手术器械传动机构、装配方法及手术器械驱动装置与流程
本发明涉及医疗器械,尤其涉及一种手术器械传动机构、该手术器械传动机构的装配方法、以及手术器械驱动装置。
背景技术:
1、近年来,随着科学技术的发展以及医学需求的提高,用于辅助实现微创手术的微创手术机器人应运而生并得到了迅速发展,它是集图像系统、控制系统、机构系统等三大系统于一体的现代化医疗设备。机器人微创手术具有很多独特的优点,如较低的组织创伤、较高的手术操作质量、较短的康复时间、更加舒适的手术操作和更强的复杂手术适应能力等。因而在临床上有大量的应用。
2、手术机器人中用于进行手术操作的手术器械通常需要通过传动构件与电机相连接,由电机经由传动构件来对手术器械进行驱动。
3、另外,手术器械通常要求进行无菌操作,因此,需要利用无菌适配器来连接用于连接在手术机器人机械臂上的电机传动构件以及用于连接手术器械的器械传动构件,以实现无菌隔离,并同时使器械传动构件、无菌适配器和电机传动构件随着机械臂一起进行旋转或移动。
技术实现思路
1、发明所要解决的技术问题
2、在现有技术中,有通过使电机传动构件的旋转轴线与无菌适配器的旋转轴线对齐,并使无菌适配器的凹槽容纳电机传动构件的突出部来锁定,从而实现无菌适配器与电机传动构件的连接。
3、然而,在上述方法中,由于电机传动构件与无菌适配器因接触而产生的摩擦力的力矩较大,因此,容易发生在突出部与凹槽完成配合之前电机传动构件就带动无菌适配器一起转动的问题。
4、另外,在现有技术中,通常将突出部的截面形状设为正方形等形状。由于接触面积较小,因此,会导致接触应力增大,从而会造成传动构件的损坏。
5、此外,在现有技术中,当电机传动构件设有多个突出部时,若各突出部相对于转轴呈对称配置且各突出部形状相同,则存在难以确保电机传动构件与无菌适配器之间的对接角度固定的技术问题。
6、本发明的目的在于提供一种手术器械传动机构、装配方法及手术器械驱动装置,能够在进行装配时,降低传动构件间的摩擦力矩,从而能防止传动构件在完成对接前发生跟转,确保传动构件间的对接精度。
7、解决技术问题的技术方案
8、本发明的第一方面所涉及的手术器械传动机构包括:
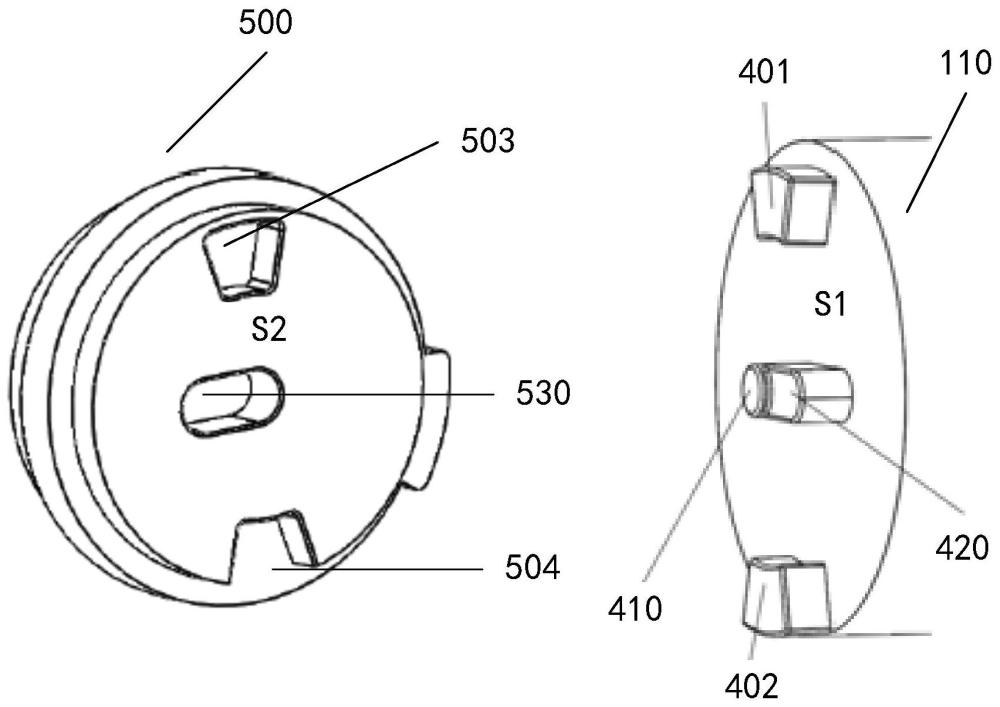
9、第一传动构件,所述第一传动构件具有大致圆形的第一装配面,所述第一装配面上设置有位于中心的突起、靠近所述突起的对位块、及远离所述突起且沿周向配置的凸台,其中,所述突起相对于所述第一装配面的高度大于所述对位块相对于所述第一装配面的高度,所述对位块相对于所述第一装配面的高度大于所述凸台相对于所述第一装配面的高度;以及
10、第二传动构件,所述第二传动构件具有与所述第一装配面相对的第二装配面,所述第二装配面设置有与所述突起和所述对位块相对应的对位槽、及与所述凸台相对应的凹槽。
