一种电生理实时定位的脑深部电极自动植入系统
本发明涉及脑深部电极植入,具体地说,涉及一种电生理实时定位的脑深部电极自动植入系统。
背景技术:
1、随着医疗技术的发展,脑深部电极植入是治疗运动障碍和神经精神疾病等脑部相关疾病的一种关键手段,外科医生在电极植入过程中借助于电生理监测信号对最终植入位置进行人为判断。在这个过程中,穿刺靶点、穿刺路径、最终植入深度等与术后效果直接相关的关键因素的选择都是由外科医生根据经验决定。但是,因为脑深部结构复杂,手术人员准确定位脑深部目标区域的难度较大,在对头部进行穿刺过程中,整个电极植入过程则是由外科医生借助工具及手术器械完成,其植入精度的系统误差和随机误差均较大,出现人为错误的几率也较高,穿刺路径偏离规划路径时,手术人员难以及时发现调整,导致电极植入脑深部位置偏移,使治疗效果欠佳。
2、为了应对上述问题,我们提出一种电生理实时定位的脑深部电极自动植入系统。
技术实现思路
1、本发明的目的在于提供电生理实时定位的脑深部电极自动植入系统,以解决上述背景技术中提出的问题。
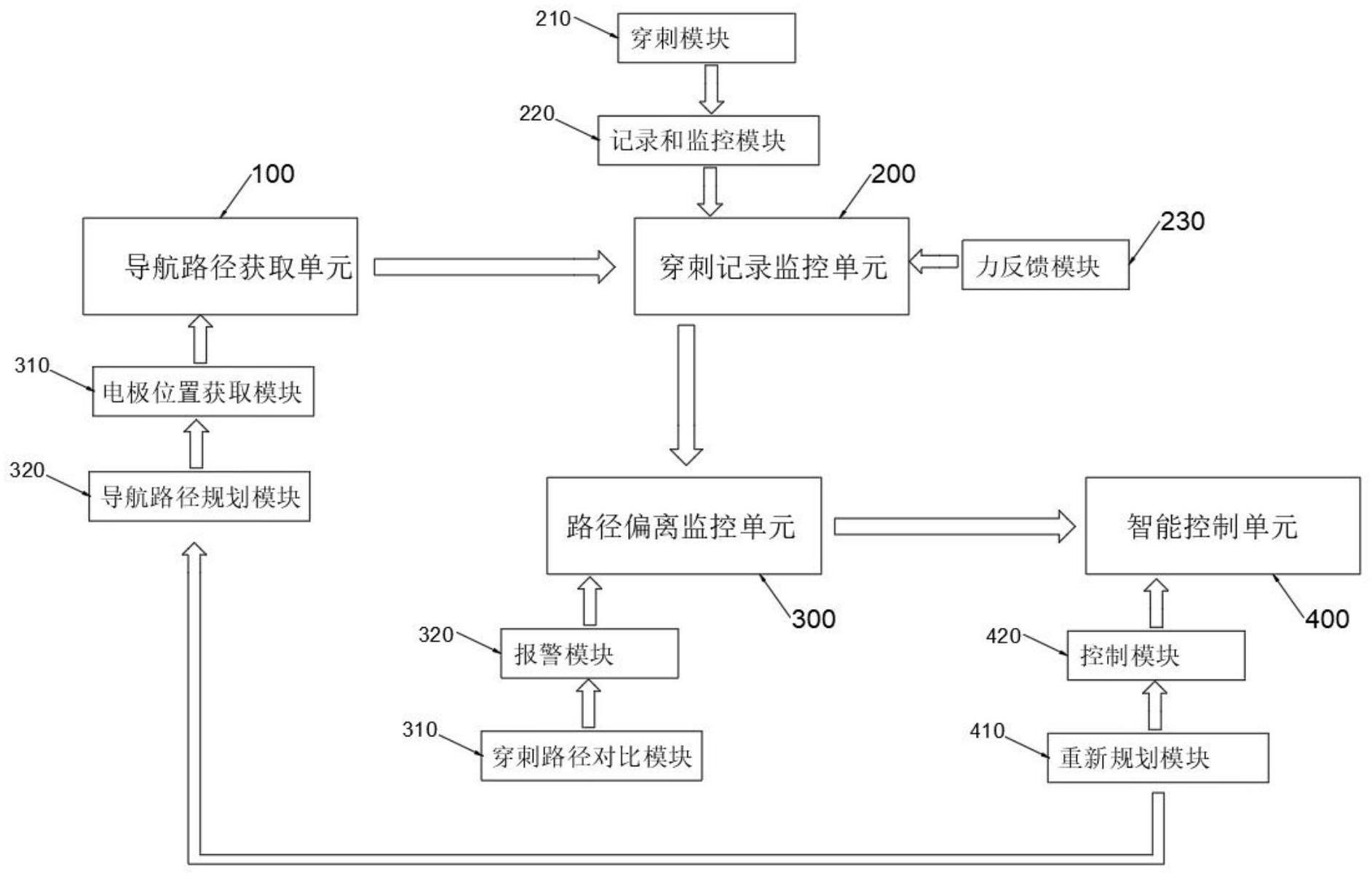
2、为实现上述目的,提供了电生理实时定位的脑深部电极自动植入系统,包括导航路径获取单元、穿刺记录监控单元、路径偏离监控单元和智能控制单元,其中;
3、所述导航路径获取单元用于扫描患者头部区域获取头部三维模型,监测和分析患者脑神经元活动的电信号,结合头部三维模型确定电极植入脑深部具体位置信息,根据位置信息制定穿刺植入电极导航路径;
4、所述穿刺记录监控单元用于获取导航路径获取单元中导航路径,并对患者头部进行穿刺操作,对穿刺路径进行实时记录和监控;
5、所述路径偏离监控单元用于设定偏离阈值,对穿刺路径与导航路径进行对比,当穿刺路径偏离设定偏离阈值,则报警提示并暂停穿刺作业,发送调整信号至智能控制单元;
6、智能控制单元用于接收路径偏离监控单元中调整信号,实时监测患者体征数据,并根据穿刺偏离位置为起始点,通过导航路径获取单元重新制定穿刺植入电极导航路径,同时智能控制单元控制电极的植入深度和速度,并实时监测和分析神经元活动的电信号,确保电极的位置和深度正确。
7、作为本技术方案的进一步改进,所述导航路径获取单元采用核磁共振仪,核磁共振仪利用磁场和无线电波来获取头部组织的信号,生成详细的断层图像从而获取头部三维模型。
8、作为本技术方案的进一步改进,所述导航路径获取单元中包括电极位置获取模块和导航路径规划模块;
9、所述电极位置获取模块通过脑电图获取患者脑神经元活动的电信号,并使用电生理设备对电信号进行分析,确定电极植入在脑深部的位置;
10、所述导航路径规划模块通过导航系统确定穿刺起始位置和电极植入位置,规划的穿刺路径并进行导航标记形成导航路径。
