一种融合惯导和毫米波雷达的行人步态测量与识别方法
本发明提供了一种同时测量手机惯导和毫米波雷达的行人步态数据,并通过数据融合和强化学习对步态进行识别和分类的系统及方法。
背景技术:
1、行人步态识别技术是一种基于人体行走特征的生物识别技术,具有广泛的应用前景。传统的步态识别方法通常仅依赖于单一的传感器或数据源,存在准确率不高和鲁棒性差的问题。手机惯导技术可通过测量用户的加速度和角速度等参数获取步态特征,但受限于手机的位置和姿态,存在累积误差和可靠性问题。毫米波雷达技术能够实时获取行人的身体运动特征,但其单独应用存在成本高和设备复杂的问题。因此,结合手机惯导和毫米波雷达技术,并利用数据融合和强化学习算法,能够充分利用它们各自的优势,提高步态识别的准确率和鲁棒性。
技术实现思路
1、本发明提供了一种移动设备上的行人步态数据测量与识别系统,旨在通过结合手机惯导和毫米波雷达数据,实现对行人步态的准确测量和识别。该系统利用移动设备上的传感器数据和深度学习技术,为行人识别、人体动作分析和健康监测等领域提供有效的解决方案。
2、为实现上述目的,本发明采用如下技术方案:
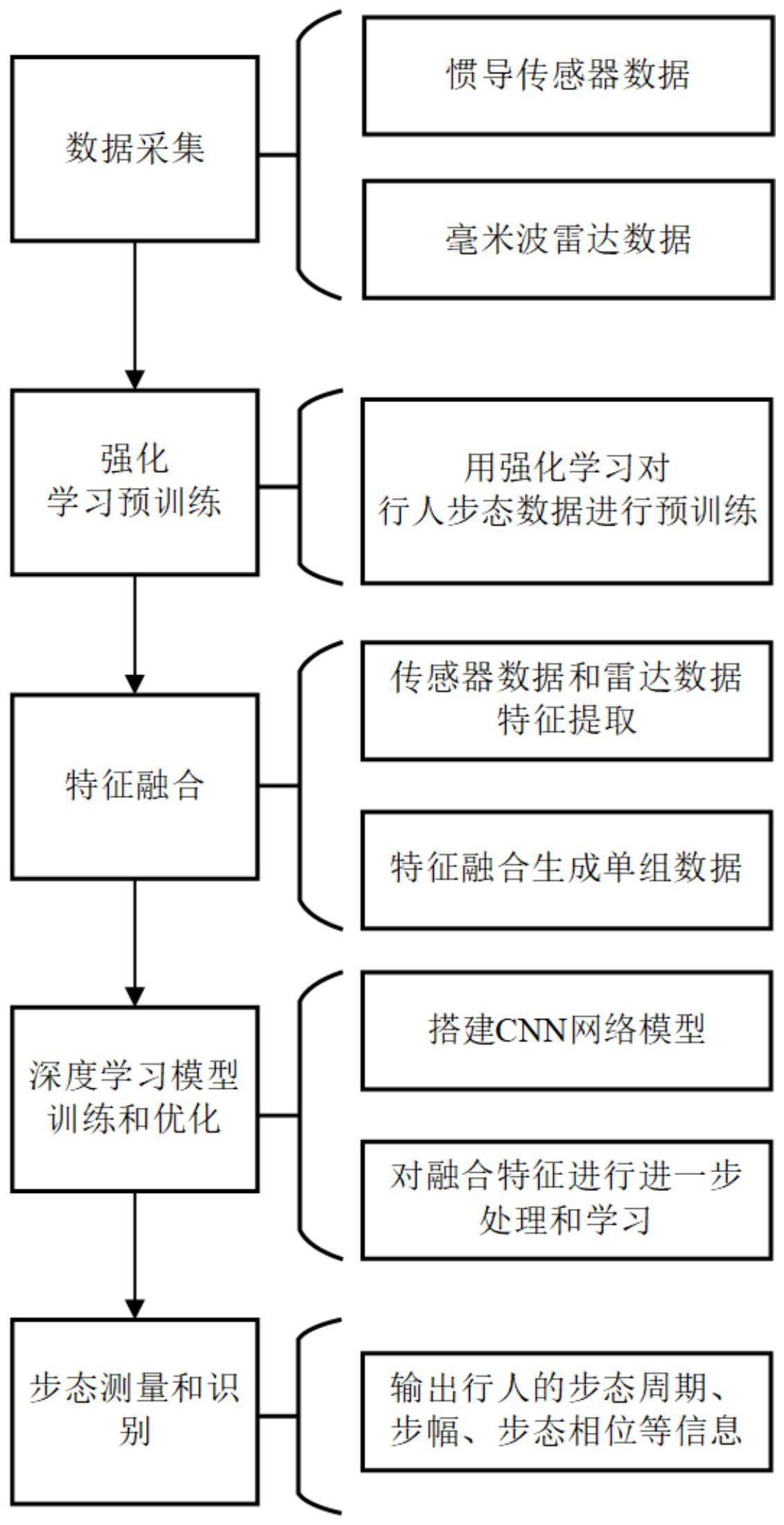
3、一种融合惯导和毫米波雷达的行人步态测量与识别方法,包括如下步骤:
4、使用移动设备上的毫米波雷达获取行人的微小运动特征数据;使用移动设备上的惯导传感器获取惯导数据;
5、分别对微小运动特征、惯导数据进行特征提取,然后进行特征融合,构建融合特征数据集,即步态数据集,其中特征标签为运动姿态;
6、利用步态数据集训练深度学习模型;
7、将新采集的微小运动特征数据、惯导数据输入训练好的深度学习模型中,得到对应的运动姿态。
8、优选的,根据微小运动特征数据构建横坐标为时间,纵坐标为速度的微多普勒图像,将微多普勒图像利用杂波对消器来抑制固定杂波,对消静止目标和低速目标,从而提取运动目标信号;对运动目标信号进行特征提取。
9、优选的,根据加速度数据、角速度数据构建横坐标为时间,纵坐标为加速度的加速度曲线图像;将加速度曲线图像x、y、z三个方向的数据进行融合,生成单组数据;对由单组数据构成的数据集进行特征提取。
10、优选的,所述惯导传感器包括加速度传感器和角速度传感器;对加速度以及角速度的x、y、z三个方向的分量进行加权求和,从而得出单组数据,具体公式为:
11、w=(w1*accx+w2*accy+w3*accz)/(w1+w2+w3)+(w4*gyrox+w5*gyroy
12、+w6*gyroz)/(w4+w5+w6)