11、另外,优选所述第一装配面设置有至少两个以上相对于所述中心呈非对称配置的所述凸台。
12、另外,进一步优选至少两个以上的所述凸台的形状不同。
13、另外,优选所述第一装配面设置有至少两个以上相对于所述中心呈对称配置的所述凸台,至少两个以上的所述凸台的形状不同。
14、另外,优选所述凸台与相对应的所述凹槽过盈配合。
15、另外,优选所述凸台的平行于所述第一装配面的截面的形状为扇形。
16、另外,优选所述第二传动构件包括无菌膜。
17、另外,优选所述第一传动构件还包括:固定部,所述固定部具有设置在侧壁上的轴向限位构件,所述固定部与电机相连接;可动部,所述可动部具有设置在侧壁上的轴向限位滑槽,并配置有所述第一装配面,能够相对于所述固定部沿与所述第一装配面垂直的方向进行移动;以及弹性构件,所述弹性构件夹在所述可动部与所述固定部之间,用于提供使所述可动部与所述固定部互相分离的力,其中,所述轴向限位构件插入所述轴向限位滑槽,对所述可动部与所述固定部之间沿与所述第一装配面垂直的方向和周向的相对移动进行限制。
18、另外,优选所述轴向限位滑槽沿与所述第一装配面垂直的方向的长度大于等于所述对位块相对于所述第一装配面的高度。
19、另外,优选所述弹性构件为弹簧。
20、另外,本发明的第二方面所涉及的手术器械驱动装置包括:
21、电机;如本发明实施方式所述的第一传动构件,所述第一传动构件的与所述第一装配面相反的一侧与所述电机相连接;
22、如本发明实施方式所述的第二传动构件,所述第二传动构件的所述第二装配面与所述第一装配面相接,所述第二传动构件的与所述第二装配面相反的一侧具有第三装配面;
23、第三传动构件,所述第三传动构件具有与所述第三装配面相接的第四装配面;以及
24、手术器械,所述手术器械与所述第三传动构件的与所述第四装配面s4相反的一侧相连接,所述电机经由所述第一传动构件、所述第二传动构件及所述第三传动构件,对所述手术器械进行驱动。
25、另外,本发明的第三方面所涉及的手术器械传动机构的装配方法是对本发明的第一方面所涉及的手术器械传动机构进行装配的方法,包括:将第二传动构件靠向第一传动构件,并且使所述第一传动构件与所述第二传动构件相互按压,从而使所述突起与所述对位槽相配合;使所述第一传动构件与所述第二传动构件继续相互按压,使所述对位块与所述第二装配面相接触;使所述第一传动构件绕通过所述中心并与所述第一装配面垂直的转轴进行旋转;随着所述第一传动构件的旋转,使所述对位块与所述对位槽相配合,并使所述凸台与所述凹槽相配合;以及进一步使所述第一传动构件向所述第二传动构件进行按压,使所述凸台与所述凹槽完成对接。
