一种手术导航定位系统的配准方法及其系统与流程
本发明涉及一种手术设备中的配准方法及系统,尤其涉及一种基于c臂透视成像原理的手术导航定位系统的配准方法。
背景技术:
1、手术导航定位系统因其可以在术中通过规划引导机械臂进行定位,实时观察手术器械位置的特性而在临床上应用越来越广泛,其原理是以患者的透视影像学资料为数据源建立图像坐标系,以光学定位系统为数据源建立空间坐标系,计算由空间坐标系向图像坐标系的转换,即配准,从而达到在手术中实时跟踪获取手术器械位置的目的。
2、配准是手术导航定位系统使用过程中必不可少的关键步骤,传统的配准方法多以机械臂举着配准靶在成像范围内成像,通过图像识别的方式完成配准。术中扫描过程中,安装有配准靶的机械臂参与其中,摆位非常不方便,严重制约术式的开展,且术中每张透视图像上都有多个定位点,对手术也会产生干扰。
3、中国专利cn113081265a公开了一种手术导航系统的配准方法,其配准方法依赖于术前的标定对象的第二运动轨迹及基于第二运动轨迹预先计算的图像数据与运动轨迹坐标之间的空间转换关系矩阵,同时还需要获取术中对象的第一运动轨迹坐标。上述方法实质上是利用转换关系矩阵和运动轨迹进行配准,运动轨迹中包含了大量连续的点坐标值,基于运动轨迹建立的转换关系矩阵同样计算量巨大,导致配准的步骤增多,速度降低,增加了术中实时跟踪获取手术器械位置的难度。
技术实现思路
1、发明目的:本发明的目的是提供一种手术导航定位系统的配准方法,解决了现有配准方法数据存储量和计算量大、配准速度慢且步骤繁多的问题。本发明的另一目的在于提出一种手术导航定位系统,解决现有手术导航定位系统在配准时需要在术中安装配准靶导致的摆位不便且干扰透视图像观察的问题。
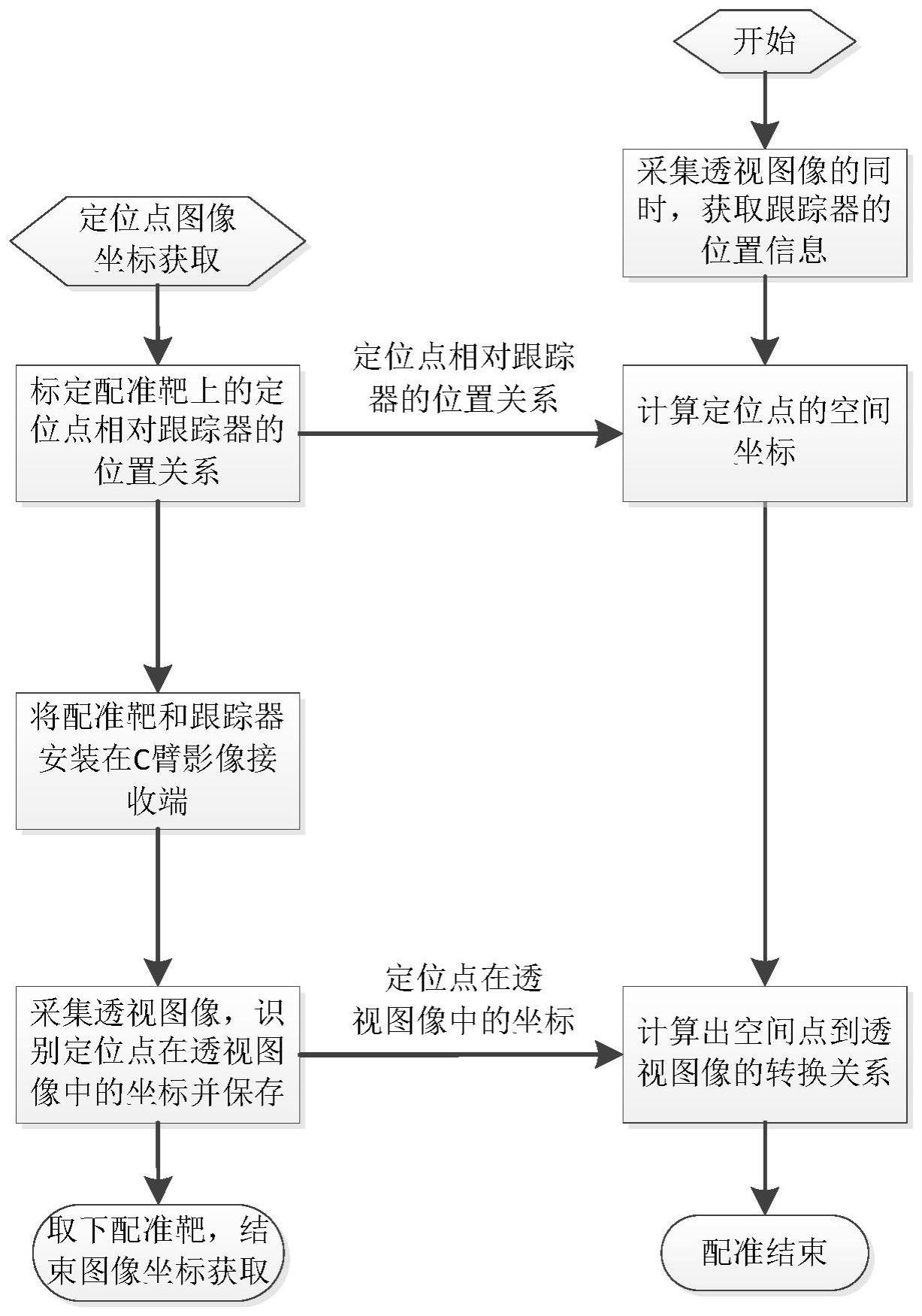
2、技术方案:本发明所述一种手术导航定位系统的配准方法,包含如下步骤:
3、(1)标定定位点与跟踪器之间的位置关系;
4、(2)根据术前采集的透视图像识别定位点在透视图像中的坐标;
5、(3)术中获取跟踪器的位置信息,基于步骤(1)中标定的定位点与跟踪器之间的位置关系,根据跟踪器的位置信息计算定位点的空间坐标;
6、(4)根据所述定位点的空间坐标和定位点在透视图像中的坐标,计算空间点到透视图像的转换关系完成配准。
7、本发明中的配准方法结合术前标定的配准靶上定位点与跟踪器之间的位置关系及透视图像上识别的定位点的坐标,计算出空间点到透视图像的转换关系,仅通过获取点坐标值就可以完成配准。
8、优选地,所述步骤(1)的具体方法为:术前通过三坐标测量机标定定位点与跟踪器之间的位置关系。
9、优选地,所述步骤(2)中透视图像的采集方法为:将配准靶安装于x射线设备的影像接收端,所述配准靶上设有定位点,保证配准靶上的所有定位点都在成像范围内且透视图像不重合,采集透视图像。
10、本发明中所述的手术定位导航系统,包括x射线设备、跟踪器、设有定位点的配准靶和计算机设备;
11、所述x射线设备用于采集透视图像;
12、所述跟踪器设于所述x射线设备的x射线接收端,所述跟踪器用于在术中辅助计算定位点的空间坐标;
