一种用于康复的手部外骨骼
本发明涉及手部康复用外骨骼机器人,尤其涉及一种用于康复的手部外骨骼。
背景技术:
1、手的运动功能在人类日常生活中发挥巨大作用,一个人每天平均用手握紧张开的次数高达1500多次。而手部运动功能的受损,会显著限制患者可能执行的日常任务数量,影响到其生活质量,进而易产生心理疾病。
2、除拇指外,人的手指主要由三个部分构成:近节指骨、中节指骨和远节指骨。近节指骨和掌骨形成mcp(metacarp-phalangeal joint,掌指关节)关节,其有两个自由度可实现内收外展和屈曲伸展运动;中节指骨分别和近节指骨、远节指骨形成pip(proximalinter-phalangeal joint,近侧指间关节)和dip(distal inter-phalangeal joint,远侧指间关节)关节,它们仅有一个自由度用以支持屈曲伸展运动。dip关节和pip关节存在高度耦合性,表现为dip关节会伴随pip关节发生运动。拇指cmc(carpometacarpal joint,腕掌关节)关节具有内收外展、屈曲伸展和对掌三个自由度,mcp和ip(inter-phalangealjoint,指间关节)关节则分别只有一个屈曲伸展自由度。
3、目前应用于手部康复的外骨骼机器人都是专注于使用频率最高的单一自由度,即整个手指的屈曲或者伸展这一运动。大多数手部康复机器人只能对手指进行屈曲或者伸展的康复训练,这就导致现有的手部康复机器人不能够精准单独辅助某一个单关节或者不同手指上的多个单关节。从而使得现有的手部康复机器人不能较好地适应不同患者的对手指关节不同的康复需求,且不能达到在不同康复阶段中都能介入并进行辅助康复的效果。
技术实现思路
1、本发明的目的在于提出一种用于康复的手部外骨骼,该用于康复的手部外骨骼能够较好适应不同患者的对手指关节不同的康复需求,达到在不同康复阶段中都能介入并进行辅助康复的效果。
2、为实现上述技术效果,本发明的技术方案如下:
3、本发明公开了一种用于康复的手部外骨骼,包括:基座,所述基座用于穿戴于掌骨的伸展侧;驱动机构,所述驱动机构设在所述基座上,且包括至少一个驱动单元;指骨套,所述指骨套穿戴于指骨的伸展侧,所述指骨套为至少一个,所述指骨套与所述驱动单元传动连接;其中,所述驱动单元能够驱动所述指骨套转动以辅助所述指骨屈曲或者伸展。
4、在一些实施例中,所述指骨套包括近指骨套和中指骨套,所述近指骨套穿戴于所述指骨的近节指骨,所述中指骨套穿戴于所述指骨的中节指骨;所述驱动机构包括第一驱动单元和第二驱动单元,所述第一驱动单元与所述近指骨套传动配合,所述第二驱动单元与中指骨套传动配合。
5、在一些具体的实施例中,所述第一驱动单元包括第一驱动源、第一驱动连杆以及第一传动连杆;其中:所述第一驱动源的输出轴与所述第一驱动连杆的一端相连,所述第一驱动连杆的另一端与所述第一传动连杆的一端相连,所述第一传动连杆的另一端与所述近指骨套可转动连接。