11、作为本技术方案的进一步改进,述穿刺记录监控单元包括穿刺模块和记录和监控模块;
12、所述穿刺模块用于控制机器臂的关节运动,使其按照设定的路径精确地对患者头部进行穿刺操作;
13、所述记录和监控模块通过实时影像采集显示机器臂的位置状态,以及穿刺路径的情况。
14、作为本技术方案的进一步改进,所述穿刺记录监控单元还包括力反馈模块,通过在机器臂上添加力传感器,可以实时感知机器臂与患者头部之间的接触力,从而调整穿刺力度。
15、作为本技术方案的进一步改进,所述路径偏离监控单元包括穿刺路径对比模块和报警模块;
16、所述穿刺路径对比模块用于设定偏离阈值,将实际穿刺路径与导航路径进行对比并计算偏离值,偏离值大于偏离阈值时则暂停穿刺作业;
17、所述报警模块用于接收穿刺路径对比模块中穿刺路径偏离信息,并进行报警提示。
18、作为本技术方案的进一步改进,所述路径偏离监控单元还包括实时反馈和校正模块,所述实时反馈和校正模块对穿刺路径偏差距离进行实时反馈,并提供校正建议。
19、作为本技术方案的进一步改进,所述智能控制单元通过心电监护仪、血压计、脉搏氧饱和度仪和呼吸监测仪对患者体征数据进行实时监测,用于判断患者生理状态,在穿刺作业过程中及时作出相应调整。
20、作为本技术方案的进一步改进,所述智能控制单元包括重新规划模块和控制模块;
21、所述重新规划模块用于定位实际穿刺过程中的偏离位置,将偏离位置作为新路径的起始点,通过导航路径规划模块重新制定穿刺植入电极导航路径;
22、所述控制模块通过静力平衡的原理来控制电极的植入深度和速度。
23、与现有技术相比,本发明的有益效果:
24、1、该电生理实时定位的脑深部电极自动植入系统中,通过导航路径获取单元扫描患者头部区域获取头部三维模型,定位电极植入脑深部具体位置,并制定穿刺植入电极导航路径,通过穿刺记录监控单元通过控制机器臂的关节运动,使其按照设定的路径精确地对患者头部进行穿刺操作,提高穿刺过程中的稳定性,同时,设定偏离阈值,通过路径偏离监控单元对穿刺路径与导航路径获取单元中导航路径进行对比,当路经偏离值大于偏离阈值时暂停穿刺作业,同时发送调整信号至智能控制单元,通过智能控制单元实时监测患者体征状态,并快速规划穿刺路径,对电极植入过程中实时监测,并在穿刺偏离时及时报警提醒,并规划新路径,保障对患者脑深部精准植入电极,提高治疗效果。
25、1、该电生理实时定位的脑深部电极自动植入系统中,通过力反馈模块在通机器臂上添加力反馈装置,可以实时感知机器臂与患者头部之间的接触力,操作人员可以根据力反馈装置提供的实时数据,在穿刺过程中调整机器臂施加的力度,以避免过度压力或力度不足,从而减少患者的不适和损伤。
技术特征:
1.一种电生理实时定位的脑深部电极自动植入系统,其特征在于:包括导航路径获取单元(100)、穿刺记录监控单元(200)、路径偏离监控单元(300)和智能控制单元(400),其中;