13、所述设有定位点的配准靶仅在术前采集透视图像时安装于x射线设备的影像接收端;所述设有定位点的配准靶用于辅助定位点在透视图像中成像;术前采集透视图像后取下带有定位点的配准靶,避免了配准靶在手术空间上的阻挡和定位点在术中透视图像上的干扰。
14、所述计算机设备包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时完成上述的配准方法。
15、优选地,所述定位点为在x光下清晰显影的球状物。
16、优选地,所述x射线设备为c形臂x光机。
17、优选地,所述定位点的个数至少为六个。所述定位点对称设于配准靶的上表面和下表面。
18、优选地,所述跟踪器主体外侧分布有至少三个反射球,任意三个反射球不共线。
19、优选地,所述反射球的个数为3-12个。
20、有益效果:与现有技术相比,本发明具有如下显著优点:本发明中的配准方法与c臂x光机和手术导航定位系统配合工作,配准速度快,过程简便,引导图像清晰无干扰。本发明中的手术导航定位系统在术中扫描过程中无需安装托举配准靶,透视图像中不存在定位点的干扰,便于术式的开展。
技术特征:
1.一种手术导航定位系统的配准方法,其特征在于,包含如下步骤:
2.根据权利要求1所述手术导航定位系统的配准方法,其特征在于,步骤(1)中所述标定方法为:术前通过三坐标测量机标定定位点与跟踪器之间的位置关系。
3.根据权利要求2所述手术导航定位系统的配准方法,其特征在于,步骤(2)中所述透视图像的采集方法为:将配准靶安装于x射线设备的影像接收端,所述配准靶上设有定位点,使配准靶上的所有定位点都在成像范围内且透视图像不重合,采集透视图像。
4.一种手术定位导航系统,其特征在于,包括x射线设备、跟踪器、设有定位点的配准靶和计算机设备;
5.根据权利要求4所述手术定位导航系统,其特征在于,所述定位点为在x光下清晰显影的球状物。
6.根据权利要求5所述手术定位导航系统,其特征在于,所述定位点的个数至少为六个。
7.根据权利要求4所述手术定位导航系统,其特征在于,所述定位点对称设于配准靶的上表面和下表面。
8.根据权利要求4所述手术定位导航系统,其特征在于,所述x射线设备为c形臂x光机。
9.根据权利要求4所述手术定位导航系统,其特征在于,所述跟踪器主体外侧分布有至少三个反射球,任意三个反射球不共线。
10.根据权利要求8所述手术定位导航系统,其特征在于,所述反射球的个数为3-12个。
技术总结
本发明公开了一种手术导航定位系统的配准方法及其系统,配准方法包含如下步骤:(1)标定定位点与跟踪器之间的位置关系;(2)根据术前采集的透视图像识别定位点在透视图像中的坐标;(3)术中获取跟踪器的位置信息,基于步骤(1)中标定的定位点与跟踪器之间的位置关系,根据跟踪器的位置信息计算定位点的空间坐标;(4)根据所述定位点的空间坐标和定位点在透视图像中的坐标,计算空间点到透视图像的转换关系完成配准。本发明中的手术定位导航系统,包括X射线设备、跟踪器、设有定位点的配准靶和执行上述配准方法的计算机设备;配准方法与C臂X光机和手术导航定位系统配合工作,配准速度快,过程简便,引导图像清晰无干扰。
技术研发人员:刘金虎,陈圣国
受保护的技术使用者:南京普爱医疗设备股份有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!