一种线驱动的膝关节外骨骼机器人的制作方法
本发明涉医疗训练机器人,具体涉及一种线驱动的膝关节外骨骼机器人。
背景技术:
1、外骨骼是一种穿戴在使用者身体外部的一种助力装置,通过电机、液压泵等为各关节提供动力,将人机系统重力通过外骨骼机械腿传至地面,为穿戴者行走等运动提供动力辅助和保护支撑等功能,它融合了传感、信号采集、步态识别、运动控制等关键技术,使外骨骼能够帮助穿戴者完成保护支撑、行走助力等功能。现有的各类外骨骼,通常都采用刚性的支架与人体结合,采用驱动机构驱动刚性的支架来达到辅助人体运动的目的。
2、但是人体的关节不是机械的转动机构,由于人体关节转动的中心始终是变化的,因此刚性的支架会存在较多问题,容易造成对人体运动的阻碍。并且常见的外骨骼驱动机构由于集成到刚性的支架上,从而造成支架重量较大,对人体造成负担。
技术实现思路
1、本发明的目的是提供一种线驱动的膝关节外骨骼机器人,以解决现有技术中刚性支架机械式的转动容易对人体关节的运动造成阻碍的问题。
2、为实现上述目的,本发明采取以下技术方案:
3、本发明提供一种线驱动的膝关节外骨骼机器人,包括:
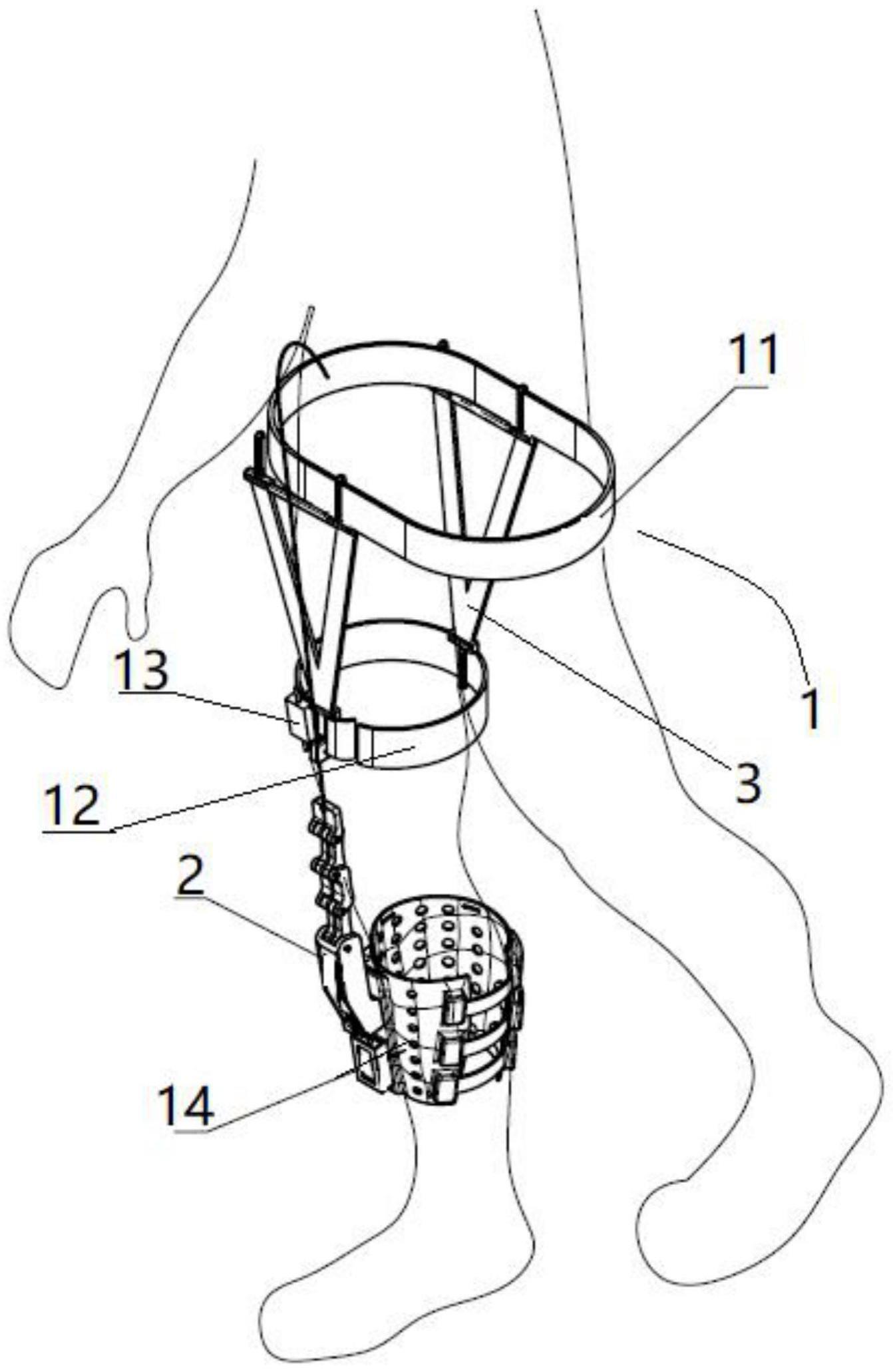
4、穿戴机构,所述穿戴机构包括腰带、大腿绑带、大腿挂件以及小腿绑带,所述腰带和所述大腿绑带之间设有牵引带连接,所述大腿挂件固定在所述大腿绑带上;
5、开放式连续机构,所述开放式连续机构包括链节组件、柔性丝以及力传感器,所述链节组件对应膝关节位置,包括自所述小腿绑带至所述大腿绑带方向依次铰接的第一链节、若干第二链节以及第三链节,所述第一链节的非铰接端与所述小腿绑带固定,所述柔性丝的一端依次穿过第一链节、若干第二链节、第三链节以及大腿挂件后外接驱动装置,所述力传感器固定在所述第一链节的非铰接端上,且所述柔性丝的另一端与所述力传感器相连接。
6、进一步地,依次铰接的多个所述第二链节分为交错连接的窄链节和宽链节,所述宽链节的两端分别开设有供相邻所述窄链节端部置入并铰接的第一装配槽,所述第二链节的侧视结构呈“c”型结构,在所述第二链节的凹面上沿其长度方向开设有供所述柔性丝顺型穿过的第一丝槽,使所述第二链节的凸面侧构成转动侧。
7、进一步地,所述第二链节的侧视结构呈两端向外斜向设置的“c”型结构,使所述宽链节的端部外斜面上开设所述第一装配槽,所述窄链节的端部外斜面与对应铰接的第一装配槽槽底面构成转动接触后的转动限位点。
