三源CT系统校准及质量控制中模体中心位置获取方法与流程
本发明属于医疗设施,具体是一种三源ct系统校准及质量控制中模体中心位置获取方法。
背景技术:
1、在ct系统校准及质量保证或质量控制过程中,需要获得用于校准或质控的圆柱型模体(一般为水模或聚丙烯(pp)模体)的中心位置。并将模体调整到视野中心,或其它特定的位置,模体中心位置的精度一般要求在1mm以内,以便于校准过程中的拟合计算和自动化质量控制流程。
2、因此,获取高精度的模体中心位置是系统校准、系统质量保证或质量控制的关键。
3、现有的单源或双源的ct系统,通常需要通过旋转一周获取的全部数据(正弦图,sinogram)来计算模体中心位置(如图5和6所示),需要的信噪比较好的360度旋转数据采集,需要的时间长,剂量高。
4、找到模体中心线在正弦图上的投影,或者模体投影在正弦图上的中心线,中心线与中心通道的距离的最大值,即为模体中心偏离旋转中心的距离,偏离的方向就是距离最大的该次投影采样角度的垂直方向。
5、方法示意如图7所示:在360度数据中有两个最大距离的采样点,他们之间的相位差为180度,即角度正对着的两次采样。
6、既然360度的一整周数据可以得到模体中心线,进而得到中心线与中心通道直线的距离最大值以及最大值对应的采样角度,从而得到模体中心的偏移。理论上通过更少的角度也能计算得到模体中心及其偏移。在传统单源ct系统中,得到离散的不同角度的静止采样花费的时间比旋转采集一整圈花费的时间还要长,因此,通过离散的少数角度的采样来得到模体中心的方法并没有被采用。
技术实现思路
1、本发明为了解决上述现有技术中存在的缺陷和不足,提供了一种在三源三探测器的ct系统中,由于存在三个x射线源和探测器,机架不需要任何旋转就可以得到间隔指定角度的三个采样,时间可以缩短到原来的1/1000及以下,剂量也可以降低到原来的1/1000及以下,从而可以获取高精度的模体中心位置的三源ct系统校准及质量控制中模体中心位置获取方法。
2、本发明解决其技术问题所采用的技术方案是:一种三源ct系统校准及质量控制中模体中心位置获取方法,
3、在三源三探测器的ct系统中,由于存在三个x射线源和探测器,机架不需要任何旋转就可以得到间隔指定角度的三个采样,时间可以缩短到原来的1/1000及以下,剂量也可以降低到原来的1/1000及以下,要得到平面内点的位置,只需要知道穿过这个点的两条直线;因此三源ct系统在静止状态下采集的间隔指定角度的三个采样可以得到模体的中心位置。
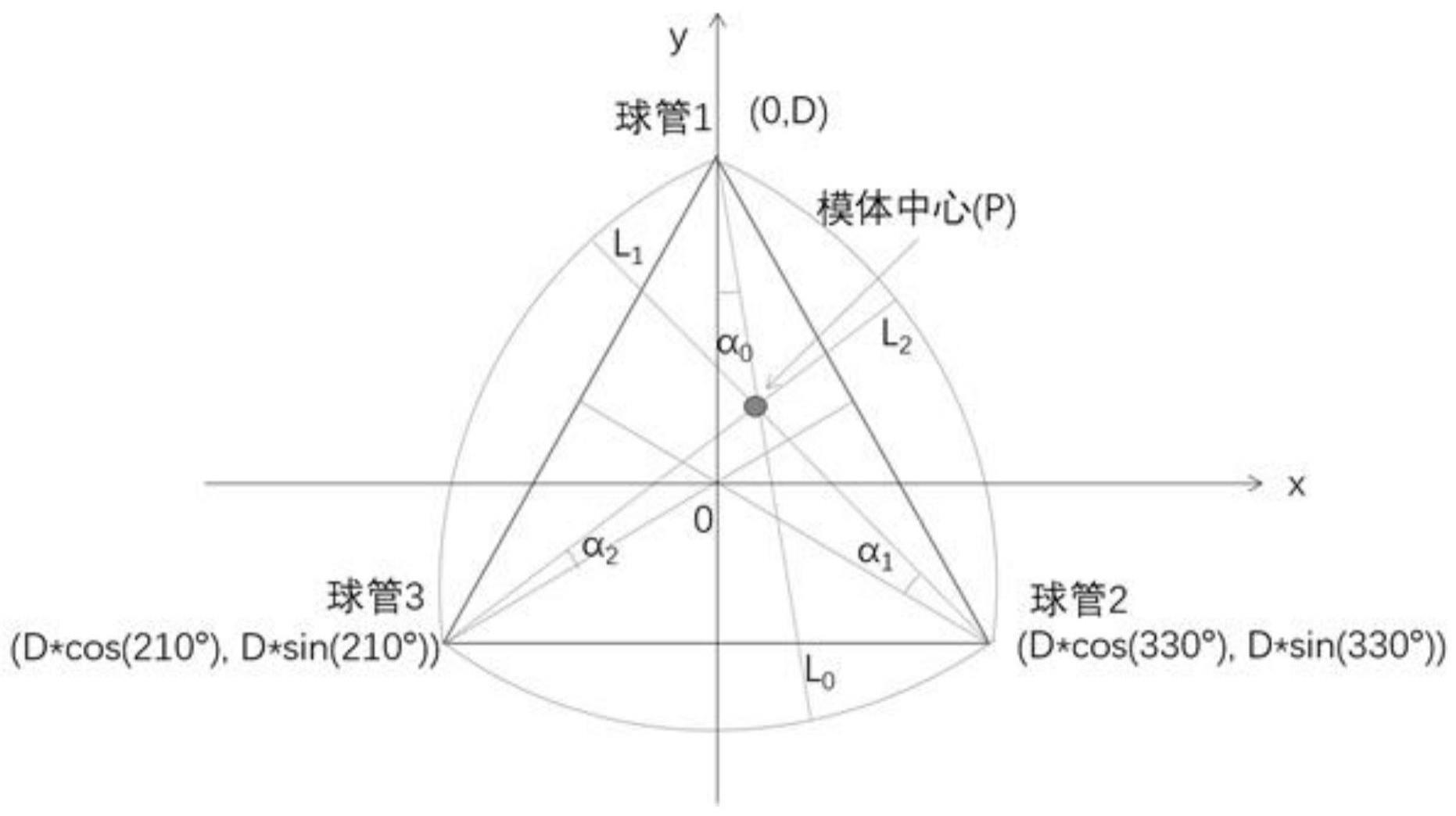
4、优选地,假设模体中心位于p点处,在球管1(如0度)对应的采样中模体中心穿过的通道(直线l0)与中心通道的夹角为α0,在球管2(如120度)对应的采样中模体中心穿过的通道(直线l1)与中心通道的夹角为α1,在球管3(如240度)对应的采样中模体中心穿过的通道(直线l2)与中心通道的夹角为α2;则:
5、直线l0的方程为:
6、y=tan(α0+90°)x+d,其中d为焦点到旋转中心的距离;
7、直线l1的方程为:
8、y=tan(α1+330°)x+d(sin(330°)-tan(α1+330°)*cos(330°)),
9、其中d为焦点到旋转中心的距离;
10、直线l2的方程为:
11、y=tan(α2+210°)x+d(sin(210°)-tan(α1+210)*cos(210°)),其
12、中d为焦点到旋转中心的距离;
13、其中任意两条直线的交点即为模体中心位置。
14、优选地,计算出三组模体中心位置,分别为l0和l1的交点(x01,y01),l0和l2的交点(x02,y02),l1和l2的交点(x12,y12),如果这三个点是完全重合的;但由于采样及计算精度的影响,三个点的坐标可能略有偏差,为了获得更准确的结果,可以将三个点的坐标的平均值作为测量和计算结果,即x=(x01+x02+x12)/3,y=(y01+y02+y12)/3。