6、在一些更具体的实施例中,所述第一驱动连杆包括第一杆和第二杆,所述第一杆的一端与所述第一驱动单元的输出轴配合,所述第一杆的另一端与所述第二杆的一端可转动连接,且所述第二杆相对第一杆的转动轴线与所述第一驱动单元的输出轴的转动轴线垂直设置,所述第二杆的另一端与所述第一传动连杆相连。
7、在一些更具体的实施例中,所述第一驱动连杆与所述第一传动连杆通过第一转动销轴相连,且所述第一转动销轴上设有第一角度检测装置,以测量所述第一驱动连杆和所述第一传动连杆之间的相对转动角度信息。
8、在一些具体的实施例中,所述第二驱动单元包括第二驱动源、绕线滑轮、腱绳、第二驱动连杆以及第二传动连杆,第二驱动源的输出轴与所述绕线滑轮相连,所述第二传动连杆的一端与所述中指骨套可转动连接,所述第二传动连杆的另一端与所述第二驱动连杆的一端相连,所述腱绳与所述绕线滑轮及所述第二驱动连杆的另一端配合,且所述第二驱动连杆的另一端可转动地连接于所述近指骨套;其中:第二驱动源驱动所述绕线滑轮转动时,所述腱绳能够带动所述第二驱动连杆转动。
9、在一些更具体的实施例中,所述第二驱动连杆与所述第二传动连杆通过第二转动销轴相连,且所述第二转动销轴上设有第二角度检测装置,以测量所述第二驱动连杆和所述第二传动连杆之间的相对转动角度信息。
10、在一些具体的实施例中,所述近指骨套和所述中指骨套上均设有固定槽,所述近指骨套和所述中指骨套通过穿过所述固定槽的绑缚带分别与所述近节指骨以及中节指骨连接。
11、在一些实施例中,所述的用于康复的手部外骨骼还包括固定套,所述固定套套设于所述掌骨。
12、在一些具体的实施例中,所述固定套上设有多个基座,以实现所述用于康复的手部外骨骼能够与多个手指配合。
13、本发明实施例的用于康复的手部外骨骼的有益效果:在实际工作过程中,驱动单元能够驱动指骨套转动以辅助指骨屈曲或者伸展,当指骨套为多个时,采用多个独立的驱动单元实现多个指骨套的独立驱动,每个指骨套单独使用一个驱动单元驱动,在实际恢复中,可以根据患者对手指关节不同的康复需求,设置指骨套以及驱动单元的数量,例如,可以设置多个指骨套在同一个手指上,实现掌指关节、近侧指间关节的辅助康复,也可以在两个或者三个不同的手指的掌指关节、近侧指间关节的辅助康复,使得该用于康复的手部外骨骼能够较好适应不同患者的对手指关节不同的康复需求,达到在不同康复阶段中都能介入并进行辅助康复的效果。由于用于康复的手部外骨骼穿戴在手掌的伸展侧,即手背侧,最大程度保留了人体手部的生理触觉,有利于康复恢复。
14、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种用于康复的手部外骨骼,其特征在于,包括:
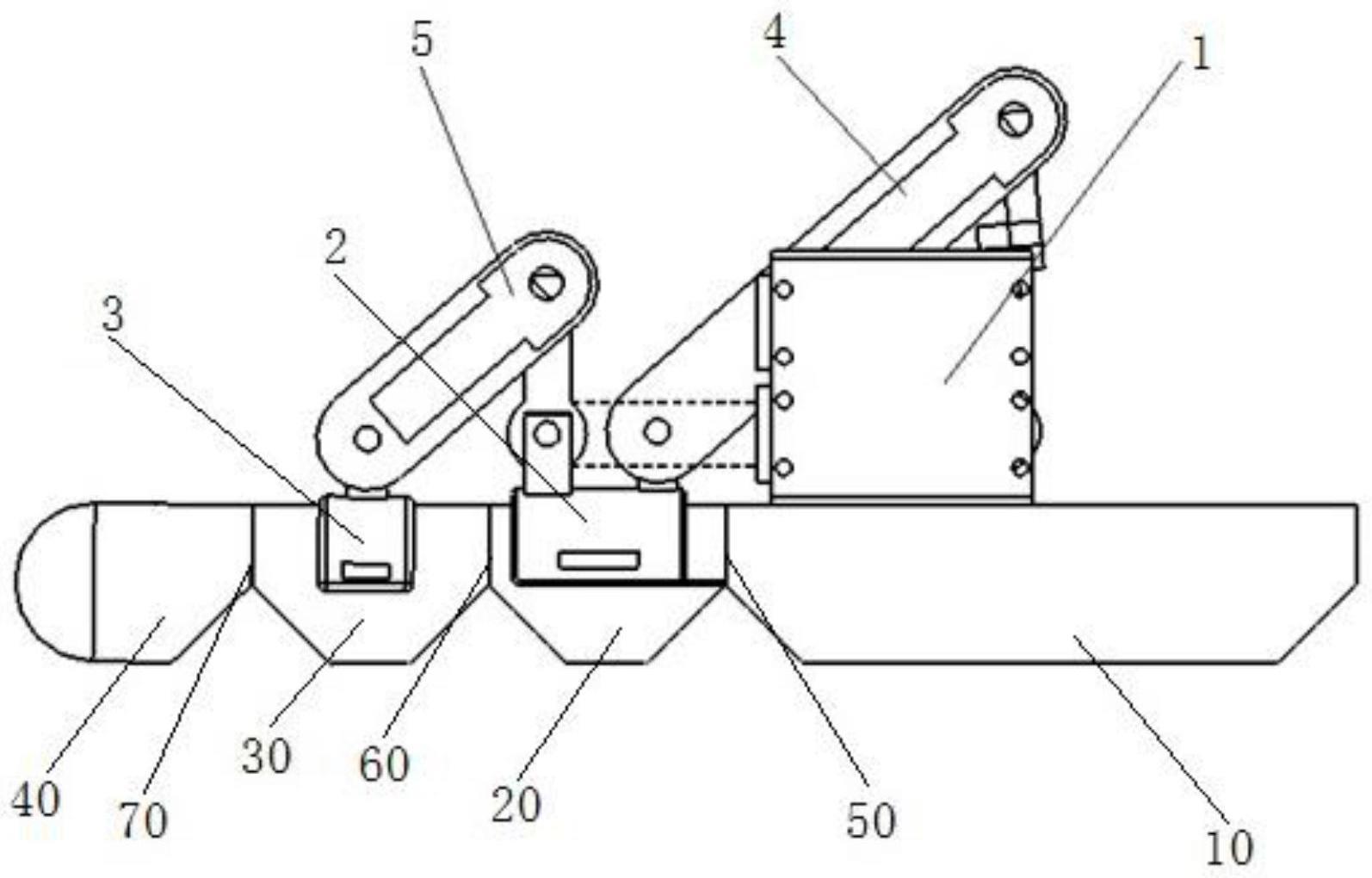
2.根据权利要求1所述的用于康复的手部外骨骼,其特征在于,所述指骨套包括近指骨套(2)和中指骨套(3),所述近指骨套(2)穿戴于所述指骨的近节指骨(20),所述中指骨套(3)穿戴于所述指骨的中节指骨(30);
3.根据权利要求2所述的用于康复的手部外骨骼,其特征在于,所述第一驱动单元(4)包括第一驱动源(41)、第一驱动连杆以及第一传动连杆(44);其中:
4.根据权利要求3所述的用于康复的手部外骨骼,其特征在于,所述第一驱动连杆包括第一杆(42)和第二杆(43),所述第一杆(42)的一端与所述第一驱动单元(4)的输出轴配合,所述第一杆(42)的另一端与所述第二杆(43)的一端可转动连接,且所述第二杆(43)相对所述第一杆(42)的转动轴线与所述第一驱动单元(4)的输出轴的转动轴线垂直设置,所述第二杆(43)的另一端与所述第一传动连杆(44)相连。
5.根据权利要求3所述的用于康复的手部外骨骼,其特征在于,所述第一驱动连杆与所述第一传动连杆(44)通过第一转动销轴相连,且所述第一转动销轴上设有第一角度检测装置(45),以测量所述第一驱动连杆和所述第一传动连杆(44)之间的相对转动角度信息。
6.根据权利要求2所述的用于康复的手部外骨骼,其特征在于,所述第二驱动单元(5)包括第二驱动源(51)、绕线滑轮(52)、腱绳、第二驱动连杆(55)以及第二传动连杆(56),第二驱动源(51)的输出轴与所述绕线滑轮(52)相连,所述第二传动连杆(56)的一端与所述中指骨套(3)可转动连接,所述第二传动连杆(56)的另一端与所述第二驱动连杆(55)的一端相连,所述腱绳与所述绕线滑轮(52)及所述第二驱动连杆(55)的另一端配合,且所述第二驱动连杆(55)的另一端可转动地连接于所述近指骨套(2);
7.根据权利要求6所述的用于康复的手部外骨骼,其特征在于,所述第二驱动连杆(55)与所述第二传动连杆(56)通过第二转动销轴相连,且所述第二转动销轴上设有第二角度检测装置(57),以测量所述第二驱动连杆(55)和所述第二传动连杆(56)之间的相对转动角度信息。
8.根据权利要求2所述的用于康复的手部外骨骼,其特征在于,所述近指骨套(2)和所述中指骨套(3)上均设有固定槽,所述近指骨套(2)和所述中指骨套(3)通过穿过所述固定槽的绑缚带分别与所述近节指骨(20)以及所述中节指骨(30)连接。
9.根据权利要求1所述的用于康复的手部外骨骼,其特征在于,还包括固定套,所述固定套套设于所述掌骨(10)。
10.根据权利要求9所述的用于康复的手部外骨骼,其特征在于,所述固定套上设有多个基座(1),以实现所述用于康复的手部外骨骼能够与多个手指配合。
技术总结
本发明公开了一种用于康复的手部外骨骼,用于康复的手部外骨骼包括基座、驱动机构和指骨套,基座用于穿戴于掌骨的伸展侧,驱动机构设在基座上,且包括至少一个驱动单元,指骨套穿戴于指骨的伸展侧,指骨套为至少一个,指骨套与驱动单元传动连接,驱动单元能够驱动指骨套转动以辅助指骨屈曲或者伸展。该用于康复的手部外骨骼能够较好适应不同患者的对手指关节不同的康复需求,达到在不同康复阶段中都能介入并进行辅助康复的效果。
技术研发人员:雍旭,景晓蓓,舒柏瑞,孙振羽,张新宇,横井浩史,李光林
受保护的技术使用者:中国科学院深圳先进技术研究院
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!