13、其中,accx,accy,accz是加速度传感器在x、y、z三个方向上的分量数据;gyrox,gyroy,gyroz是角速度传感器在x、y、z三个方向上的分量数据;w1,w2,w3,w4,w5,w6是相应分量的权重,用于调整每个分量对最终结果的贡献度;(w1*accx+w2*accy+w3*accz)/(w1+w2+w3)是加速度分量的加权平均值;通过将每个分量与相应权重相乘,然后将结果相加并除以权重的总和,来得到加速度的加权平均值;(w4*gyrox+w5*gyroy+w6*gyroz)/(w4+w5+w6)是角速度分量的加权平均值,通过将每个分量与相应权重相乘,然后将结果相加并除以权重的总和,来得到角速度的加权平均值。
14、优选的,对微小运动特征数据特征、惯导数据特征进行融合的步骤包括:
15、1)建立状态方程和观测方程;
16、状态方程如下:
17、xk=f(xk-1,uk-1)+wk-1
18、其中,xk表示时刻k的步态数据状态向量;f()是状态转移函数,用于预测下一时刻步态数据状态;uk-1是控制输入向量,可能是前一时刻的步态数据;wk-1表示系统过程噪声,表示状态方程的不确定性;
19、观测方程如下:
20、zk=h(xk)+vk
21、其中,zk表示时刻k的步态数据;h()是观测函数,用于将步态数据状态映射到传感器测量空间;vk表示观测噪声,表示观测方程的不确定性;
22、2)进行初始化,设定初始的状态和协方差矩阵,用于开始滤波过程;并预测步态数据,预测步态数据状态的协方差矩阵如下:
23、
24、其中,pk表示时刻k的步态数据状态的协方差矩阵;ak-1是状态转移矩阵,用于线性化状态方程;qk-1表示过程噪声的协方差矩阵;
25、估计步态数据状态的协方差矩阵如下:
26、
27、其中,kk表示时刻k的卡尔曼增益矩阵,用于将预测值与测量值进行融合;hk是观测矩阵,用于线性化观测方程;rk表示观测噪声的协方差矩阵;
28、3)利用状态方程和上一时刻的状态预测当前步态数据的状态,并更新协方差矩阵;
29、更新步态数据状态和协方差矩阵如下:
30、xk=xk+kk(zk-h(xk))
31、pk=(i-kkhk)pk
32、其中,i是单位矩阵;
33、4)进行数据融合,将观测到的微小运动特征、惯导数据与预测的步态数据进行融合,得到校正后的步态数据估计,将协方差矩阵进行更新,根据融合后的数据,更新协方差矩阵,以反映估计值的不确定性;重复预测和更新步骤,持续迭代,以融合更多的数据点,不断优化步态数据估计。
34、优选的,所述深度学习模型为cnn。
35、有益效果:
36、1.准确性高:通过同时测量手机惯导和毫米波雷达的数据,并进行数据融合和强化学习,提高了步态识别的准确率。
37、2.鲁棒性强:通过强化学习模块,将已有的步态识别模型应用于新的环境或数据集,提高了步态识别的鲁棒性。
38、3.实时性好:系统实时采集和处理行人的步态数据,能够在短时间内进行识别和分类。
39、4.无需额外设备:利用手机内置的惯性传感器和毫米波雷达技术,无需行人额外佩戴传感器或使用专用设备。
40、5.应用广泛:适用于安全监控、人机交互等领域,具有广泛的应用前景。
技术特征:
1.一种融合惯导和毫米波雷达的行人步态测量与识别方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种融合惯导和毫米波雷达的行人步态测量与识别方法,其特征在于,根据微小运动特征数据构建横坐标为时间,纵坐标为速度的微多普勒图像,将微多普勒图像利用杂波对消器来抑制固定杂波,对消静止目标和低速目标,从而提取运动目标信号;对运动目标信号进行特征提取。
3.根据权利要求1所述的一种融合惯导和毫米波雷达的行人步态测量与识别方法,其特征在于,根据加速度数据、角速度数据构建横坐标为时间,纵坐标为加速度的加速度曲线图像;将加速度曲线图像x、y、z三个方向的数据进行融合,生成单组数据;对由单组数据构成的数据集进行特征提取。
4.根据权利要求3所述的一种融合惯导和毫米波雷达的行人步态测量与识别方法,其特征在于,所述惯导传感器包括加速度传感器和角速度传感器;对加速度以及角速度的x、y、z三个方向的分量进行加权求和,从而得出单组数据,具体公式为:
5.根据权利要求3所述的一种融合惯导和毫米波雷达的行人步态测量与识别方法,其特征在于,对微小运动特征数据特征、惯导数据特征进行融合的步骤包括:
6.根据权利要求1所述的一种融合惯导和毫米波雷达的行人步态测量与识别方法,其特征在于,所述深度学习模型为cnn。
技术总结
本发明涉及一种同时测量手机惯导和毫米波雷达的行人步态数据,并通过数据融合和强化学习对步态进行识别和分类的系统及方法。通过结合手机内置的惯性传感器和毫米波雷达技术,实时获取行人的步态信息,经过数据融合和强化学习算法的处理,提高步态识别的准确率和鲁棒性。本发明提供了一种可靠、高精度的行人步态识别方案,适用于安全监控、人机交互等领域。
技术研发人员:何家庆,施佳佳,朱翊晗,花冰,施佺,储柳,许致火,张永伟,郁正宇
受保护的技术使用者:南通大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!