8、进一步地,所述第一链节的底端与所述小腿绑带相连接,在所述第一链节的顶端开设有供相邻所述窄链节底端置入并铰接的第二装配槽,且该所述窄链节底端的端部外斜面与所述第二装配槽的槽底面构成转动接触后的转动限位点,另在所述第一链节远离所述小腿绑带的外侧面上纵向开设有集成槽,在所述集成槽内的底部固接有所述力传感器,并在所述集成槽内的中部槽面上沿其长度方向开设有供所述柔性丝顺型穿过的第二丝槽,所述第二丝槽的顶端位于所述第二装配槽内的槽底面上形成有第一穿丝限位孔,其中,所述第一链节的底端沿水平方向一体形成有连接凸起,所述连接凸起与所述小腿绑带相连接,使所述第一链节与所述小腿绑带之间形成有活动间隙。
9、进一步地,所述第三链节的侧视结构呈底端向外斜向设置的“l”型结构,在所述第三链节的凹面上沿其长度方向开设有供所述柔性丝顺型穿过的第三丝槽,使所述第三链节的凸面侧构成转动侧,并在所述第三链节底端的外斜面上开设有供相邻所述窄链节顶端置入并铰接的第三装配槽,使该所述窄链节顶端的端部外斜面与所述第三装配槽的槽底面构成转动接触后的转动限位点。
10、进一步地,所述第三链节的凹面上位于所述第三丝槽顶端的外侧固接有弧形限位板,使所述弧形限位板与所述第三丝槽围成封闭式的第二穿丝限位孔,其中,所述第一丝槽、第二丝槽以及第三丝槽的横截面均为弧形结构。
11、进一步地,所述开放式连续机构还包括鲍登线管,在所述大腿挂件上一体形成有限位凸起,所述限位凸起上开设有沿纵向贯穿所述限位凸起的纵向通孔,且所述纵向通孔的顶端位于所述限位凸起的顶面上形成有沉孔,所述鲍登线管的一端插接在所述沉孔内,且所述鲍登线管的另一端与外设驱动装置固定,所述柔性丝远离所述力传感器的一端依次穿设在所述链节组件、纵向通孔以及鲍登线管内并与外设驱动装置的驱动部件连接,其中,所述鲍登线管包括内衬管以及套在所述内衬管上的鲍登线套。
12、进一步地,所述穿戴机构还包括腰部挂件,所述腰部挂件包括第一水平挂件和若干个一体成型在所述第一水平挂件上的第一纵向挂件,所述第一纵向挂件上形成有供所述腰带横向穿过的第一竖孔,所述第一水平挂件的两端分别形成有第一横孔;
13、所述大腿挂件呈“t”型结构,包括第二水平挂件和第二纵向挂件,所述第二纵向挂件上形成有供所述大腿绑带横向穿过的第二竖孔,所述第二水平挂件的中部形成有第二横孔;
14、所述牵引带为穿设在所述第一横孔和所述第二横孔上的环形弹性带,且两个所述第一横孔上分别穿设有一条所述牵引带。
15、进一步地,所述腰部挂件、所述大腿挂件以及两条所述牵引带构成一组牵引机构,所述穿戴机构包括相对设置的两组牵引机构,且其中一组所述牵引机构与所述链节组件同侧布置,其中,所述大腿绑带上安装有大腿位置传感器。
16、进一步地,所述小腿绑带的外带面上固接有卡扣,并在所述卡扣的一侧设有扣条,所述扣条的一端固接在所述小腿绑带的外带面上,且所述扣条的另一端用于水平推入所述卡扣内构成锁紧机构,其中,所述小腿绑带上安装有小腿位置传感器。