26、另外,本发明的第四方面所涉及的手术器械传动机构的装配方法是对本发明的第一方面所涉及的手术器械传动机构进行装配的方法,包括:将第二传动构件靠向第一传动构件,并且使所述第一传动构件与第二传动构件相互按压,从而使所述突起与所述对位槽相配合;使所述第一传动构件与第二传动构件继续相互按压,从而使所述对位块与所述第二装配面相接触;使所述第一传动构件绕通过所述中心并与所述第一装配面垂直的转轴进行旋转;所述旋转使得所述弹性构件被压缩,进而使得所述可动部向所述固定部进行移动与所述对位块相对于所述第一装配面的高度相对应的压缩量;随着所述第一传动构件的旋转,所述对位块与所述对位槽相配合,并使所述凸台与所述凹槽相配合;利用所述弹性构件所提供的力,进一步使所述可动部向所述第二传动构件进行按压,使所述凸台与所述凹槽完成对接。
27、发明效果
28、根据本发明的手术器械传动机构、装配方法及手术器械驱动装置,能够在进行装配时,降低传动构件间的摩擦力矩,从而能防止传动构件在完成对接前发生跟转,确保传动构件间的对接精度。
技术特征:
1.一种手术器械传动机构,其特征在于,包括:
2.如权利要求1所述的手术器械传动机构,其特征在于,
3.如权利要求2所述的手术器械传动机构,其特征在于,
4.如权利要求1所述的手术器械传动机构,其特征在于,
5.如权利要求1至4的任一项所述的手术器械传动机构,其特征在于,
6.如权利要求1至4的任一项所述的手术器械传动机构,其特征在于,
7.如权利要求1至4的任一项所述的手术器械传动机构,其特征在于,
8.如权利要求1至4的任一项所述的手术器械传动机构,其特征在于,
9.如权利要求8所述的手术器械传动机构,其特征在于,
10.如权利要求8所述的手术器械传动机构,其特征在于,
11.一种手术器械驱动装置,其特征在于,包括:
12.一种用于对如权利要求1至7的任一项所述的手术器械传动机构进行装配的方法,其特征在于,包括:
13.一种用于对如权利要求8至10的任一项所述的手术器械传动机构进行装配的方法,其特征在于,包括:
技术总结
本发明提供一种能在装配时降低传动构件间的摩擦力矩从而防止传动构件在完成对接前发生跟转的手术器械传动机构、装配方法及手术器械驱动装置。所述手术器械传动机构包括:具有大致圆形的第一装配面的第一传动构件,所述第一装配面上设置有位于中心的突起、靠近所述突起的对位块、及远离所述突起且沿周向配置的凸台,其中,所述突起相对于所述第一装配面的高度大于所述对位块相对于所述第一装配面的高度,所述对位块相对于所述第一装配面的高度大于所述凸台相对于所述第一装配面的高度;以及具有与所述第一装配面相对的第二装配面的第二传动构件,所述第二装配面设置有与所述突起和所述对位块相对应的对位槽、及与所述凸台相对应的凹槽。
技术研发人员:李献杰,马峰
受保护的技术使用者:医达极星医疗科技(苏州)有限公司
技术研发日:
技术公布日:2024/1/5
- 还没有人留言评论。精彩留言会获得点赞!