2.根据权利要求1所述的电生理实时定位的脑深部电极自动植入系统,其特征在于:所述所述导航路径获取单元(100)采用核磁共振仪,核磁共振仪利用磁场和无线电波来获取头部组织的信号,生成详细的断层图像从而获取头部三维模型。
3.根据权利要求1所述的电生理实时定位的脑深部电极自动植入系统,其特征在于:所述导航路径获取单元(100)中包括电极位置获取模块(110)和导航路径规划模块(120);
4.根据权利要求1所述的电生理实时定位的脑深部电极自动植入系统,其特征在于:所述穿刺记录监控单元(200)包括穿刺模块(210)和记录和监控模块(220);
5.根据权利要求4所述的电生理实时定位的脑深部电极自动植入系统,其特征在于:所述穿刺记录监控单元(200)还包括力反馈模块(230),通过在机器臂上添加力传感器,可以实时感知机器臂与患者头部之间的接触力,从而调整穿刺力度。
6.根据权利要求1所述的电生理实时定位的脑深部电极自动植入系统,其特征在于:所述路径偏离监控单元(300)包括穿刺路径对比模块(310)和报警模块(320);
7.根据权利要求6所述的电生理实时定位的脑深部电极自动植入系统,其特征在于:所述路径偏离监控单元(300)还包括实时反馈和校正模块(330),所述实时反馈和校正模块(330)对穿刺路径偏差距离进行实时反馈,并提供校正建议。
8.根据权利要求1所述的电生理实时定位的脑深部电极自动植入系统,其特征在于:所述智能控制单元(400)通过心电监护仪、血压计、脉搏氧饱和度仪和呼吸监测仪对患者体征数据进行实时监测,用于判断患者生理状态,在穿刺作业过程中及时作出相应调整。
9.根据权利要求1所述的电生理实时定位的脑深部电极自动植入系统,其特征在于:所述智能控制单元(400)包括重新规划模块(410)和控制模块(420);
技术总结
本发明涉及脑深部电极植入技术领域,具体地说,涉及一种电生理实时定位的脑深部电极自动植入系统,包括导航路径获取单元、穿刺记录监控单元、路径偏离监控单元和智能控制单元,导航路径获取单元通过扫描患者头部区域获取头部三维模型,定位电极植入脑深部具体位置,并制定穿刺植入电极导航路径,按照设定的路径精确地对患者头部进行穿刺操作,同时,通过路径偏离监控单元对穿刺路径与导航路径获取单元中导航路径进行对比,当路经偏离值大于偏离阈值时暂停穿刺作业,同时发送调整信号至智能控制单元,并快速规划穿刺路径,在穿刺偏离时及时报警提醒,并规划新路径,保障对患者脑深部精准植入电极,提高治疗效果。
技术研发人员:庄乾兴,闫琦,朱慧娴,蒋意苗,袁王睿,卢绪娟
受保护的技术使用者:南通大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!