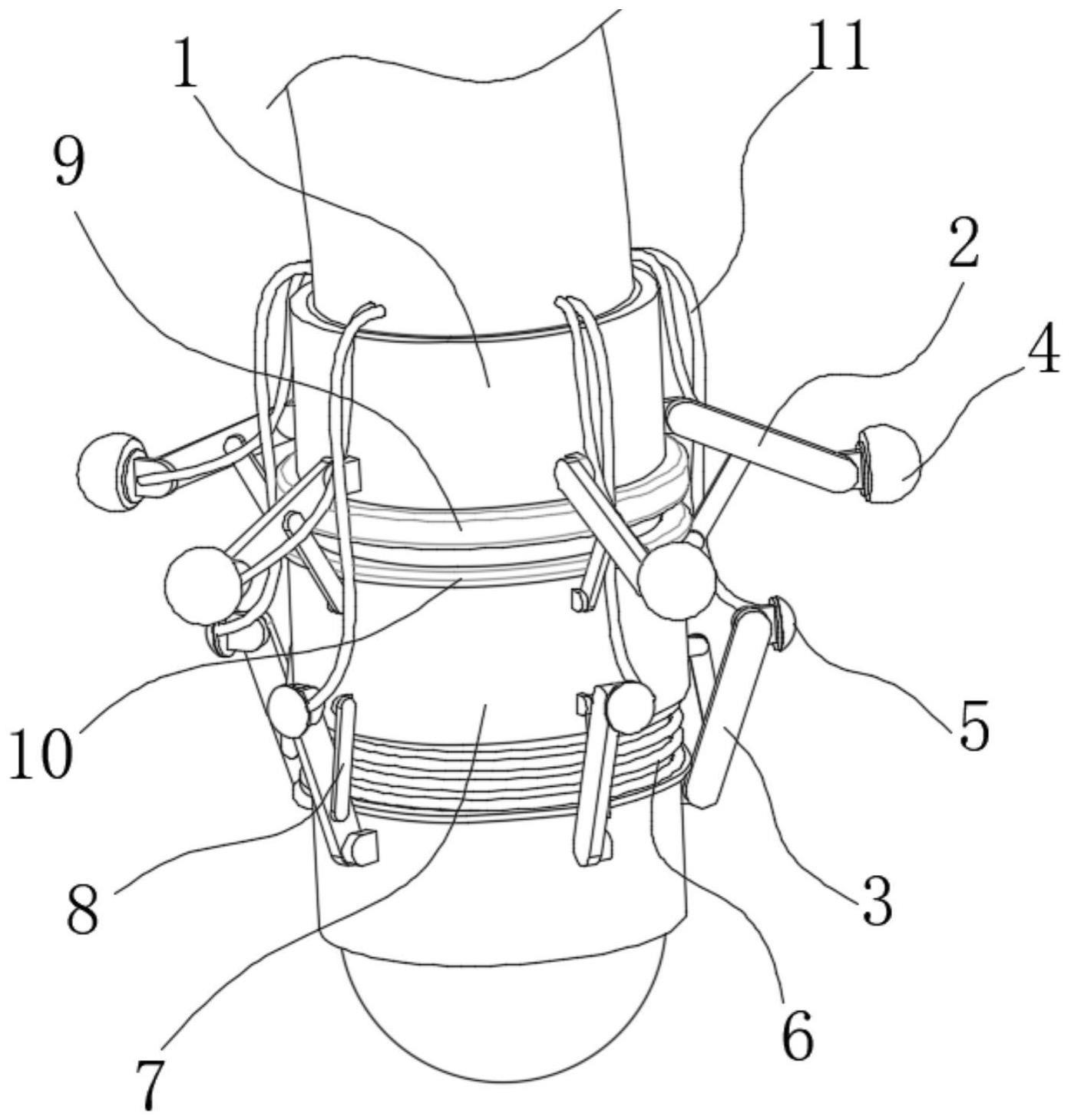
1、为实现上述目的,本发明提供如下技术方案:一种支持经呼吸道诊疗机器人精准移动的导向机构,包括导向筒,所述导向筒固定在操作管末端,所述导向筒外壁上下分别环形铰接有多根第一连杆和第二连杆,第一连杆末端设有第一接触球,所述第二连杆末端设有第二接触球,所述第一连杆和第二连杆间的导向筒外壁可滑动地套设有滑套,所述滑套上下分别铰接有一圈推杆,且每根所述推杆末端一一对应地与靠近其的第一连杆或第二连杆的中部铰接。
2、进一步的,作为优选,所述第一连杆下的导向筒外壁固定有一圈电磁环,所述滑套的上端固定有一圈导磁环。
3、进一步的,作为优选,所述滑套的下端与导向筒间连接有复位弹簧,所述复位弹簧提供使滑套向下移动的弹力。
4、进一步的,作为优选,所述第一接触球与第一连杆铰接,所述第二接触球与第二连杆铰接。
5、进一步的,作为优选,所述第一接触球和第二接触球为空心软性材料制成,且内部连通有毛细导管。
6、进一步的,作为优选,所述毛细导管嵌入到操作管中并连接到外部,并通过电子控制阀连接到气泵中。
7、进一步的,作为优选,所述滑套移动范围内的导向筒外壁涂有聚四氟乙烯涂层。
8、与现有技术相比,本发明的有益效果是:
9、本发明中,通过对毛细导管的充气和抽气能够使第一接触球和第二接触球膨胀或收缩,从而能够使第一连杆或第二连杆向使导向筒前进的方向摆动时,对应的第一接触球或第二接触球膨胀,以带动导向筒前进,而第一连杆或第二连杆向使导向筒后退的方向摆动时,对应的第一接触球或第二接触球收缩,不带动导向筒后退,从而使导向筒持续前进,由于导向筒的移动过程不会对患者的呼吸道内壁产生滑动摩擦,能够减少对患者产生的不舒适。
10、本发明中,不依靠第一连杆或第二连杆的摆动使第一接触球或第二接触球与呼吸道内壁贴合,而是通过第一接触球或第二接触球的膨胀和收缩来决定其是否与呼吸道内壁贴合,能够使第一接触球或第二接触球呼吸道内壁保持贴合且贴合的力度相对平稳,第一连杆或第二连杆的摆动只使得导向筒移动,能够减少患者的呼吸道内壁的刺痛感。
技术特征:
1.一种支持经呼吸道诊疗机器人精准移动的导向机构,包括导向筒(1),其特征在于,所述导向筒(1)固定在操作管末端,所述导向筒(1)外壁上下分别环形铰接有多根第一连杆(2)和第二连杆(3),第一连杆(2)末端设有第一接触球(4),所述第二连杆(3)末端设有第二接触球(5),所述第一连杆(2)和第二连杆(3)间的导向筒(1)外壁可滑动地套设有滑套(7),所述滑套(7)上下分别铰接有一圈推杆(8),且每根所述推杆(8)末端一一对应地与靠近其的第一连杆(2)或第二连杆(3)的中部铰接。
2.根据权利要求1所述的一种支持经呼吸道诊疗机器人精准移动的导向机构,其特征在于,所述第一连杆(2)下的导向筒(1)外壁固定有一圈电磁环(9),所述滑套(7)的上端固定有一圈导磁环(10)。
3.根据权利要求1所述的一种支持经呼吸道诊疗机器人精准移动的导向机构,其特征在于,所述滑套(7)的下端与导向筒(1)间连接有复位弹簧(6),所述复位弹簧(6)提供使滑套(7)向下移动的弹力。
4.根据权利要求1所述的一种支持经呼吸道诊疗机器人精准移动的导向机构,其特征在于,所述第一接触球(4)与第一连杆(2)铰接,所述第二接触球(5)与第二连杆(3)铰接。
5.根据权利要求1所述的一种支持经呼吸道诊疗机器人精准移动的导向机构,其特征在于,所述第一接触球(4)和第二接触球(5)为空心软性材料制成,且内部连通有毛细导管(11)。
6.根据权利要求5所述的一种支持经呼吸道诊疗机器人精准移动的导向机构,其特征在于,所述毛细导管(11)嵌入到操作管中并连接到外部,并通过电子控制阀连接到气泵中。
7.根据权利要求1所述的一种支持经呼吸道诊疗机器人精准移动的导向机构,其特征在于,所述滑套(7)移动范围内的导向筒(1)外壁涂有聚四氟乙烯涂层。
技术总结
本发明公开了一种支持经呼吸道诊疗机器人精准移动的导向机构,包括导向筒,所述导向筒固定在操作管末端,所述导向筒外壁上下分别环形铰接有多根第一连杆和第二连杆,第一连杆末端设有第一接触球,所述第二连杆末端设有第二接触球,所述第一连杆和第二连杆间的导向筒外壁可滑动地套设有滑套,所述滑套上下分别铰接有一圈推杆,且每根所述推杆末端一一对应地与靠近其的第一连杆或第二连杆的中部铰接。与现有技术相比,本发明减少对患者的呼吸道内壁产生滑动摩擦,减少对患者产生的不舒适。
技术研发人员:易新,谭茁,庄凌峰,凌一民,戴小敏,刘鑫,薛宇
受保护的技术使用者:苏州朗开医疗技术有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!