17、本发明由于采取以上技术方案,其具备以下有益效果:
18、设置穿戴机构和开放式连续机构两部份,通过外设驱动装置拉紧柔性丝,使链节组件的多个链节呈现直立转态,从而为使用者提供伸腿的助立,并便于使用者处于直立状态,而当使用者屈腿时,柔性丝在外设驱动装置的释放下,使链节组件的多个链节可以自由弯曲,从而辅助使用者的膝关节弯曲,相较于刚性支架的机械转动,多个链节的自由弯曲更贴近人体关节的运动,有效提高辅助人体运动的效率,同时利用腰带、大腿绑带以及小腿绑带之间的连接结构,能够提高膝关节外骨骼机器人穿戴后的紧凑性,避免膝关节外骨骼机器人容易松脱的情况。
技术特征:
1.一种线驱动的膝关节外骨骼机器人,其特征在于,所述膝关节外骨骼机器人包括:
2.根据权利要求1所述的一种线驱动的膝关节外骨骼机器人,其特征在于:依次铰接的多个所述第二链节分为交错连接的窄链节和宽链节,所述宽链节的两端分别开设有供相邻所述窄链节端部置入并铰接的第一装配槽,所述第二链节的侧视结构呈“c”型结构,在所述第二链节的凹面上沿其长度方向开设有供所述柔性丝顺型穿过的第一丝槽,使所述第二链节的凸面侧构成转动侧。
3.根据权利要求2所述的一种线驱动的膝关节外骨骼机器人,其特征在于:所述第二链节的侧视结构呈两端向外斜向设置的“c”型结构,使所述宽链节的端部外斜面上开设所述第一装配槽,所述窄链节的端部外斜面与对应铰接的第一装配槽槽底面构成转动接触后的转动限位点。
4.根据权利要求3所述的一种线驱动的膝关节外骨骼机器人,其特征在于:所述第一链节的底端与所述小腿绑带相连接,在所述第一链节的顶端开设有供相邻所述窄链节底端置入并铰接的第二装配槽,且该所述窄链节底端的端部外斜面与所述第二装配槽的槽底面构成转动接触后的转动限位点,另在所述第一链节远离所述小腿绑带的外侧面上纵向开设有集成槽,在所述集成槽内的底部固接有所述力传感器,并在所述集成槽内的中部槽面上沿其长度方向开设有供所述柔性丝顺型穿过的第二丝槽,所述第二丝槽的顶端位于所述第二装配槽内的槽底面上形成有第一穿丝限位孔,其中,所述第一链节的底端沿水平方向一体形成有连接凸起,所述连接凸起与所述小腿绑带相连接,使所述第一链节与所述小腿绑带之间形成有活动间隙。
5.根据权利要求4所述的一种线驱动的膝关节外骨骼机器人,其特征在于:所述第三链节的侧视结构呈底端向外斜向设置的“l”型结构,在所述第三链节的凹面上沿其长度方向开设有供所述柔性丝顺型穿过的第三丝槽,使所述第三链节的凸面侧构成转动侧,并在所述第三链节底端的外斜面上开设有供相邻所述窄链节顶端置入并铰接的第三装配槽,使该所述窄链节顶端的端部外斜面与所述第三装配槽的槽底面构成转动接触后的转动限位点。
