基于肢体运动和触觉反馈的可穿戴主从控制接口系统
本发明涉及机器人,特别是涉及一种基于肢体运动和触觉反馈的可穿戴主从控制接口系统。
背景技术:
1、为了完成更加复杂的手术任务和实现更加灵巧的手术操作,研究多自由度手术机器人已成为当前手术机器人研究的主要趋势之一。然而,随着手术机器人自由度的增加,医生很难单纯依靠双手同时完成多种手术操作,往往需要更多助手的参与,造成更多医疗资源的占用。为了提高单个医生的操作效率,借助人机交互技术,通过双手以外的其它肢体部位(如足部、躯干、头部、腿部等)分担双手的操作负担是一种可行的手段。尽管这些肢体部位的运动灵活性逊色于双手,但依然可以胜任一些对精细度要求不高的操作任务。
2、由于人体的本体感知对肢体微小运动的不够敏感,因此,操作者很难主动抑制肢体的无意识运动,导致手术机器人误操作的发生,导致降低机器人控制的安全性和精确性。因此,针对人机交互领域的应用,设计一套可穿戴且能够辅助双手完成额外操作的主从控制接口系统,以实现当医生的双手被占用,能借助该系统,医生可通过自身其它肢体部位的运动辅助双手完成额外的操作,从而提高医生的工作效率,具有重要意义。
技术实现思路
1、本发明的目的是针对现有技术中存在的技术缺陷,而提供一种旨在提高单个医生操作手术机器人的效率的基于肢体运动和触觉反馈的可穿戴主从控制接口系统,是一种解放双手的新型主从控制接口,其将医生的肢体的运动信号映射为手术机器人不同自由度的控制信号,可以让操作者通过双手以外的多个肢体部位的协同配合同时完成机器人多个自由度的控制。
2、为实现本发明的目的所采用的技术方案是:
3、一种基于肢体运动和触觉反馈的可穿戴主从控制接口系统,包括:
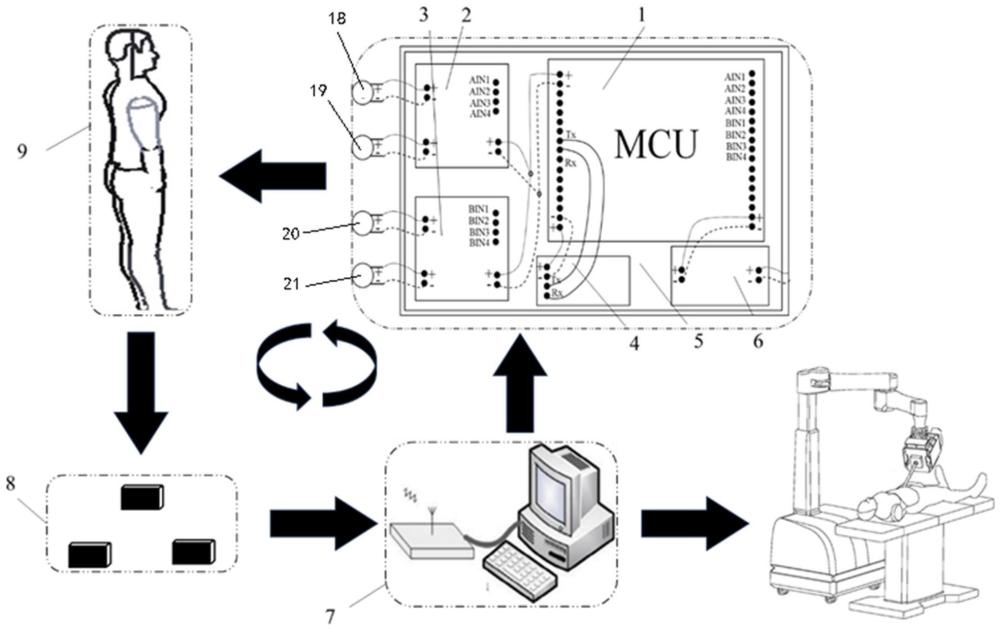
4、运动信号采集模块,用于实时获取医生预定肢体的肢体运动信号;
5、上位机,用于基于所述肢体运动信号判断医生是否发生无意识运动,若否,则使肢体运动信号映射为控制手术平台的控制信号并传输手术机器人平台;若是,则产生触觉反馈装置的控制指令;
6、下位机,用于根据所述控制指令发送激活信号至触觉反馈装置;
7、触觉反馈装置,用于根据所述激活信号激活以对医生施加触觉刺激,提醒医生对预定肢体的无意识运动纠正。
8、其中,所述运动信号采集模块包括穿戴在医生除手部外的肢体部位的惯性传感器。
9、其中,所述上位机包括电脑,所述电脑包括台式电脑或笔记本电脑。
10、其中,所述下位机包括微控制器,与所述微控制器连接电机驱动模块、信号传输模块以及电池模块,所述电机驱动模块与所述触觉反馈装置相连接,所述下位机通过所述信号传输模块与所述上位机无线通讯连接。
11、其中,所述激活信号为pwm脉宽调制的脉冲信号。
12、其中,所述触觉反馈装置为多个,布置于医生预定肢体的相应位置。
13、其中,所述运动信号采集模块为多个,布置于医生预定肢体的相应位置。
14、其中,所述医生预定肢体包括头部、腰部和前脚背。
15、其中,所述触觉反馈装置包括振动马达。
16、其中,所述运动信号采集模块与所述下位机通过杜邦线相连接。
