一种智能配药机器人及其配药方法
本发明具体涉及一种智能配药机器人及其配药方法
背景技术:
1、随着人们生活水平的不断提高,恶性肿瘤已经成为危害人们生活健康的主要威胁病种之一。根据国际癌症研究机构发布的最新数据显示,2020年全球癌症新发1929万例,死亡996万例,其中中国癌症新发457万例,死亡300万例。而其中,以放化疗药物作为治疗癌症的主要手段,然而很多放化疗药物具有毒性与腐蚀性,长此以往会对注射人员的身体产生伤害。近年来,职业安全已成为医务人员,特别是护理人员越来越关注的问题。
技术实现思路
1、为了解决上述问题,本发明提出了一种智能配药机器人及其配药方法,以实现识别储药管、自动注药和注药检测等操作。
2、本发明的技术方案如下:
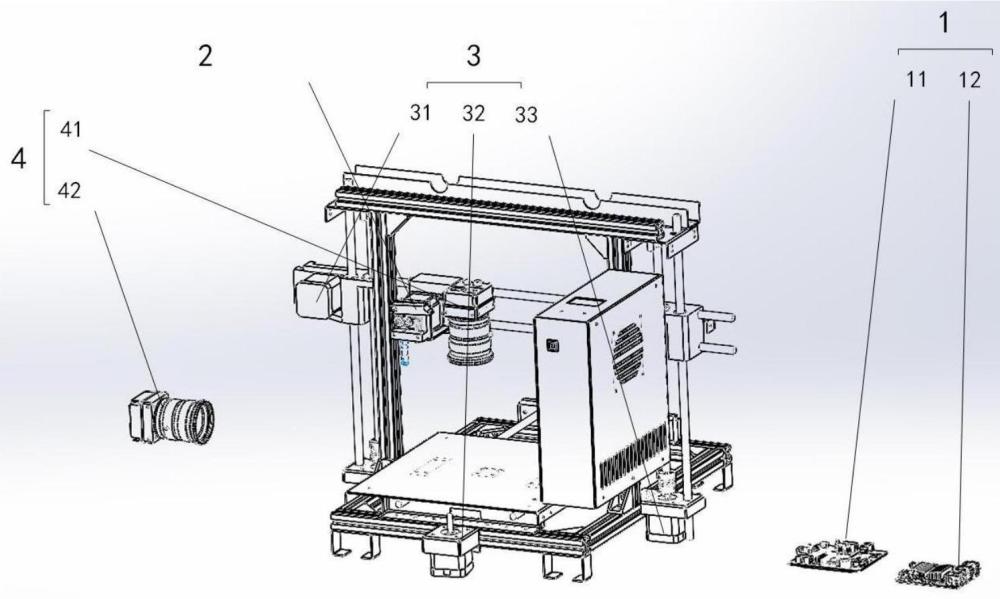
3、一种智能配药机器人,包括:
4、主控模块,进行储药管的实时识别,并对运动驱动模块和注药模块进行控制;
5、注射模块,对待注射的储药管注射药物;
6、运动驱动模块,控制智能配药机器人的三轴运动;
7、图像采集模块,获取待注射的储药管的注射具体情况。
8、可选地,所述主控模块包括:ti am5708工业派、语音提示模块和步进电机驱动板,所述语音提示模块和步进电机驱动板与ti am5708工业派连接。
9、可选地,所述注射模块包括:步进电机、高精度不锈钢加压助推器和针管,所述针管内侧通过固定架设置于所述高精度不锈钢加压助推器内侧,所述高精度不锈钢加压助推器与步进电机外侧连接,所述注射模块通过连接件与运动驱动x轴连接。
10、可选地,所述运动驱动模块包括:运动驱动x轴、运动驱动y轴和运动驱动z轴,所运动驱动x轴、运动驱动y轴和运动驱动z轴由欧标2020黑色铝合金组成为框架,所运动驱动x轴、运动驱动y轴和运动驱动z轴通过步进电机连接件与步进电机连接,所述步进电机驱动板与步进电机连接。
11、可选地,所述图像采集模块包括:俯视大恒工业相机和侧视大恒工业相机,所述图像采集模块与所述运动驱动模块连接。
12、本发明还包括一种智能配药机器人及其配药方法,其包括步骤:
13、通过设计的智能配药机器人,在智能医疗注药系统启动完成后,在手动操控模式界面中进行控制智能配药机器人的三轴运动与注射,同时实时查看运动与注射的具体数据。
14、也可以选择自动注射,系统会自动控制运动平台和注药模块完成注射,在边缘中心检测界面中选择已经存储好的模板,通过传统图像处理或深度学习图像处理对待注射的储药管进行定位检测,并可以在注药检测模式界面计算已经注射的药量。
15、本发明与现有技术相比,具有的有益效果是:
16、本发明的硬件结构设计采用的是运动平台中的龙门机械结构。这种机械结构最大的优点便是z轴运动十分平缓稳定。本发明在深度学习方面选择yolov7算法,以实现准确率高、实时性好的要求。本发明搭建nfs网络文件系统,构建了工业派的根文件系统,以进行主机与开发板之间的局域网通信。本发明调用并改进大恒工业相机的sdk,用来获取图像并进行处理。本发明采用的图像处理算法具有较强的通用性和可移植性,可以实现对其他形状储药管的检测。
技术特征:
1.一种智能配药机器人及其配药方法,其特征在于:
技术总结
一种智能配药机器人及其配药方法。配药机器人包括:主控模块、注射模块、运动驱动模块、图像采集模块。所述主控模块使用TI AM5708工业派进行储药管的实时识别,定位储药管位置以及获取已注射的药液量,并对运动驱动模块和注药模块进行控制。所述注射模块由一个步进电机、高精度不锈钢加压助推器和针管组成。所述运动驱动模块通过使用5个步进电机设计了运动驱动部分以及注射部分。所述图像采集模块通过使用两个大恒工业相机,以进行待注射的储药管的定位与检测。通过步进电机控制高精度不锈钢加压助推器推进,使其带动针管下压完成注射并能够实时监控,测试结果表明该机器人具有精度高、实时性强、成本低、体积小、设计灵活等优点。
技术研发人员:李东洁,魏剑桥,梁雨,张富越,杨柳,王明瑞
受保护的技术使用者:哈尔滨理工大学
技术研发日:
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!