15、优选地,采用模拟方法获得了x和y方向偏移分别为-6.84mm,-3.91mm的模体,通过扇束正投影方法得到360度采样的sinogram数据,通过抽取0度,120度和240度的采样数据模拟三源ct中球管1,球管2和球管3的采样。
16、优选地,得到的中心位置偏移分别为:
17、x01=-6.39,x02=-7.05,x12=-6.71
18、y01=-4.13,y02=-4.14,y12=-3.55
19、三点平均值:
20、x=-6.72,y=-3.94
21、两条直线交点与实际模体中心偏移的最大偏差x向为0.36mm,y向为0.45mm;
22、三个交点的平均值与模体中心偏移的偏差x向为0.03,y向为0.12;
23、均显著优于1mm的精度要求,且平均值能显著缩小偏差。
24、本发明在三源三探测器的ct系统中,由于存在三个x射线源和探测器,机架不需要任何旋转就可以得到间隔指定角度的三个采样,时间可以缩短到原来的1/1000及以下,剂量也可以降低到原来的1/1000及以下,从而可以获取高精度的模体中心位置。
技术特征:
1.一种三源ct系统校准及质量控制中模体中心位置获取方法,其特征在于:
2.根据权利要求1所述的一种三源ct系统校准及质量控制中模体中心位置获取方法,其特征在于:假设模体中心位于p点处,在球管1(如0度)对应的采样中模体中心穿过的通道(直线l0)与中心通道的夹角为α0,在球管2(如120度)对应的采样中模体中心穿过的通道(直线l1)与中心通道的夹角为α1,在球管3(如240度)对应的采样中模体中心穿过的通道(直线l2)与中心通道的夹角为α2;则:
3.根据权利要求2所述的一种三源ct系统校准及质量控制中模体中心位置获取方法,其特征在于:计算出三组模体中心位置,分别为l0和l1的交点(x01,y01),l0和l2的交点(x02,y02),l1和l2的交点(x12,y12),如果模体中心在ct机架的旋转中心,则这三个点是完全重合的;但由于采样及计算精度的影响,三个点的坐标可能略有偏差,为了获得更准确的结果,可以将三个点的坐标的平均值作为测量和计算结果,即x=(x01+x02+x12)/3,y=(y01+y02+y12)/3。
4.根据权利要求3所述的一种三源ct系统校准及质量控制中模体中心位置获取方法,其特征在于:例如,采用模拟方法获得了x和y方向偏移分别为-6.84mm,-3.91mm的模体,通过扇束正投影方法得到360度采样的sinogram数据,通过抽取0度,120度和240度的采样数据模拟三源ct中球管1,球管2和球管3的采样。
5.根据权利要求4所述的一种三源ct系统校准及质量控制中模体中心位置获取方法,其特征在于:计算得到的中心位置偏移分别为:
技术总结
本发明公开了一种三源CT系统校准及质量控制过程中模体中心位置的获取方法。在三源三探测器的CT系统中,由于存在三个X射线源和三个探测器,机架不需要旋转就可以得到间隔指定角度的三个采样,时间可以缩短到常规CT定位方法的1/1000及以下,剂量也可以降低到原来的1/1000及以下。要得到平面内点的位置,只需要知道穿过这个点的两条直线,因此三源CT系统在静止状态下采集的间隔指定角度的三个采样可以得到模体的中心位置。本发明实现快速、超低剂量条件下获取高精度的模体中心位置。
技术研发人员:邢占峰,王鑫,于淼,赵伟强,李万锋,高娜,徐昊
受保护的技术使用者:北京富通康影科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!