基于毫米波雷达进行自动就位的手术机器人的制作方法
本公开涉及机器人控制领域,尤其涉及一种基于毫米波雷达进行自动就位的手术机器人。
背景技术:
1、随着自动化技术的不断发展,在手术机器人领域,人机协同手术或自动化手术是一个发展方向。在一些作业中,需要手术机器人基于手术对象的位姿和所处环境(例如手术室)规划运动路径,并沿运动路运动至目标位姿,以实现手术机器人的自动就位。通过使手术机器人自动就位,可以加快手术的前期准备工作,改善医护人员的工作强度。
2、通常,可以使用激光雷达等感测设备构建环境地图,由计算机控制机器人自主运动至作业区域以执行作业。然而,激光雷达存在激光容易损伤人体眼球组织伤,或是损坏手术室内设置的显示屏或成像装置上搭载的成像传感器等技术问题,因此不适用于手术环境。此外,激光雷达还存在价格昂贵、易受手术室内环境光干扰等问题。
技术实现思路
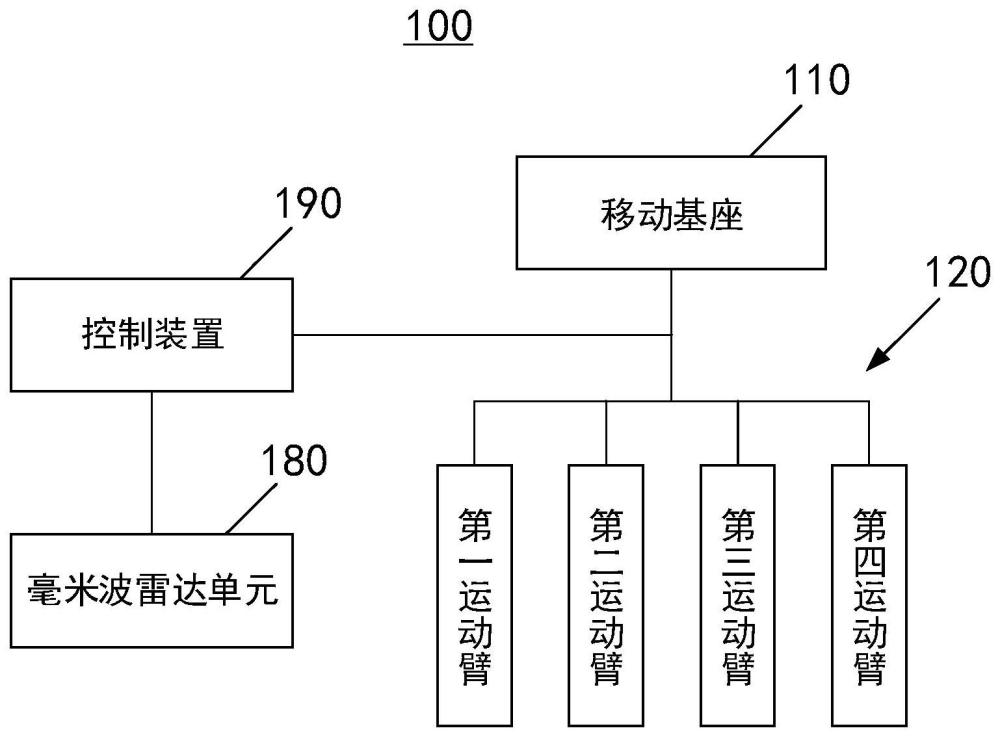
1、在一些实施例中,本公开提供了一种基于毫米波雷达进行自动就位的手术机器人,包括移动基座;至少一个运动臂,设置在移动基座上;毫米波雷达单元,设置在移动基座或至少一个运动臂上,毫米波雷达单元用于向手术室内发射电磁波并接收由手术室内的物体反射的电磁波,以生成雷达信号;以及控制装置,与移动基座、至少一个运动臂和毫米波雷达单元连接,配置为:基于雷达信号,生成与手术室相关的点云数据;基于点云数据,生成用于手术机器人向手术室中的手术作业区域运动的运动路径;以及控制手术机器人沿运动路径运动。
技术特征:
1.一种手术机器人,其特征在于,包括:
2.根据权利要求1所述的手术机器人,其特征在于,所述控制装置还配置为:
3.根据权利要求2所述的手术机器人,其特征在于,所述控制装置还配置为:
4.根据权利要求2或3所述的手术机器人,其特征在于,所述手术室内的物体包括位于手术作业区域中的患者或手术台,所述控制装置还配置为:
5.根据权利要求2或3所述的手术机器人,其特征在于,
6.根据权利要求5所述的手术机器人,其特征在于,所述毫米波雷达单元是4d毫米波雷达单元,并且所述控制装置还配置为:
7.根据权利要求6所述的手术机器人,其特征在于,
8.根据权利要求6所述的手术机器人,其特征在于,所述控制装置还配置为:
9.根据权利要求8所述的手术机器人,其特征在于,
10.根据权利要求5所述的手术机器人,其特征在于,
11.根据权利要求10所述的手术机器人,其特征在于,
12.根据权利要求11所述的手术机器人,其特征在于,
13.根据权利要求5所述的手术机器人,其特征在于,
14.根据权利要求13所述的手术机器人,其特征在于,
15.根据权利要求5所述的手术机器人,其特征在于,
16.根据权利要求5所述的手术机器人,其特征在于,所述手术室内的物体包括位于手术作业区域中的患者或手术台,
17.根据权利要求1所述的手术机器人,其特征在于,
18.根据权利要求17所述的手术机器人,其特征在于,
技术总结
本公开涉及机器人控制领域,公开一种基于毫米波雷达进行自动就位的手术机器人,包括移动基座;至少一个运动臂,设置在移动基座上;毫米波雷达单元,设置在移动基座或至少一个运动臂上,毫米波雷达单元用于向手术室内发射电磁波并接收由手术室内的物体反射的电磁波,以生成雷达信号;以及控制装置,与移动基座、至少一个运动臂和毫米波雷达单元连接,配置为:基于雷达信号,生成与手术室相关的点云数据;基于点云数据,生成用于手术机器人向手术室中的手术作业区域运动的运动路径;以及控制手术机器人沿运动路径运动。
技术研发人员:徐凯,陈煜阳,张钰林,赵江然,姬利永,张宇
受保护的技术使用者:北京术锐机器人股份有限公司
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!