6.根据权利要求5所述的一种线驱动的膝关节外骨骼机器人,其特征在于:所述第三链节的凹面上位于所述第三丝槽顶端的外侧固接有弧形限位板,使所述弧形限位板与所述第三丝槽围成封闭式的第二穿丝限位孔,其中,所述第一丝槽、第二丝槽以及第三丝槽的横截面均为弧形结构。
7.根据权利要求5所述的一种线驱动的膝关节外骨骼机器人,其特征在于:所述开放式连续机构还包括鲍登线管,在所述大腿挂件上一体形成有限位凸起,所述限位凸起上开设有沿纵向贯穿所述限位凸起的纵向通孔,且所述纵向通孔的顶端位于所述限位凸起的顶面上形成有沉孔,所述鲍登线管的一端插接在所述沉孔内,且所述鲍登线管的另一端与外设驱动装置固定,所述柔性丝远离所述力传感器的一端依次穿设在所述链节组件、纵向通孔以及鲍登线管内并与外设驱动装置的驱动部件连接,其中,所述鲍登线管包括内衬管以及套在所述内衬管上的鲍登线套。
8.根据权利要求1或7所述的一种线驱动的膝关节外骨骼机器人,其特征在于:所述穿戴机构还包括腰部挂件,所述腰部挂件包括第一水平挂件和若干个一体成型在所述第一水平挂件上的第一纵向挂件,所述第一纵向挂件上形成有供所述腰带横向穿过的第一竖孔,所述第一水平挂件的两端分别形成有第一横孔;
9.根据权利要求8所述的一种线驱动的膝关节外骨骼机器人,其特征在于:所述腰部挂件、所述大腿挂件以及两条所述牵引带构成一组牵引机构,所述穿戴机构包括相对设置的两组牵引机构,且其中一组所述牵引机构与所述链节组件同侧布置,其中,所述大腿绑带上安装有大腿位置传感器。
10.根据权利要求1所述的一种线驱动的膝关节外骨骼机器人,其特征在于:所述小腿绑带的外带面上固接有卡扣,并在所述卡扣的一侧设有扣条,所述扣条的一端固接在所述小腿绑带的外带面上,且所述扣条的另一端用于水平推入所述卡扣内构成锁紧机构,其中,所述小腿绑带上安装有小腿位置传感器。
技术总结
本发明涉及一种线驱动的膝关节外骨骼机器人,包括穿戴机构和开放式连续机构,穿戴机构包括腰带、大腿绑带以及小腿绑带,腰带和大腿绑带之间设有牵引带连接,开放式连续机构包括链节组件、柔性丝以及力传感器,链节组件包括依次铰接的第一链节、若干第二链节以及第三链节,第一链节与小腿绑带固定,柔性丝的一端依次穿过第一链节、若干第二链节、第三链节以及大腿绑带后外接驱动装置,力传感器固定在第一链节上,且柔性丝的另一端与力传感器相连接。本发明利用柔性丝在外设驱动装置的拉紧或释放后,控制链节组件的多个链节呈现直立或能够自由弯曲的状态,使链节组件构成多自由度结构,从而适配人体关节的运动,有效提高辅助人体运动的效率。
技术研发人员:阮乐成,周志浩,周亚雷,王启宁
受保护的技术使用者:北京通用人工智能研究院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!