17、本发明通过基于多肢体部位运动配合的可穿戴主从控制接口,提高了单个医生进行手术机器人操作的效率,借助该可穿戴主从控制接口,可充分发挥双手以外其他肢体部位参与手术操作的潜力,减轻医生的双手操作负担,让其专注于对精细度有更高要求的手术操作。
18、本发明的可穿戴的触觉反馈装置,搭载有体积小、重量轻的振动马达,可避免由于额外穿戴触觉反馈装置对操作者造成明显不适。此外,振动马达可在医生出现明显无意识运动时提供反馈信息,从而抑制由于无意识运动造成的操作误差,从而提高手术操作的安全性和精确性。
技术特征:
1.基于肢体运动和触觉反馈的可穿戴主从控制接口系统,其特征在于,包括:
2.根据权利要求1所述基于肢体运动和触觉反馈的可穿戴主从控制接口系统,其特征在于,所述运动信号采集模块包括穿戴在医生除手部外的肢体部位的惯性传感器。
3.根据权利要求1所述基于肢体运动和触觉反馈的可穿戴主从控制接口系统,其特征在于,所述上位机包括电脑,所述电脑包括台式电脑或笔记本电脑。
4.根据权利要求1所述基于肢体运动和触觉反馈的可穿戴主从控制接口系统,其特征在于,所述下位机包括微控制器,与所述微控制器连接电机驱动模块、信号传输模块以及电池模块,所述电机驱动模块与所述触觉反馈装置相连接,所述下位机通过所述信号传输模块与所述上位机无线通讯连接。
5.根据权利要求1所述基于肢体运动和触觉反馈的可穿戴主从控制接口系统,其特征在于,所述激活信号为pwm脉宽调制的脉冲信号。
6.根据权利要求1所述基于肢体运动和触觉反馈的可穿戴主从控制接口系统,其特征在于,所述触觉反馈装置为多个,布置于医生预定肢体的相应位置。
7.根据权利要求1所述基于肢体运动和触觉反馈的可穿戴主从控制接口系统,其特征在于,所述运动信号采集模块为多个,布置于医生预定肢体的相应位置。
8.根据权利要求1所述基于肢体运动和触觉反馈的可穿戴主从控制接口系统,其特征在于,所述医生预定肢体包括头部、腰部和前脚背。
9.根据权利要求1所述基于肢体运动和触觉反馈的可穿戴主从控制接口系统,其特征在于,所述触觉反馈装置包括振动马达。
10.根据权利要求1所述基于肢体运动和触觉反馈的可穿戴主从控制接口系统,其特征在于,所述运动信号采集模块与所述下位机通过杜邦线相连接。
技术总结
本发明公开了基于肢体运动和触觉反馈的可穿戴主从控制接口系统,包括:运动信号采集模块,用于实时获取医生预定肢体的肢体运动信号;上位机,用于根据肢体运动信号判断医生是否发生无意识运动,若否,则使肢体运动信号映射为控制手术平台的控制信号并传输手术机器人平台;若是,则产生触觉反馈装置的控制指令;下位机,用于根据控制指令发送激活信号至触觉反馈装置;触觉反馈装置,用于根据激活信号激活以对医生施加触觉刺激,提醒医生对预定肢体的无意识运动纠正。本发明保障操作安全性的前提下,让医生更多的肢体部位参与机器人控制,从而提高手术操作效率。
技术研发人员:陈保君,林强,张阳,左思洋
受保护的技术使用者:天津大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!